Изобретение относится к автоматическим устройствам для управления процессами намотки длинномерных материалов, преимущественно провода.
Цель изобретения - повышение качества намотки путем синхронизации скоростей намотки и раскладки провода.
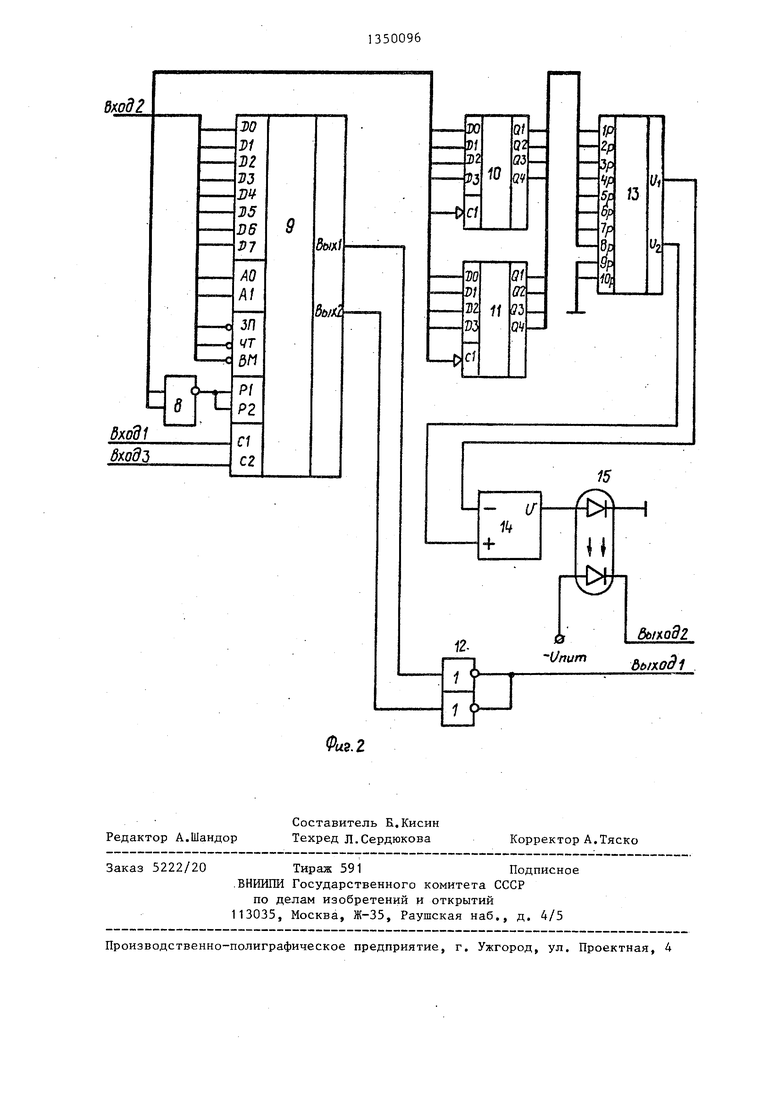
На фиг. 1 представлена структурная схема предлагаемого устройства, на фиг. 2 - блок-схема синхронизатора.
Устройство для управления намот- кой многослойных электрических катушек содержит электродвигатель I катушки, блок 2 программного управ- ления, электропривод 3 раскладки, импульсный датчик 4 скорости и,углового положения катушки,.синхронизатор 5, импульсный датчик 6 скорости раскладки и программируемый таймер 7 На валу электродвигателя 1 катушки установлен датчик 4, первый выход которого соединен с первым входом блока 2 программного управления, выполненного на базе микроконтроллера K1-2Q., а второй выход датчика 4 соединен с первым входом программируемого таймера 7 и с первым входом синхронизатора 5, первый выход которого соединен с вторым входом блока 2 программного управления, второй его выход подсоединен к второму входу электропривода 3 раскладки, на валу которого расположен датчик 6, а третий выход блока 2 программного управления подключен к второму входу программируемого таймера 7,, выход которого подключен к третьему входу блока 2 программного управления, при этом выход датчика 6 соединен с третьим входом синхронизатора 5, второй вход которого соединен с вторым входом блока 2 программного управления.
Синхронизатор 5 состоит из элемента 2И-НЕ 8, программируемого таймера 9, работающего в режиме счетчика реальных событий и имеющего двунаправленные входы-выходы , адресные входы АО и А1, входы чтения (ЧТ), записи (ЗП) и выборки (ВМ), входы разрешения Р1 и Р2 и счетные входы С1 и С2, Синхронизатор 5 включает триггеры 10 и 11, элементы НЕ 12, цифроаналоговый преобразователь 13, выходы которого через операционный усилитель 14 связаны с
диодным патроном 15. При этом входы Dp-D, АО, А1, ЗИ, ЧТ и ВМ подключе-; ны к соответствующим входам тригге- ров 10 и 11 и через элемент И-НЕ 8 к входам Р1 и Р2 таймера 9, выходы которых связаны с входами элементов НЕ 12. Входы цифроаналогового преобразователя 13 соединены с соответ- ствующими входами триггеров 10 и 11.
Датчики 4 и 6 могут быть выполнены в виде растрового диска, взаимодействующего со светодиодами и с фотодиодами, подключенными например, к операционным усилителям, связанным с формирователями.
Устройство работает следующим образом.
Предварительно расчетным путем определяется угловая скорость раскладки в зависимости от выбранной угловой скорости намотки и диаметра провода, которые связаны соотношением
Пр
Плйпр К,(1)
где Пц - угловая скорость привода намотки ,
угловая скорость привода раскладкиJ
коэффициент передачи раскладочной головки .
П„ К: -
35
df,n - диаметр провода.
лр
Для шаговой намотки имеем
П,
iiiliHaE.
Пи(а
к,
(2)
где & - шаг намотки
Вычисленные значения угловых скоростей раскладки и намотки заносятся в виде кода в постоянную память блока 2 программного управления и в процессе работы устройства используются в качестве программных значений.
Для поддержания заданных угловых скоростей раскладки и намотки в процессе -работы устройства импульсы с датчиков 5 и 6 через определенньш интервал времени, задаваемый программно, поступают на счетные входы программируемого таймера 9 синхронизатора 5, а с выхода синхронизатора 5 на вход блока 2 программного управления поступают коды, соответствующие считанному количеству импульсов.
15
20
31350096
а на другой вход блока 2 программного управления подаются импульсы только с датчика 4. В блоке 2 программного управления происходит обработка кодов и вычисление текущих значений скоростей намотки и раскладки.
В случае отклонения текущих значений угловых скоростей намотки и раскладки от расчетньпс значений, нимых в ПЗУ блока 2 программного управления, блок 2 программного управления корректирует код скорости раскладки на величину + П.
Данное значение ± Пр корректировки кода из ПЗУ блока 2 программного управления через кодовые выходы поступает на входы цифроаналогового преобразователя 13 синхронизатора 15, который формирует сигнал увеличения скорости. Этот сигнал подается на вход операционного усилителя 14 и через диодный оптрон 15 поступает на второй вход электропривода 3 раскладки. Двигатель электропривода 3 раскладки отрабатывает сигал рассогласования и устанавливает ребуемое для данного момента времеи, в соответствии с формулой (1), начение скорости раскладки. При поледующем считывании на каждом обооте катушки текущих значений сигнаов датчиков 4 и 6 блок 2 программноо управления непрерывно корректирует начение скорости раскладки, обеспеивая тем самым не соответствие расетному значению скорости намотки в соответствии с формулой (1) или (2).
Законы движения раскладчика форируются следующим образом.
В режиме реверса привод раскладки изменяет направление скорости от +(х)нц, до - нач. Команда на реверс привода раскладки вырабатывает- ся блоком 2 программного управления за угол dр до завершения последнего витка. Величина угла oip является функцией диаметра провода, скорости раскладки и характеристик привода и определяется выражением
30
ти пр вх с по
ни ны 2 ва ко ра го зн на те фо
ус по
2g ра же . дв пр
ци .ка за ка
35 оп да ре на ре
ра чи до пр ты
45 ле сл уг да ва
П
н
(3)
где, W
где Т - электрическая постоянная времени;
5
0
Ч tp частота реверса, время реверса. Значение угла dр для различных
типов катушек хранится в ПЗУ блока 2 программного управления. На третий вход блока 2 программного управления с выхода программируемого таймера 7 поступает код угла положения катушки,
В момент равенства кодов значений угла положения катушки с расчетным значением, хранимым в ПЗУ, блок 2 программного управления вырабатывает команду на реверс двигателя, которая поступает в электропривод 3 раскладки. Из ПЗУ блока 2 программного управления код, соответствуюш,ий значврию скорости поступает на вход цифроаналогового преобразователя 13 синхронизатора 5, который формирует аналоговый сигнал. Этот
усилитель 14 и диодный оптрон 15, поступает на вход электропривода 3
раскладки, где усиливается до напряения, соответствующего частоте lAuKc обеспечивает реверс двигателя. Данный цикл повторяется при каждой команде на реверс.
В режиме перехода из секции в секцию происходит перемещение раскладчи- ка на толщину щечки каркаса (не показаны) за один оборот поводка (не показан) .
Бремя перехода из секции в секцию
определяется типом двигателя, передаточным отношением, шагом винта (передачи) , толщиной щечки и скоростью намотки. Для осуществления этого режима необходимо электроприводу 3
раскладки придать ускорение, обеспечивающее изменение скорости от 3-гск Команда на режим перехода провода из секции в секцию вырабатывается блоком 2 программного управения за угол d до завершения по-, следнего витка в секции. Величина угла с -и определяется по сигналам атчика 6 и предварительно рассчитывается по формуле
п AI/I1 П
(5)
- угол начала ускорения привода раскладки;
- число, зависящее от крутящего момента двигателя и момента инерции движущихся
1 - передаточное отношение} 1 толщина щечки; К - шаг винта..
Расчетные значения углов ot,, для различных типов катушек хранятся в ПЗУ блока 2 программного управления. На вход блока 2 программного управления пост упает код угла с выхода программируемого таймера 7, который по команде от блока 2 прот раммного управления до завершения последнего витка считывает количество импульсов, равное расчетному значению угла .
В момент равенства значений кодов угла, хранимых в ПЗУ блока 2 программного управления, и поступившего из программируемого таймера 7, блок 2 программного управления вырабатывает команду на начало ускорения раскладчика. По этой команде код скорости из ПЗУ блока 2 программного управления поступает на цифроаналоговый преобразователь 13 синхронизатора 5, который формирует аналоговый сигнал. Этот сигнал пода.- ется на операционный усилитель 14, с выхода которого через диодный оптрон 15 сигнал поступает на вход электропривода 3 раскладки, где уси- ливается до напряженияj соответству- ош;его двигатель
тель начинает вращаться с угловой скоростью и)
По завершении последнего витка блок 2 программного управления, на .вход которого поступает сигнал с датчика 6, вырабатьшает сигнал на уменьшение напряжения до величины, соответствующей скорости оО,, и двигатель переходит на первоначальный режим работы.
Формула изобретения
частоте tjj и подается на
результате этого двига
1, Устройство для управления на- м откой многослойных электрических катушек, содержащее электродвигатель катушки, вал которого кинематически связан с импульсным датчиком скорости и углового положения катушки, и блок программного управления, первым выходом подключенный к первому входу электропривода раскладки, отличаюш;ееся тем, что.
10
15
20
13500966 .
с целью повышения качества намотки путем синхронизации скоростей намотки катушки и раскладки провода, оно снабжено импульсным датчиком скорости раскладки, синхронизатором и программируемым таймером, при этом первый вход блока программного управления соединен с первым выходом импульсного датчика скорости и углового положения катушки, вторым выходом подключенного к первым входам программируемого таймера и синхронизатора, второй и третий входы которого подключены соответственно к второму выходу блока программного управления и к выходу импульсного датчика скорости раскладки, а пер- вый и второй выходы синхронизатора связаны соответственно с вторыми входами блока программного управления и электропривода раскладчика, причем выход программируемого таймера соединен с третьим входом бло- 2с ка программного управления, третьим выходом подключенного к второму входу программируемого таймера.
2. Устройство по п. 1, отличающееся тем, что синхронизатор состоит из программируемого таймера, триггеров, цифроаналогово- го преобразователя, операционного усилителя, диодного оптрона и элементов И-НЕ и НЕ, при этом объединенные выходы элементов НЕ и выход диодного оптрона являются соответственно первым и вторым выходами синхронизатора, выходы триггеров через цифроаналоговый преобразователь и операционный усилитель связаны с входом диодного оптрона, выходы программируемого таймера соединены соответственно с входами первого и второго элементов НЕ, а выход элемента И-НЕ подключен к разрешающим входам программируемого таймера, причем первый счетный вход программируемого таймера является первым входом синхронизатора, подключенные к одной шине тактовый и информационные входы триггеров, входы элемента И-НЕ и входы данных чтения, записи, выборки и адресные входы программируемого таймера являются вторым.входом синхронизатора, а второй счетный вход 55 программируемого таймера является третьим входом синхронизатора.
30
35
40
45
50
Редактор А.Шандор
Составитель К.Кисин Техред Л.Сердюкова
Заказ 5222/20
Тираж 591Подписное
.ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113033, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
IP
2p 3p ЧР 5c
Й
(/f
up
P 8,
-. ЙЛ U, -I
- -Щ
l-yP
15
SV-H
M
ЧСУ
0
Unum
бымдг
.odl
Корректор А.Тяско
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
| Устройство для управления намоточным станком | 1989 |
|
SU1817061A1 |
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Система автоматического управления процессом прессования торфобрикетов | 1989 |
|
SU1691138A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
Изобретение относится к области автоматических устройств для управления процессами намотки длинномер- ных материалов, преимущественно провода. Цель изобретения - повьшзение качества намотки путем синхронизации скоростей намотки и раскладки провода. Для поддержания заданных угловых скоростей раскладки и намотки (эти параметры определяются расчетным путем) сигналы с импульсных датчиков 4,6 скорости и углового положения катушки и скорости раскладки через определенный интервал времени, задаваемый программно, поступают на счетные входы программируемого таймера синхронизатора 5. С выхода синхронизатора 5 на вход блока 2 программного управления поступают коды, соответствующие считанному количеству импульсов. В блоке 2 происходит обработка кодов и вычисление текущих значений скоростей намотки и- раскладки. В случае отклонения текущих значений угловых скоростей намотки и раскладки от расчетных зна- чений, хранимых fe ПЗУ блока 2, последний выдает сигналы на устранение возникших сигналов рассогласования. 1 з.п. ф-лы, 2 ил. СО ел со ffi
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
