, (54) ВЫЧИСЛИТЕЛЬНЫЙ РЫБОПРОМЫСЛОВЫЙ ПРИБОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Маневренный планшет | 1987 |
|
SU1509939A1 |
| Маневренный планшет | 1990 |
|
SU1785005A1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| Тренажер судоводителя промыслового судна | 1980 |
|
SU902050A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| Прибор для определения курсовых углов судна для циркуляции по многоугольнику, например, при замете снюрревода | 1945 |
|
SU91340A1 |
| Прибор для определения курсовых углов корабля | 1960 |
|
SU140227A1 |
| Автоматический поправочник при стрельбе по карте (планам местности) | 1926 |
|
SU7699A1 |
| Планшет Подорова | 1987 |
|
SU1451728A1 |
| Инсоляционный прибор | 1991 |
|
SU1831702A3 |
1
Изобретение относится к вычисли. тельной технике и может быть испопь; зовано на ксяиельковом лове рыбы.
Известно, что при. облове кошелькоВьм неводом быстрых подвижных косяков, до 30-40% заметов оказываются пустыми, так как рыба успевает выходить из обметываемого пространства, В этих условиях очень важно анализировать проведенные заметы, находить сяиибки в маневрировании судна, определять оптимальные траектории замета для типичных случаев 1 .
Наиболее близок к предлагаёмсялу штурманский вычислительный рыббпромысловый прибор, содержащий прозрачный планшет с нанесенными на его Поверхность кольцами дальности и раму, в которой закреплены азимутальный круг и прозрачный диск. В центре прозрачного диска закреплена первая ось, на которой установлен поворотный указатель курса {2,
Недостатком известнЬго прибора является низкое быстродействие при решении задач по маневрированию судна при ловле рыбы
Цель изобретения - повышение быстродействия прибора.
Поставленная цель достигаетсй тем, что в прибор введены измерительная планка и гибкая линейка, которые одними концами прикреплены к указателю курса, а другими соединены .цруг с другом, вторая ось и рейка, котора я закреплена «а первой оси, и в которой выполнены продольный паз, в котором подвижно
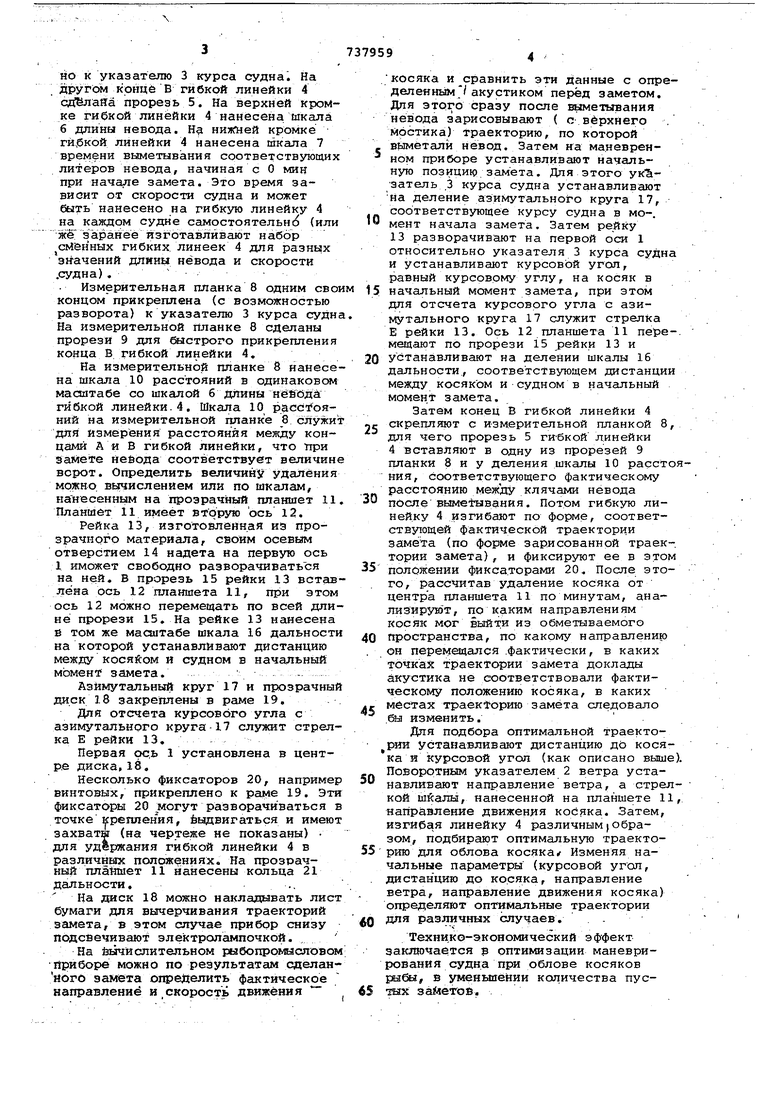
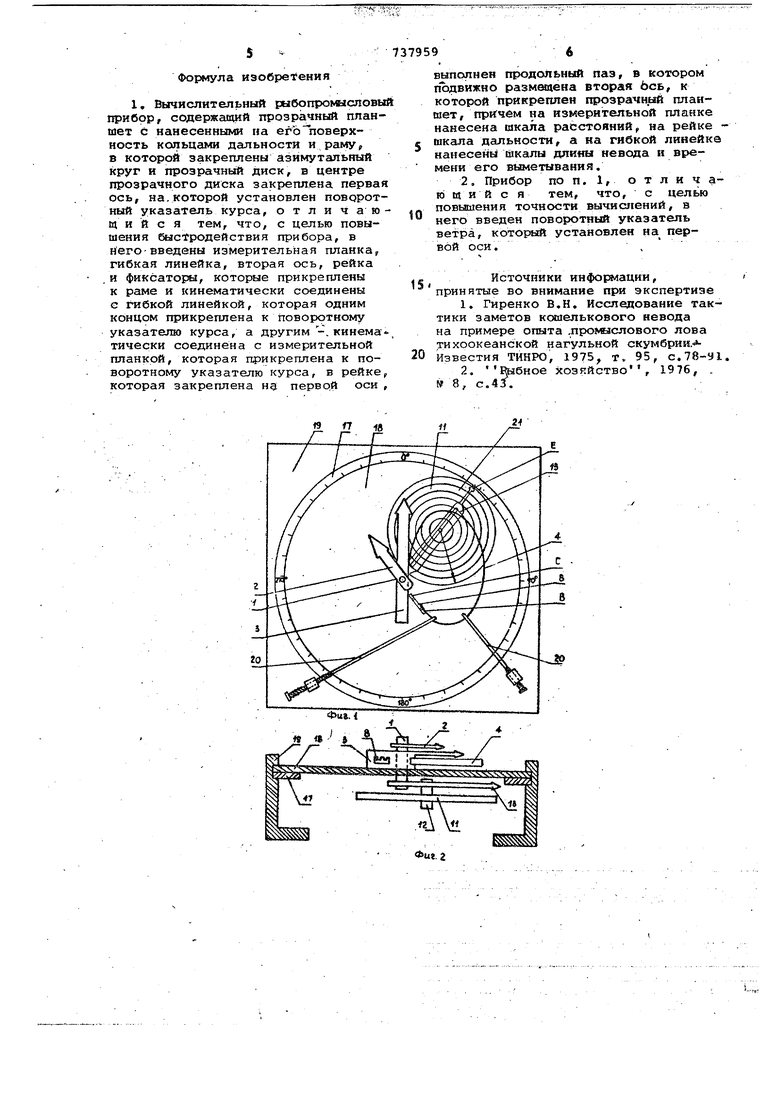
На фиг.1 представлена схема предлагаемого устройства, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З - измерительная планка и гибкая линейка на фиг.4 - рейка.
На первой оси Г размещены с воз- . можностью свободного зависимого разворота поворотные артель 2 ветра .и указатель 3 курса судна.Гибкая линейка 4 одним концом А прикреплена съемно к указателю 3 курса судна. На flpyroiM крице В гибкой линейки 4 прорезь 5. На верхней кромке гибкой линейки 4 нанесена шкала 6 длины невода. Н нижней кромке линейки 4 нанесена шкала 7 времени выметывания соответствующих литеров невода, начиная с О мин при нача-ле замета. Это время зависит от скорости судна и может быть нанесено на гибкую линейку 4 на каждом судне самостоятельн (или жеsaipaHee изготавливают набор сменных гибких, линеек 4 для разных значений длины невода и скорости .судна) .
Измерительная планка 8 одним свои концом прикреплена (с возможностью разворота) к указателю 3 курса судна На измерительной планке 8 сделаны прорези 9 для аастрого прикрепления конца В гибкой линейки 4.
На измерительной планке 8 нанесена шкала 10 расстояний в одинаковом масштабе со шкалой б длины нёйодй гибкой линейки. 4. Шкала 10 расстояний на измерительной планке 8 служит для измерения расстояния между концами Аи В гибкой линейки, что гфи Замете небода соответствует величине ворот. Определить величину удаления можно ВЕ1числением или по шкалам, нанесенным на прозрачный планшет 11. Планшет 11 имеет вторую ось 12.
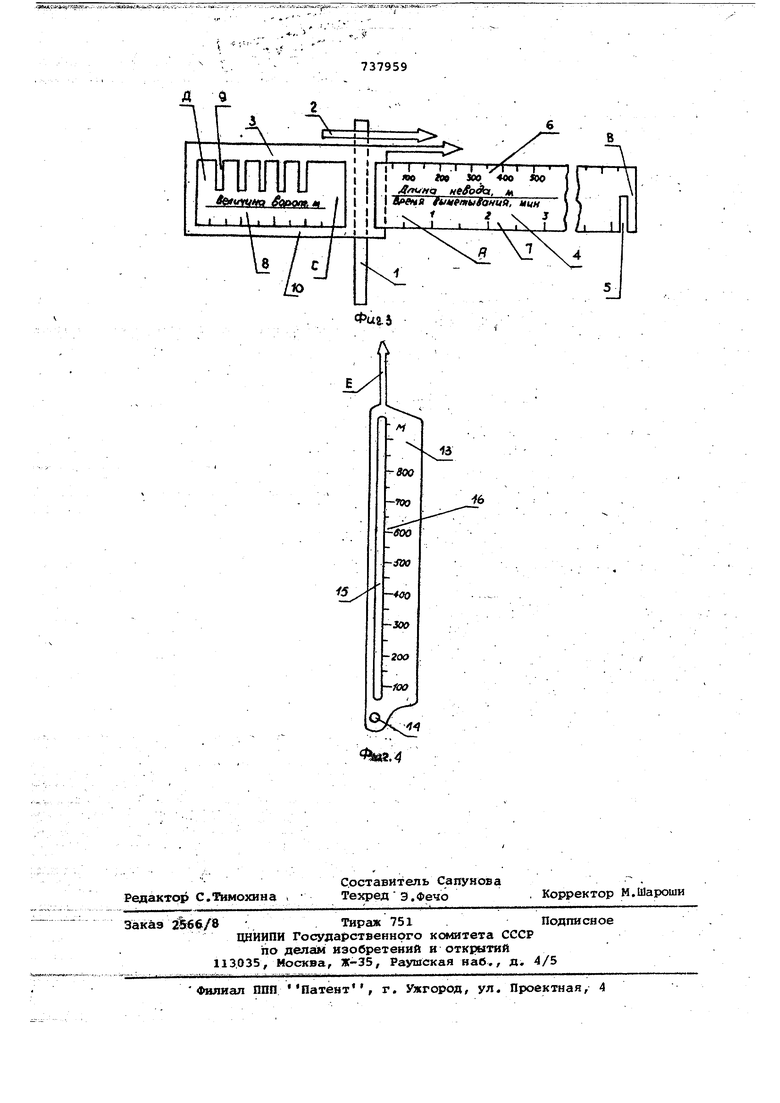
Рейка 13, изготовленная иэ прозрачного материала, своим осевьям отверстием 14 надета на первую ось I иможет свободно разворачиваться на ней. В прорезь 15 рейки 13 вставлена ось 12 планшета 11, при этом ось 12 можно перемещать по всей длине прорези 15. На рейке 13 нанесена в том же масштабе шкала 16 дальности на которой устанавливают дистанцию между косяйом и судном в начальный MOMCHf замета. Азимутальный круг 17 и прозрачный диск 18 закреплены в раме 19,
Для отсчета курсового угла с азимутального круга-17 служит стрелка Е рейки 13. Первая ос,ь 1 установлена в центре диска,18.
Несколько фиксаторов 20, например винтовых, прикреплено к раме 19. Эти фиксаторы 20 могут разворачиваться в точке крепления, йьвдвигаться и имеют захвати (на чертеже не показаны) для удержания гибкой линейки 4 в
различных положениях. На прозрачный плайшет 11 нанесены кольца 21 дальности..,
На диск 18 можно накладывать лист бумаги для вычерчивания траекторий замета, в этом случае прибор снизу подсвечивают электролампочкой.
На Ёычйслительном рыбопромысловом приборе можно по результатам сделанного эамета определить фактическое направление и скорость движения
косяка и сравнить эти данные с определенньм / акустиком перёд заметом. Для этого сразу после выметывания невода зарисовывают ( с верхнего Мостика) траекторию, по которой вьлмёталй невод. Затем на маневренном приборе устанавливают начальную позицик). замета. Для этого указатель .3 курса судна устанавливают на деление азимутального круга 17, соответствующее курсу судна в мо-. мент начала замета. Затем рейку 13 разворачивают на первой оси 1 относительно указателя 3 курса судна и устанавливают курсовой угол, равный курсовому углу, на косяк в начальный момент замета, при этом для отсчета курсового угла с азимутального круга 17 служит стрелка Е рейки 13. Ось 12 планшета 11 перемещают по прорези 15 рейки 13 и устанавливают на делении шкалы 16 дальности, соответствующем дистанции между косяком и судном в начальный момен.т замета.
Затем конец В гибкой линейки 4 скрепляют с измерительной планкой 8, для чего прорезь 5 гибкой линейки 4 вставляют в одну из прорезей 9 планки 8 и у деления шкалы 10 расстония, соответствующего фактическому расстоянию между клячами невода после выменивания. Потом гибкую линейку 4 изгибают по форме, соответству ощей фактической траектории замёта (по форме зарисованной траектории замета), и фиксируют ее в этом положении фикса.торами 20. После этого, рассчитав удаление косяка от центра планшета 11 по минутам, анализируют, по каким направлениям косяк мог выйти из обметываемого Пространства, по какому направлению он перемещался .фактически, в каких точках траектории замета доклады акустика не соответствовали фактическому положению косяка, в каких траекГорию замета следовало .бы изменить.
Для подбора оптимальной траектории устанавливают дистанцию до косяка и курсовой угол (как описано выше Поворотным указателем 2 ветра устанавливают направление ветра, а стрелкой шйалы, нанесенной на планшете 11 направление движения косяка. Затем, изгибая линейку 4 различным Образом, подбирают оптимальную траекторию для облова косяка/ Изменяя начальные параметры (курсовой угол, дистанцию до косяка, направление ветра, направление движения косяка) определяют оптимальные траектории для различных случаев. .
Технико-экономический эффект заключается р оптимизации маневрирования судна при облове косяков рлбы, в уменьшении количества пустых: зайетов. .
Формула изобретения
выполнен продольный паз, в котором подвижно размещена вторая Ьсь, к которой прикреплен прозрачный планшет, причем на измерительной планке нанесена шкала расстояний, на рейке шкала дальности, а на гибкой линейка нанесены шкалы длины невода и времени его выметывания.
ч
Источники инфори1ации,
S принятые во внимание при экспертизе
на примере опыта ,про1лыслового лова тихоокеанской нагульной скумбрии.0Известия ТИНРО, 1975, т. 95, С.78-У1.
2,Шлбное хозяйство , 1976, . W 8, с,43.
Д d
737959
