(21)4278232/24-24.
(22)06.07.87
(46) 23.09.89. Бюл. № 35 (75) И.С.Подаров
(53)681 .3 (088.8)
(56) Авторское свидетельства СССР № 1049924, кл. G 06 G 1/08, 1982.
Авторское свидетельство СССР № 1451728, 1987.
(54)МАНЕВРЕННЫЙ ПЛАНШЕТ
(57) Изобретение относится к расчетным устройствам и позволяет уменьшить время обработки радиолокационной и гидроакустической информации за счет автоматизации решения задач, касающихся векторных треугольников.
(Целью изобретения является сокращение времени расчета. Два диска, снабженных градусными шкалами 7 и 8, соединены с помощью П-образной курсовой линейки 3 так, что верхний подвижный диск 4 имеет возможность фиксирования и изменения эксцентриситета относительно центра диска-основания 1. Нижняя часть П-образной линейки 3 соединена с помощью оси с центром основания 1, а в ее верхней части в продольном цазу 10 установлена с возможностью фиксированного перемещения и вращения ось 11, закрепленная в центре подвижного диска 4. В верхней
участи линейки 3, на которой нанесена ткала 15, шарнирно закреплена лнней18 1
(Л
г
СП
О
;о
У со
со
да
//
5
17
3- 15099394
ка дальности 13 таким образом, что , но основания 1, а диск 4 - относи- ось шарнира постоянно совпадает с тельно линейки 3. Планшет может быть осью основания. I. Линейка 3 имеет использован на судах для решения за- воэможность фиксирования относитель-тi дач маневрирования. 2 ип.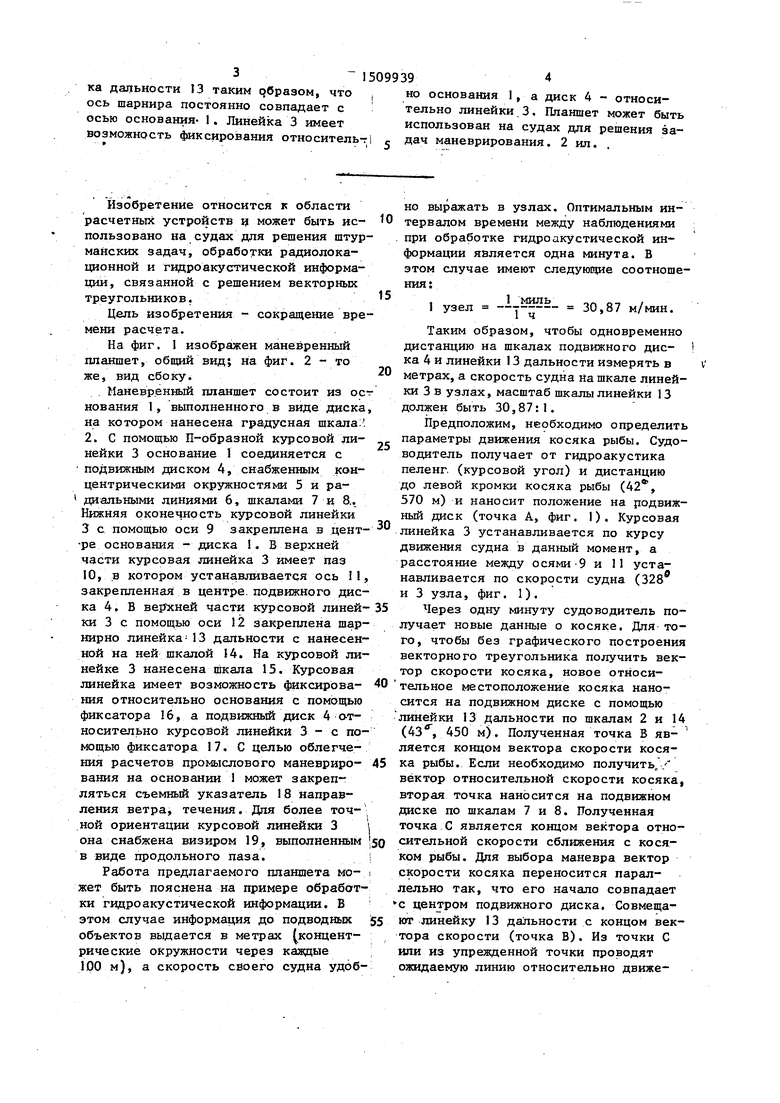

| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительный рыбопромысловый прибор | 1977 |
|
SU737959A1 |
| Маневренный планшет | 1990 |
|
SU1785005A1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| Прибор для определения курсовых углов корабля | 1960 |
|
SU140227A1 |
| Планшет Подорова | 1987 |
|
SU1451728A1 |
| Прибор для решения штурманских задач | 1982 |
|
SU1068948A1 |
| СПОСОБ КОНТРОЛЯ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ПОДВИЖНЫХ МОРСКИХ ОБЪЕКТОВ | 2021 |
|
RU2767150C1 |
| Тренажер судоводителя промыслового судна | 1980 |
|
SU902050A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2010 |
|
RU2452652C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПОСАДОЧНОЙ ВИДИМОСТИ ПРИ РАЗЛИЧНЫХ ВЫСОТЕ ОБЛАКОВ И ЯВЛЕНИЯХ ПОГОДЫ (ПЛАНШЕТ ОЦЕНКИ ПОСАДОЧНОЙ ВИДИМОСТИ ) | 2003 |
|
RU2267142C2 |
Изобретение относится к расчетным устройствам и позволяет уменьшить время обработки радиолокационной и гидроакустической информации за счет автоматизации решения задач, касающихся векторных треугольников. Целью изобретения является сокращение времени расчета. Два диска, снабженных градусными шкалами 7 и 8, соединены с помощью П-образной курсовой линейки 3 так, что верхний подвижный диск 4 имеет возможность фиксирования и изменения эксцентриситета относительно центра диска-основания 1. Нижняя часть П-образной линейки 3 соединена с помощью оси с центром основания 1, а в ее верхней части в продольном пазу 10 установлена с возможностью фиксированного перемещения и вращения ось 11, закрепленная в центре подвижного диска 4. В верхней части линейки 3, на которой нанесена шкала 15, шарнирно закреплена линейка дальности 13 таким образом, что ось шарнира постоянно совпадает с осью основания 1. Линейка 3 имеет возможность фиксирования относительно основания 1, а диск 4 - относительно линейки 3. Планшет может быть использован на судах для решения задач маневрирования . 2 ил.
Изобретение относится к области расчетных устройств ч может быть использовано на судах для решения штурманских задач, обработки радиолокационной и гидроакустической информации, связанной с решением векторных треугольников.
Цель изобретения - сокращение времени расчета.
На фиг. I изображен маневренный планшет, общий вид; на фиг. 2 - то же, вид сбоку.
Маневренный планшет состоит из ос-г нования 1, выполненного в виде диска, на котором нанесена градусная шкала: . 2. С помощью П-образной курсовой линейки 3 основание 1 соединяется с подвижным диском 4, снабженным концентрическими окружностями 5 и ра- диальными линиями 6, шкалами 7 и 8.. Нижняя оконечность курсовой линейки 3 с помощью оси 9 закреплена в дент- ре основания - диска I. В верхней части курсовая линейка 3 имеет паз 10, в котором устанавливается ось М, закрепленная в центре, подвижного диска 4. В верГхней части курсовой линейки 3 с помощью оси 12 закреплена шар- нирно линейка-13 дальности с нанесенной на ней щкалой 14. На курсовой линейке 3 нанесена шкала 15. Курсовая линейка имеет возможность фиксирования относительно основания с помощью фиксатора 16, а подвижньй дщск 4 о-т- носительно курсовой линейки 3-е помощью фиксатора 17. С целью облегчения расчетов промыслового маневрирования на основании 1 может закреп ляться съемный указатель 18 направления ветра, течения. Для более точ- , ной ориентации курсовой линейки 3 она снабжена визиром 19, выполненным в виде продольного паза.
Работа предлагаемого планшета моет быть пояснена на примере обработки гидроакустической информации. В этом случае информация до подводных объектов вьщается в метрах (концент- рические окружности через калдые ШО м), а скорость сйоего судна удоб0
5
0
5
0
5
0
5
0
5
но выражать в узлах. Оптимальным интервалом времени между наблюдениями . при обработке гидроакустической информации является одна минута. В этом случае имеют следующие соотношения:
,1 миль от /
1 узел -т 30,87 м/мин.
Таким образом, чтобы одновременно дистанцию на шкалах подвижного дне- 1 ка 4 и линейки 13 дальности измерять в метрах, а скорость судна на шкале линейки 3 в узлах, масштаб шкалы линейки 13 должен быть 30,87:1.
Предположим, необходимо определить параметры движения косяка рыбы. Судоводитель получает от гидроакустика пеленг, (курсовой угол) и дистанцию до левой кромки косяка рыбы (42, 570 м) и наносит положение на родвиж- ный диск (точка А, фиг. 1). Курсовая линейка 3 устанавливается по курсу движения судна в данный момент, а расстояние между осями-9 и 11 устанавливается по скорости судна (328 и 3 узла, фнг. 1).
Через одну минуту судоводитель получает новые данные о косяке. Для того, чтобы без графического построения векторного треугольника получить вектор скорости косяка, новое отНоси тельное местоположение косяка наносится на подвижном диске с помощью линейки 13 дальности по шкалам 2 и 14 (43, 450 м). Полученная точка В является концом вектора скорости косяка рыбы. Если необходимо получить. / вектор относительной скорости косяка, вторая точка наносится на подвижном диске по шкалам 7 и 8. Полученная точка С является концом вектора относительной скорости сближения с косяком рыбы. Для выбора маневра вектор скорости косяка переносится параллельно так, что его начало совпадает
С центром подвижного диска. Совмещают линейку 13 дальности с концом вектора скорости (точка В). Из точки С или из упрежденной точки проводят ожидаемую линию относительно движения. Если принято решение маневрировать изменением курса, то курсовую линейку 3 поворачивают, не изменяя расстояния между осями II и 12, удерживая линейку 13 дальности так, что она передвигается вдоль конца векто ра скорости косяка (точка В). Курсовая линейка 3 поворачивается до тех пор, пока линейка 13 дальности не займет положение, параллельное ожидаемой линии относительно движения (.ОЛОД). Угол .отворота курсовой линейки 3 показывает величину отворота судна. При маневрировании скоростью аналогичным образом добиваются параллельности линейки дальности ОЛОД при неизменной ориентации курсовой линейки и изменении расстояния
1509939
проводить обработку информации при ориентации по северу и по курсу в режиме истинных и относительных век- - торов скорости объектов.
Формула изобретения
Маневренный планшет, содержащий 0 основание с нанесенной на него шкалой, диск с шкалой, нанесенной на его поверхность, две линейки, первая линейка выполнена с пазом, о т л и - , чающийся тем, что, с целью t5i сокращения времени расчета, первая .пинейка .выполнена П-образчой, нижняя- часть линейки подвижно закреплена на оси в центре основания, в пазу первой линейки установлена с возможмежду осями 11 и 12. При комбиниро20 -ностью фиксированного перемещения отванном маневре изменяют и направление линейки 3 и расстояние между осями 11 и 12.
Таким же образом .можно получить векторы скорости судов-целей и выбрать маневр по определяющей цели при расхождении судов в ограниченную видимость. При этом интервал времени общепринятый в практике судовождения, 6 мин, скорость в узлах, дистанция в милйх кабельтовых, а масштаб шкалы 15 - 10: 1.
Предлагаемьй планшет позволяет
носительно указанного паза ось диска, закрепленная в его центре, относительно которой диск имеет возможность фиксированного вращения, вторая ли25 нейка поворотно соединена с первой линейкой осью, положение которой постоянно совпадает с осью основания, первая линейка снабжена двумя фиксаторами, первый из которызг позволяет
30 фиксировать линейку относительно основания, а второй - относительно диска, первая линейка снабжена визиром, I выполненным в виде паза.
1509939
проводить обработку информации при ориентации по северу и по курсу в режиме истинных и относительных век- торов скорости объектов.
Формула изобретения
Маневренный планшет, содержащий основание с нанесенной на него шкалой, диск с шкалой, нанесенной на его поверхность, две линейки, первая линейка выполнена с пазом, о т л и - чающийся тем, что, с целью сокращения времени расчета, первая .пинейка .выполнена П-образчой, нижняя- часть линейки подвижно закреплена на оси в центре основания, в пазу первой линейки установлена с возможностью фиксированного перемещения относительно указанного паза ось диска, закрепленная в его центре, относительно которой диск имеет возможность фиксированного вращения, вторая ли25 нейка поворотно соединена с первой линейкой осью, положение которой постоянно совпадает с осью основания, первая линейка снабжена двумя фиксаторами, первый из которызг позволяет
30 фиксировать линейку относительно основания, а второй - относительно диска, первая линейка снабжена визиром, I выполненным в виде паза.
