Изобретение относится к неразрушающему контролю и может быть использовано для автоматизации контроля различных изделий из ферромагнитных материалов,
Известно устройство для неразрушающего контроля изделий из ферромагнитных материалов, содержащее тележку с приводом и механизм прижатия устройства к изделию на основе постоянных магнитов.
Существенным недостатком такого уст- ройства является невозможность маневрирования на контролируемой поверхности, что существенно сужает область его применения.
Известно также устройство для перемещения ультразвуковых преобразователей по контролируемой поверхности из ферромагнитных материалов, состоящее из плат- Формы и размещенными по углам платформы двигателей с магнитными колесами, двигателями и редукторами.
Недостатком этого устройства является также невозможность маневрирования на контролируемой поверхности, что существенно снижает область его применения.
Целью изобретения является расширение возможности маневрирования и повышения производительности контроля,
Поставленная цель достигается тем, что в устройстве, содержащем платформу с размещенными по углам платформы двигателями приводами их вращения, механизмы крепления двигателей к платформе, механизм прижима устройства держатель преобразователя, установленный на платформе, каждый из механизмов крепления двигателей выполнен в виде втулки, жестко закрепленный на платформе со стороны держателя преобразователя, ось которой перпендикулярна ей, установленного во втулке с возможностью осевого перемещения валика с приводом его вращения, кинематично связанного с одним его концом, на другом конце которого расположен двигател ь с приводом его вращения, пружины, установленной на втулке между платформой и корпусом привода вращения двигателя.
Привод вращения валиков выполнен в виде гибкой кинематической передачи с приводным узлом, охватывающей валики.
Устройство снабжено резиновыми бандажами со сферической поверхностью, установленными на наружной поверхности двигателей.
Устройство снабжено установленными между торцами втулок и корпусом приводов вращения двигателей упорными подшипниками.
Оси валиков устройства расположены со смещением относительно осей симметрии платформы,
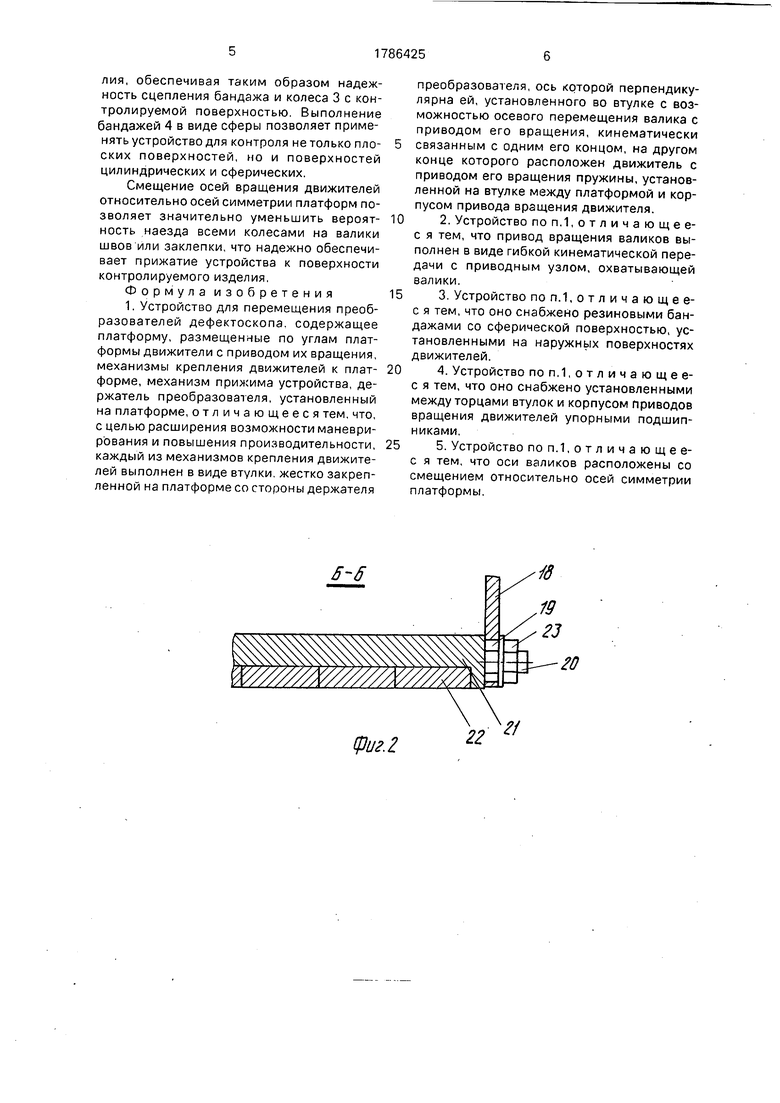
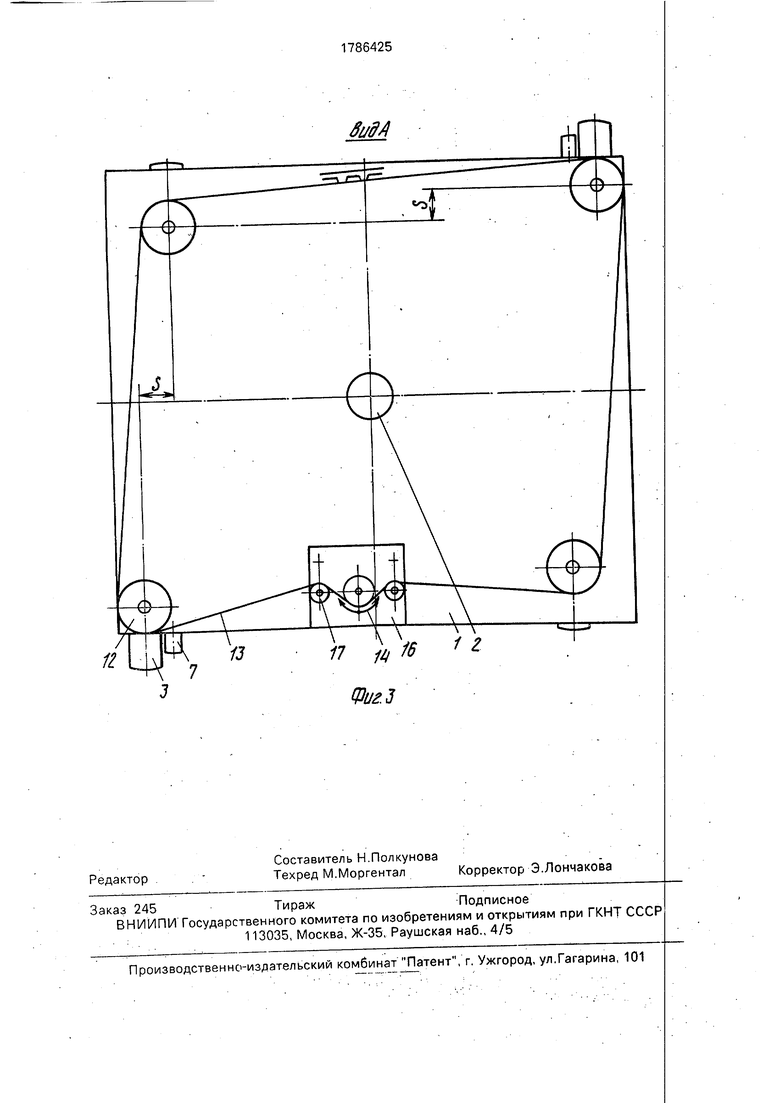
На фиг. 1 изображено устройство для перамещения преобразователей дефектоскопа, общий вид; на фиг.2 - разрез Б-Б на фиг. 1; на фиг.3 - вид А на фиг. 1.
Устройство содержит платформу 1 с прикрепленным к ней ультразвуковым пре0 образователем 2, размещенные по углам платформ движители в виде колес 3 с бандажами 4, редукторами 5 с червячными парами 6 и двигателями 7. Редукторы снабжены полуосями 8, оси которых прохо5 дят через оси симметрии колес 3. Полуоси проходят через направляющие втулки 9. Торцы втулок опираются на упорные подшипники 10. На подшипники 10 опираются и пружины 11. На полуосях 8 закреплены
0 зубчатые шкивы 12, кинематически связанные между собой при помощи зубчатого ре-- мня 13. Зубчатый ремен входит в
зацепление с зубчатым шкивом 14, закреп- ленным на валу двигателя 15. Двигатель за5 креплен на плите 16, где установлены натяжные ролики 17. Боковые стенки 18 устройства снабжены пазами 19, в которых при помощи полуосей 20 установлены кассеты 21 с постоянными магнитами 22, Кас0 сеты 21 фиксируются Набоковых стенках 18 устройства при помощи гаек 23. На фиг.1 обозначены также контролируемое изделие 24 и сварной шов или заклепка 25.
Устройство для перемещения преобра5 зователей дефектоскопа работает следующим образом.
Перед началом работы устройство устанавливается на контролируемое изделие 24, при этом кассеты 21 с магнитами 22 прижи0 мают устройство к поверхности контролируемого изделия 24. Включаются двигатели 7, которые через червячную пару б редукторов 5 передают вращение на колеса 3, перемещая устройство по поверхности контролиру5 емого изделия 24.
При необходимости изменения направления движения включается двигатель 15, который при помощи зубчатой ременной передачи 12, 13, 14 поворачивает движители
0 все вдруг на определенный.угол. Это позволяет эффективно маневрировать на поверхности контролируемого изделия, обходить препятствия, сканировать нужные участки с большой точностью и практически
5 с любым шагом, так как в качестве приводов применяются шаговые двигатели.
При наезде на препятствие в виде валика сварного шва или заклепки 25 следом идущий движитель при помощи пружины 11 надежно прижимается к поверхности изделия, обеспечивая таким образом надежность сцепления бандажа и колеса 3 с контролируемой поверхностью. Выполнение бандажей 4 в виде сферы позволяет применять устройство для контроля не только пло- ских поверхностей, но и поверхностей цилиндрических и сферических.
Смещение осей вращения движителей относительно осей симметрии платформ позволяет значительно уменьшить вероят- ность наезда всеми колесами на валики швов или заклепки, что надежно обеспечивает прижатие устройства к поверхности контролируемого изделия.
Фор мула изобретения 1. Устройство для перемещения преобразователей дефектоскопа, содержащее платформу, размещенные по углам платформы движители с приводом их вращения, механизмы крепления движителей к плат- форме, механизм прижима устройства, держатель преобразователя, установленный на платформе, отличающееся тем, что, с целью расширения возможности маневрирования и повышения производительности, каждый из механизмов крепления движителей выполнен в виде втулки, жестко закрепленной на платформе со стороны держателя
преобразователя, ось которой перпендикулярна ей, установленного во втулке с возможностью осевого перемещения валика с приводом его вращения, кинематически связанным с одним его концом, на другом конце которого расположен движитель с приводом его вращения пружины, установленной на втулке между платформой и корпусом привода вращения движителя.
2. Устройство поп.1,отличающее- с я тем, что привод вращения валиков выполнен в виде гибкой кинематической передачи с приводным узлом, охватывающей валики.
3. Устройство поп.1,отличающее- с я тем, что оно снабжено резиновыми бандажами со сферической поверхностью, установленными на наружных поверхностях движителей.
4. Устройство поп,1,отличающее- с я тем, что оно снабжено установленными между торцами втулок и корпусом приводов вращения движителей упорными подшипниками.
5. Устройство поп.Ч.отличающее- с я тем, что оси валиков расположены со смещением относительно осей симметрии платформы.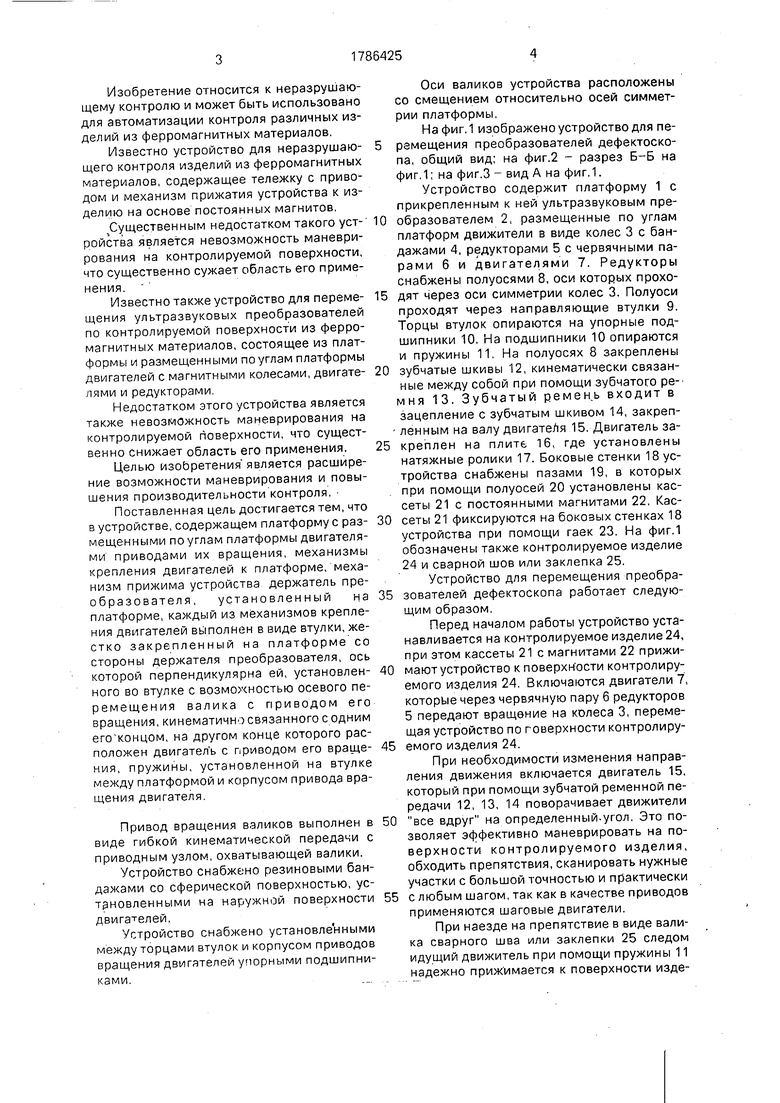
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения ультразвуковых преобразователей | 1986 |
|
SU1508139A1 |
| Устройство для перемещения ультразвуковых преобразователей | 1984 |
|
SU1272217A1 |
| Устройство для перемещения ультразвуковых преобразователей | 1985 |
|
SU1320740A1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| Устройство для дефектоскопии цилиндрических изделий | 1991 |
|
SU1797048A1 |
| Двигатель внешнего сгорания и система управления двигателем внешнего сгорания | 1989 |
|
SU1831580A3 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| СТЕНД МАГНИТОПОРОШКОВОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС | 2015 |
|
RU2601295C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
Изобретение относится к неразрушающему контролю и может быть использовано для автоматизации контроля различных изделий из ферромагнитных материалов. Цель изобретения - расширение возможности маневрирования и повышения производительности. Двигатели установлены на платформе 1 с возможностью вращения вокруг . й Г ff fff f ft1 ff 1Мп.|н-.м)ЫсТ оси са Фо соб свя да сна гат рол зин но пла ме уст луо осе пр янн пом уст заз сть 3 и оси, проходящей через ось -симметрии колеса 3, и перпендикулярно поверхности плат- Формы 1, при этом полуоси 8 связаны между собой при помощи гибкой кинематической связи, например зубчатой ременной передачей 13. Гибкая кинематическая связь снабжена приводным устройством в виде двигателя 15 с зубчатым шкивом 12 и натяжными роликами 17. Колеса двигателей снабжены резиновыми бандажами со сферической поверхностью. Двигатели установлены на платформе 1 подпружиненными, при этом между пружиной 11 и корпусом редуктора установлены упорные подшипники 10. Полуоси 8 двигателя смещены относительно осей симметрии платформы. Механизм прижима выполнен в виде кассет с постоянными магнитами, установленными при помощи полуосей в пазах боковых стенок устройства с возможностью регулирования зазора между контролируемой поверхностью и поверхностью магнитов. 4 з.п.ф-лы, 3 ил. ел С
| Устройство для перемещения ультразвуковых преобразователей | 1986 |
|
SU1508139A1 |
