Изобретение относится к расчетным устройствам и позволяет уменьшить время обработки радиолокационной и гидролокационной информации за счет автоматизации решения задач, касающихся векторных треугольников.
Известен прибор для расчета электрических цепей СВЧ, содержащий основание, на котором в направляющих размещен ползунок и два поворотных указателя, одними концами закрепленных на оси, установленной на ползуне перпендикулярно к плоскости основания.
Недостатком этого устройства является невозможность решения векторных треугольников.
Известен прибор .ля решения штурманских задач, содержащий неподвижное основание, на которое нанесены система
концентрических окружностей, указанные индексы и сетка координатных линий, в центре системы концентрических окружностей закреплен на оси поворотный диск, выполненный из прозрачного материала и снабженный градусной шкалой, на оси закреплена система из четырехмасштабных линеек.
Недостатком прибора является сложность построения векторных треугольников при решении штурманских задач, а также невозможность решения гидролокационных задач.
Известен прибор для решения штурманских задач, содержащий неподвижное основание-планшет, на которое нанесена система концентрических окружностей, и систему из двух масштабных , распоХ|
00
ел о о
СП
ложенных параллельно друг другу и шар- нирно скрепленных посредством двух тяг.
Недостатки описанного выше прибора присущи и известному прибору.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому техническому решению является маневренный Планшет, содержащий основание с нанесенной на него шкалой, диск со шкалой, нанесенной на его поверхность, и две линейки.
Недостатком этого планшета является то, что с его помощью можно решать только задачи по маневру судов. Тогда как решать рыбопоисковые задачи с его помощью не представляется возможным.
Целью изобретения является расширение функциональных возможностей за счет обеспечения возможности решения прямо- и косоугольных треугольников.
Поставленная цель достигается тем, что в маневренный планшет для решения радиолокационных задач и гидролокационных задач, содержащий основание с нанесенной на него шкалой, диск и две линейки, дополнительно введены подвижное кольцо с двумя шкалами противоположной оцифровки, направляющие стержни и малый диск с дополнительной шкалой, причем дисквыполнен прозрачным и неподвижным с центральным отверстием, в котором установлена ось-винт, на которой шарнирно за- креплены направляющее стержни, на каждом из которых шарнирно установлены с возможностью продольного перемещения вдоль стержня соответствующая ему линейка, конец первого направляющего стержня неподвижно закреплен на подвижном кольце, а на оси шарнира линейки, установленной на втором направляющем стержне подвижно установлен малый диск с дополнительной шкалой, кроме того,между основанием и прозрачным неподвижным диском установлен сменный планшет со шкалами, а на линейках нанесены шкалы расстояния.
Сопоставительный анализ с прототипом показывает, что заявляемый маневренный планшет отличается тем, что в него дополнительно введены подвижное кольцо со шкалами, направляющие стержни и малый диск. Таким образом, заявленный маневренный планшет соответствует критерию изобретения новизна.
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию существенные отличия.
На фиг. 1 - изображен маневренный планшет, общий вид.
На фиг. 2 - то же, вид сбоку;
На фиг. 3 пример решения радиолокационных задач.
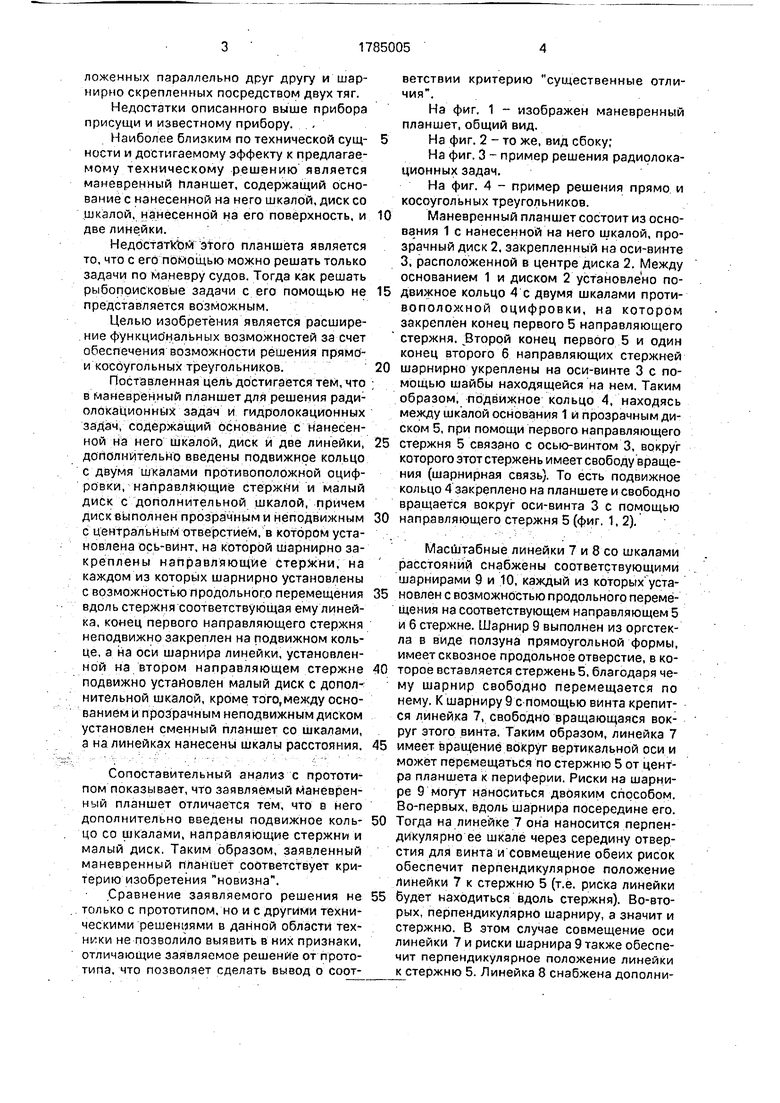
На фиг. А - пример решения прямо и косоугольных треугольников.
Маневренный планшет состоит из основания 1 с нанесенной на него шкалой, прозрачный диск 2, закрепленный на оси-винте 3, расположенной в центре диска 2. Между основанием 1 и диском 2 установлено подвижное кольцо 4 с двумя шкалами противоположной оцифровки, на котором закреплен конец первого 5 направляющего стержня, Второй конец первого 5 и один конец второго 6 направляющих стержней
шарнирно укреплены на оси-винте 3 с помощью шайбы находящейся на нем. Таким образом, подвижное кольцо 4, находясь между шкалой основания 1 и прозрачным диском 5, при помощи первого направляющего
стержня 5 связано с осью-винтом 3, вокруг которого этот стержень имеет свободу вращения (шарнирная связь). То есть подвижное кольцо 4 закреплено на планшете и свободно вращается вокруг оси-винта 3 с помощью
направляющего стержня 5 (фиг, 1,2).
Масштабные линейки 7 и 8 со шкалами расстояний снабжены соответствующими шарнирами 9 и 10, каждый из которых установлен с возможностью продольного перемещения на соответствующем направляющем 5 и б стержне. Шарнир 9 выполнен из оргстекла в виде ползуна прямоугольной формы, имеет сквозное продольное отверстие, в которое вставляется стержень 5, благодаря чему шарнир свободно перемещается по нему. К шарниру 9 с помощью винта крепится линейка 7, свободно вращающаяся вокруг этого винта. Таким образом, линейка 7
имеет вращение вокруг вертикальной оси и может перемещаться по стержню 5 от центра планшета к периферии. Риски на шарнире 9 могут наноситься двояким способом. Во-первых, вдоль шарнира посередине его.
Тогда на линейке 7 она наносится перпендикулярно ее шкале через середину отверстия для винта и совмещение обеих рисок обеспечит перпендикулярное положение линейки 7 к стержню 5 (т.е. риска линейки
будет находиться вдоль стержня). Во-вторых, перпендикулярно шарниру, а значит и стержню. В этом случае совмещение оси линейки 7 и риски шарнира 9 также обеспечит перпендикулярное положение линейки к стержню 5. Линейка 8 снабжена дополнительным малым диском 11 со шкалой, который подвижно установлен на шарнире 10.
В фиг. 1, 3, 4 на малом диске 11 из-за ограниченности его размеров не показаны оцифровка шкалы направлений по окружности диска и концентрические окружности расстояний (кольца дальности). Последние фактически на планшете находятся на диске 11 в масштабе, соответствующем масштабу расстояний планшета через один кабельтов (один кабельтов - десятая часть мили). Радиус диска 2-е мили, оцифровывается только окружность, равная одной миле. Шкала направлений по окружности диска на рисунке отградуирована через 10° (от 0° до 350°), а фактически на планшете разбивается через 1° и оцифровывается через 10°. Через каждые 10° от центра диска проводятся радиальные прямые. На рисунках это
не показано из-за ограниченности из размеров Между основанием 1 и диском 2 размещен планшет 12 со шкалами 13.
Работа предлагаемого прибора может
быть пояснена примерами решения задач: на маневрирование по данным судовой радиолокационной станции и решения треугольников по данным гидролокатора. На фиг, 3 приведено решение примера 1. На
фиг. 4 приведено решение примера 2 (в верхней части планшета) и примера 3 в нижней его части.
Пример 1. Исходные данные: курс нашего судна Кн 70°, скорость нашего судна VH 17 узлов, Интервал между наблюдениями Т 6,0 минут. Заданная дистанция расхождения Д3ад 2,0 мили. Обнаружены 3 цели. Данные целей указаны в нижеприведенной таблице,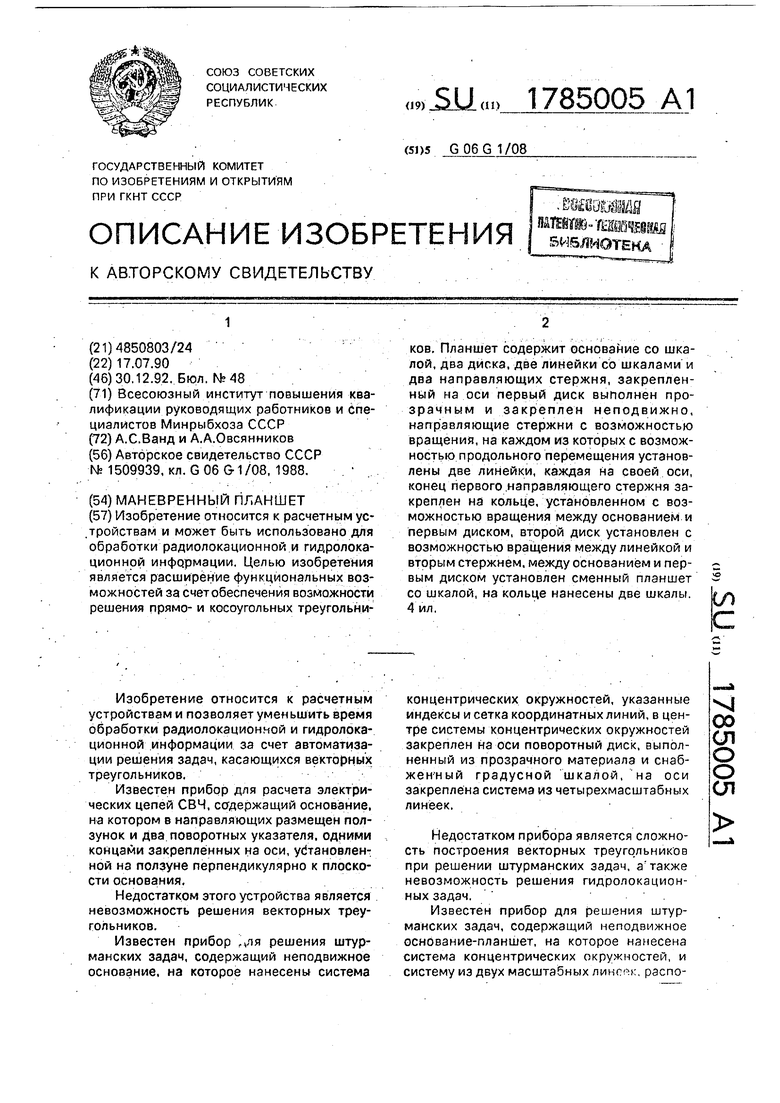


| название | год | авторы | номер документа |
|---|---|---|---|
| Маневренный планшет | 1987 |
|
SU1509939A1 |
| Прибор для решения штурманских задач | 1982 |
|
SU1137483A1 |
| Вычислительный рыбопромысловый прибор | 1977 |
|
SU737959A1 |
| Прибор для решения штурманских задач | 1982 |
|
SU1068948A1 |
| Планшет Подорова | 1987 |
|
SU1451728A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| Прибор для определения курсовых углов корабля | 1960 |
|
SU140227A1 |
| ЭЛЛИПСОГРАФ | 2000 |
|
RU2193491C2 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ ПЕРСПЕКТИВНЫХ ИЗОБРАЖЕНИЙ | 1950 |
|
SU91137A1 |

Изобретение относится к расчетным ус- .тройствам и может быть использовано для обработки радиолокационной и гидролокационной информации. Целью изобретения является расширение функциональных возможностей за счет обеспечения возможности решения прямо- и косоугольных треугольников. Планшет содержит основание со шкалой, два диска, две линейки со шкалами и два направляющих стержня, закрепленный на оси первый диск выполнен прозрачным и закреплен неподвижно, направляющие стержни с возможностью вращения, на каждом из которых с возможностью продольного перемещения установлены две линейки, каждая на своей оси, конец первого направляющего стержня закреплен на кольце, установленном с возможностью вращения между основанием и первым диском, второй диск установлен с возможностью вращения между линейкой и вторым стержнем, между основанием и первым диском установлен сменный планшет со шкалой, на кольце нанесены две шкалы. 4 ил. 00 с
где П - пеленг на цель в градусах;
Д - расстояние до цели в милях.
Вращая подвижное кольцо 4, закрепленный конец первого 5 направляющего стержня устанавливают против отметки 70° по шкале основания 1, На шкале дополни- тельного малого диска 11 стеклографом делается отметка вектора своей скорости, соответствующая Кн 70° и VH 17 уз. Планшет готов к работе, На прозрачном диске 2 стеклографом отмечают позиции целей А, В и С в соответствии с таблицей как в начальный момент так и через 6,0 минут - АЛ ВГ и СГ.
Принцип анализа ситуации заключается в следующем.,
Цели А и В по мере сближения с нами остаются на одном и том же пеленге, т.е. существует опасность столкновения с ними. Поэтому обе они считаются опасными. Пеленг цели С, находящейся справа, по мере сближения увеличивается, т.е. цель пройдет у нас по корме (на рисунке линия относительного движения ее обозначена пунктиром). Таким образом, она наименее опасна. Наиболее опасной является цель А, поскольку находится ближе других и скорость ее сближения больше, чем цели В, По международным правилам предупреждений столкновений судов в море (МППСС-72) мы должны выполнить маневр для расхождения с этими целями (при изменении курса) поворотом вправо. Но при этом линия относительного движения цели
С будет смещаться к центру планшета, т.е. она будет становиться более опасной чем цели А и В и для того, чтобы обеспечить расхождение с ней на заданном расстоянии в 2,0 мили потребуется сделать поворот больше, чем это необходимо для целей А и В. Поэтому цель С считается потенциально опасной, т.е. будучи в начальной стадии ситуации не опасной или менее опасной она становится таковой в результате предпринимаемого маневра для расхождения с другой целью. Для определения элементов ее движения конец вектора своей скорости, отмеченный на диске 11, устанавливают в точке С так, чтобы он был параллелен направляющему стержню 5, замечают по шка- ле основания 1 отсчет, указываемый направляющим стержнем б, а затем положение диска 11 уточняется таким образом, чтобы отсчет по его шкале напротив стержня 6 соответствовал отсчету того же стержня по шкале оснований 1. В примере он равен 152°, что обеспечивает параллельность векторов своей скорости. Затем ось линейки 8 совмещается с позицией цели Ci, в результате получается треугольник скоростей, в котором ОС - вектор нашей скорости VH, OCi (из точки 0 в точку СГ) - вектор скорости цели С (VC), вектор CCi (из точки С в точку d)- вектор относительной скорости Vo, находящийся на линии относительного движения (ЛОД) цели С. По оси линейки 8 снимаем со шкалы диска 11 курс цели С равный 3°, а по кольцам дальности этого днека в точке СГ снимаем ее скорость. В примере она равна 20 узлам (на кромке диска).
При необходимоеги аналогично опреде- ляют элементы движения целей А и В. Далее по линии относительного движения цели С на прозрачном диске 2 стеклографом наносят упрежденную точку My через 3 минуты после позиции СГ. Линейку 7 устанавливают так, чтобы осевая линия ее, проходя через точку My, являлась касательной к окружности равной 2-м милям. Получаем ожидаемую линию относительного движения и проводим ее стеклографом на прозрачном диске 2, Затем перемещаем линейку 7 параллельно ожидаемой линии относительного движения в точку Ct и проводим вправо от нее линию параллельную ожидаемой линии относительного движения. Конец вектора своей скорости на малом диске 11 устанавливаем в точку С, как описано выше и по шкале этого диска 11 напротив точки пересечения окружности своей скорости с ожидаемой линией относительного движения снимаем курс маневра Км 145°.
Пример 2. Решение гидролокационной задачи.
Исходные данные: гидролокатором обнаружен косяк на расстоянии Дк 1000 метров при угле наклона вибратора / 30°, Необходимо определить глубину залегания косяка (Нк) от поверхности моря.
На шарнире 9 линейки 7 нанесена риска расположения перпендикулярно стержню 5 для возможности фиксирования линейки 7 в этом положении. Оставляем прежнее положение стержня 5. Находим окружность, соответствующую расстоянию 1000 метров и по кольцу 4 на курсовом угле 30° правого борта делаем на ней отметку стеклографом. Линейку 7 устанавливаем перпендикулярно стержню 5, совмещая ось линейки с риской на шарнире 9 и перемещаем ее на отметку соответствующую Дк 1000 метров и /3 30°. По шкале линейки 7 от центра шарнира 9 до косяка снимаем отсчет глубины косяка Нк 500 метров.
Пример 3. Решение косоугольного треугольника.
Исходные данные: одна сторона треугольника равна 1000 метров, другая - 1610 метров и угол между ними равен 35°.
Определить величину третьей стороны и двух других углов.
Направляющий стержень б устанавливают на отсчет 180° по подвижному кольцу 4,
а ось шарнира 10 на расстояние 1000 метров от центра планшета. 0° шкалы диска 11 устанавливают на стержень б в сторону центра планшета. Ось линейки 8 разворачивают по шкале диска 11 на 35° вправо и по шкале этой
линейки откладывают 1610 метров,
Определяют третью сторону как расстояние от центра планшета до полученной точки - 1000 метров. По внутренней шкале подвижного кольца 4 угол от этого направления равен 110°. Следовательно третий угол будет равен 35°.
Технико-экономический эффект от применения предлагаемого маневренного планшета заключается в повышении скорости обработки информации при решении ра- диолокационных и гидролокационных задач, а также в расширении круга задач, связанных с решением прямоугольных и косоугольных треугольников, что приводит к
повышению производительности труда судоводителя.
Формула изобретения Маневренный планшет, содержащий основание с нанесенной на нем шкалой, первый диск и две линейки, отличающий- с я тем, что, с целью расширения функциональных возможностей за счет обеспечения возможности решения прямо- и косоугольных треугольников, первый диск выполнен
прозрачным и установлен неподвижно на оси, установленной в центре основания, на оси закреплены с возможностью вращения один над другим два направляющих стержня, на каждом из которых установлены, каждая на отдельной оси, с возможностью продольного перемещения две линейки со шкалой, конец первого направляющего стержня закреплен на кольце, установленном с возможностью вращения между основанием и первым диском, между линейкой и вторым стержнем на оси, установленной на втором стержне, закреплен с возможностью вращения второй диск со шкалой, между основанием и первым диском установлен
сменный планшет со шкалой, на кольце нанесены две шкалы противоположной оцифровки.
о
03
| Маневренный планшет | 1987 |
|
SU1509939A1 |
