Изобретение относится к неразрушающему контролю и может быть использовано в различных отраслях промышленности при дефектоскопии цилиндрических изделий, например при проверке качества сварных швов трубопроводов.
Известны устройства для дефектоскопии цилиндрических изделий, например устройство для ультразвукового контроля сварных швов труб, содержащее гибкий бандаж, устанавливаемую на него в процессе контроля каретку с приводом его перемещения в виде ведущей звездочки, прикрепленные к каретке взаимодействующие с бандажем направляющие элементы, искательные головки и разъемную роликовую цепь крепления каретки к контролируемому изделию с замком..
Недостатком этого устройства является невозможность осуществления непрерывного контроля поверхности изделия, невозможность осуществления контроля по всей
толщине стенки трубы, а также то, что при переходе на контроль изделий другого диаметра необходимо изменить длину гибкого элемента.
Также известно устройство для ультразвуковой дефектоскопии изделий, содержащее установленную на катках каретку с приводом ее перемещения, размещенный на ней преобразователь, и узел поджима каретки к изделию, предназначенный для охвата изделия и выполненный в виде гибкого элемента и взаимодействующих с ним натяжных роликов, закрепленных на каретке.
Недостатком этого устройства является невозможность осуществления непрерывного контроля поверхности изделия, невозможность осуществления контроля по всей толщине стенки трубы, а также то, что при переходе на контроль изделий другого диаметра необходимо изменить длину гибкого элемента.
ел С
XI Ю Ы
О 4 00
В качестве прототипа выбрано устройство для дефектоскопии цилиндрических изделий, содержащее каретку установленную на катках имеющих возможность поворота вокруг осей, перпендикулярных плоскости каретки, привод перемещения каретки, размещенный на ней преобразователь и узел поджима каретки к изделию, предназначенный для охвата изделия и выполненный в виде гибкого элемента и взаимодействующих с ним натяжных роликов, закрепленных на каретке. ;
К недостаткам этого прототипа следует отнести то, что между катками и поверхностью трубы возможно проскальзывание, что снижает качество контроля.
Кроме того, при контроле труб прототип не обеспечивает контроль по всей толщине стенки трубы.
Целью изобретения является повышение качества контроля и обеспечение контроля труб по всей толщине их стенки.
Поставленная цель достигается благодаря тому, что в устройстве для дефектоскопии цилиндрических изделий, содержащем каретку с базовой плоскостью, установленную на катках, имеющих возможность поворота вокруг осей, перпендикулярных базовой плоскости каретки, привод перемещения каретки, преобразователь, установленный на каретке, гибкий элемент предназначенный для охвата изделия, и узел крепления гибкого элемента на каретке предусмотрено, что узел крепления гибкого элемента выполнен в виде кинематически связанных с приводом перемещения каретки обгонных муфт, оси которых установлены на каретке и параллельны базовой плоскости, барабанов установленных на осях обгонных муфт с возможностью вращения относительно них, и спиральных пружин, один конец которых жестко закреплен на оси обгонных муфт, а второй на барабане. При этом концы гибкого элемента закреплены на обгонных муфтах. Кроме того в устройстве предусмотрено, что преобразователь установлен на каретке с возможностью возвратно-поступательного перемещения вдоль нее. Отличительным признаком устройства для дефектоскопии цилиндрических изделия является то, что гибкий элемент охватывающий изделие одновременно служит для поджатия каретки к изделию и является-тяговым элементом привода за счет того, что узел крепления гибкого элемента выполнен в виде кинематически связанных с приводом перемещения каретки обгонных муфт, оси которых установлены на каретке и параллельны базовой плоско- сти, барабанов, установленных на осях обгонных муфт с возможностью вращения относительно них и спиральных пружин, один конец которых жестко закреплен на оси обгонных муфт, а второй на барабане, а концы
. гибкого элемента закреплены на обгонных муфтах.
Кроме того, к отличительным признакам устройства следует отнести то, что преобразователь установлен на каретке с возможностью
0 возвратно-поступательного перемещения вдоль нее. Такая конструкция устройства позволяет повысить качество контроля за счет отсутствия проскальзывания при перемещении устройства вокруг контролируемого изделия, и
5 обеспечить осуществление контроля по всей толщине стенки контролируемой трубы.
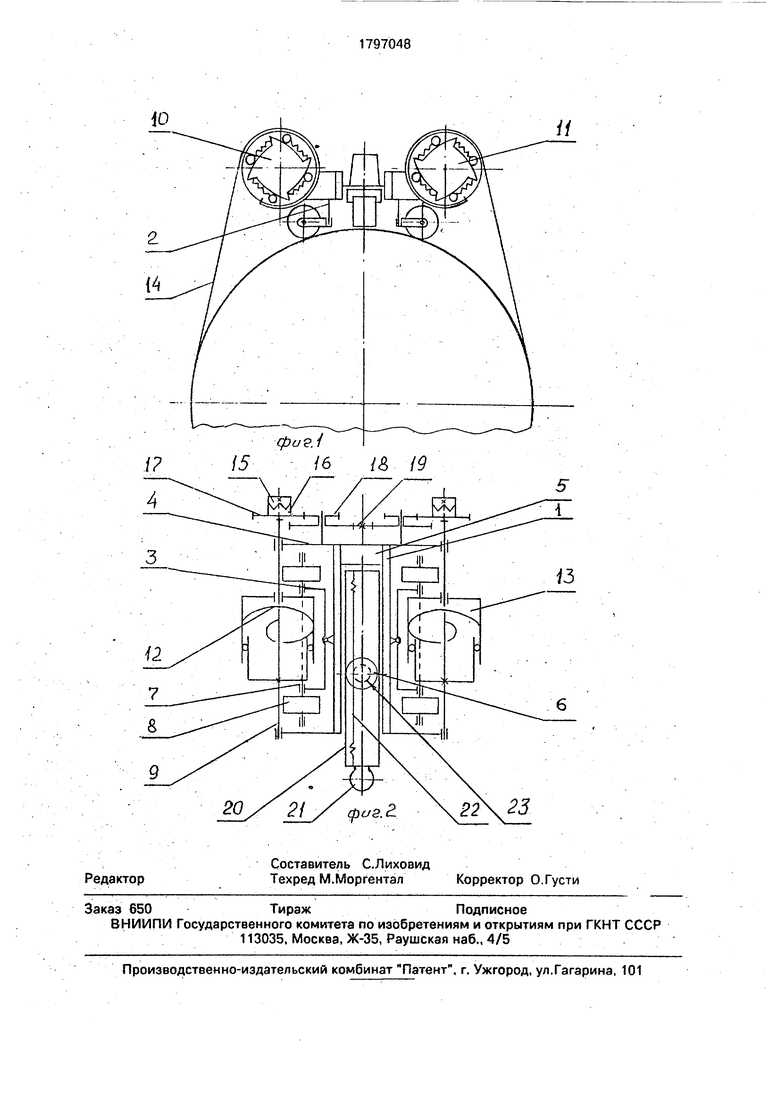
На фиг. 1 и 2 графически представлено предложенное устройство, две проекции.
0 Устройство для дефектоскопии цилиндрических изделий состоит из каретки 1, на которой размещены пальцы 2 со свободно вращающимися на них кронштейнами 3, стойками 4 и двигателями 5 и 6. НА кронш5 теинах 3 установлены оси 7 с катками 8. В стойках 4 свободно вращаются валики 9, на которых установлены барабаны 10 и 11 выполненные в виде обгонных муфт. Внутренние полумуфты этих муфт жестко связаны с
0 валиками 9, а наружные полумуфты имеют разное направление свободного вращения и связаны с валиком 9 при помощи спиральных пружин 12 и 13, имеющих разное направление навивки. На барабанах 10 и 11
5 намотаны и закреплены концы гибкого элемента 14, который охватывает контролируемое изделие. На валиках 9 размещены сцепление муфты, причем полумуфты 15 жестко связаны с валиком 9, а другая полумуф0 та 16 - свободно установлена на валике 9 и жестко связана зубчатым колесом 17. Зубчатые колеса 17 через зубчатые блоки 18 связаны шестерней 9, закрепленной на валу электродвигателя 5.
5 в направляющих пазах каретки 1 размещен ползун 20, на котором установлен первичный преобразователь 21. На концах ползун 20 закреплены концы подпружиненного тросика 22, охватывающего блок 23,
0 который жестко закреплен на валу электродвигателя 6.
Предлагаемое устройство для дефектоскопа цилиндрических изделий работает следующим образом..
5 Каретку 1 устанавливают катками 8 на контролируемое изделие. При необходимости осуществления контроля по винтовой линии кронштейны 3 с катками 8 разворачивают на соответствующий угол. Затем вращением валиков 9 в разных направлениях
заводим спиральные пружины 12 и 13. При этом сцепные муфты находятся в расцепленном состоянии. После того как пружины заведены, сцепляют полумуфты 15 и 16 сцепных муфт, тем самым удерживая от вращения барабаны 10 и 11. Затем гибким элементом 14 охватывают изделие и свободные концы этого гибкого элемента, несколько раз наматывая на барабаны 10 и 11, закрепляют на этих барабанах. Длина намотки зависит от протяженности участка подлежащего контролю, и в общем случае может превышать длину образующей контролируемого изделия. После этого расцепляют сцепные муфты, спиральные пружины раскручиваются и, вращая барабаны 10 и 11, обеспечивают необходимое натяжение гибкого элемента 14 для удержания предлагаемого устройства в любом его пространственном положении на контролируемом изделии. Затем снова включают сцепные муфты, обеспечивая кинематическую связь электродвигателя 5 через шестерню 19, зубчатые блоки 19, зубчатые колеса 17, валики 9 и барабаны 10 и 11 с гибким элементом 14.
Включают электродвигатель 5. При этом начинают вращаться барабаны 10 и 11. Одному из барабанов движение передается через его обгонную муфту, и на этот барабан будет наматываться гибкий элемент 14, сма- тываясь при этом с другого барабана вращающегося в том же направлении что и первый. Причем, второй барабан будет вращаться в направлении свободного хода его обгонной муфты и кинематически не будет связан с электродвигателем 5, а спиральная пружина, связанная с этим барабаном, будет создавать необходимое натяжение гибкого элемента. Каретка 1 начнет перемещаться
по поверхности. Одновременно с двигателем 5 включают электродвигатель 6. Начинает вращаться блок 23. Охватывающий его подпружиненный тросик 22 будет увлекать за собой ползун 20, который будет перемещаться в направляющих каретки 1, которая в это время перемещается вокруг контролируемого изделия. При достижении ползуном 20 одного из крайних положений, двигатель 6 начинает вращаться в противоположном направлении, т.о. ползун 20 будет осуществлять возвратно-поступательное движение. Тем самым преобразователь 21 будет осуществлять одновременно возвратно-поступательное движение вдоль контролируемого изделия и вращение вокруг него. Возвратно- поступательное перемещение преобразователя обеспечит контроль изделий типа труб по всей толщине их стенки, а движение преобразователя вокруг контролируемого изделия обеспечит контроль по его цилиндрической поверхности. Устройство для дефектоскопии цилиндрических изделий обладает по сравнению с прототипом и аналогами такими техническими преимуществами, как повышение качества контроля при перемещении устройства вокруг контролируемого изделия и обеспечение контроля труб по всей толщине их стенки за счет возвратно-поступательного перемещения преобразователя вдоль оси контролируемого изделия.
Эти технические преимущества достигаются тем, что гибкий элемент, охватывающий контролируемое изделие, одновременно служит для поджатия каретки к изделию и является тяговым элементом привода, а преобразователь установлен на каретке с возможностью возвратно-поступательного перемещения вдоль нее.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующее устройство для неразрушающего контроля цилиндрических полостей | 1980 |
|
SU911308A1 |
| Установка для контроля внутреннейпОВЕРХНОСТи цилиНдРичЕСКиХ издЕлий | 1979 |
|
SU794451A1 |
| Устройство для торкретирования стен камер промышленных печей | 1983 |
|
SU1161806A1 |
| Устройство для ультразвуковой дефектоскопии изделий в труднодоступных местах | 1982 |
|
SU1033959A1 |
| Устройство для укладки штучных изделий в тару | 1979 |
|
SU973412A1 |
| Самоходная тележка | 1978 |
|
SU749726A1 |
| Автомат для изготовления штучных керамических изделий при пластическом формовании | 1991 |
|
SU1791135A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ УЛЬТРАЗВУКОВОГО ИММЕРСИОННОГО КОНТРОЛЯ КАЧЕСТВА СВАРКИ | 1991 |
|
RU2036471C1 |
| Устройство для сканирования изделия | 1988 |
|
SU1665296A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ ШВОВ ТРУБ | 1989 |
|
SU1623421A1 |
Изобретение относится к неразрушающему контролю и может быть использовано для выявления дефектов в цилиндрических изделиях, например при проверке качества сварных швов в трубопроводах. Эффект достигается за счет повышения качества контроля.. Устройство содержит каретку с базовой плоскостью, установленную на катках, привод перемещения каретки, преобразователь и гибкий элемент, охватывающий контролируемое изделие, концы которого закреплены на обгонных муфтах. Для контроля труб по всей толщине их стенки преобразователь устанавливается на каретке с возможностью возвратно-поступательного перемещения вдоль нее. 1 з.п. ф-лы, 2 ил.
Формула изобретения 1. Устройство для дефектоскопии цилиндрических изделий, содержащее каретку с базовой плоскостью, установленную на катках, имеющих возможность поворота вокруг осей, перпендикулярных к базовой плоскости каретки, привод перемещения каретки, преобразователь, установленный на каретке, гибкий элемент, предназначенный для охвата изделия, и узел крепления гибкого элемента на каретке, отличаю ще- е с я тем, что, с целью повышения качества контроля, узел крепления гибкого элемента выполнен в виде кинематически связанных с приводом перемещения каретки обгонных
муфт, оси которых установлены на каретке и параллельны ее базовой плоскости, барабанов, установленных на осях обгонных муфт с возможностью вращения относительно них, и спиральных пружин, один конец которых жестко закреплен на оси обгонных муфт, а другой на барабане, а концы гибкого элемента закреплены на обгонных муфтах.
труб по всей толщине их стенки, преобразователь установлен на каретке с возможностью
возвратно-поступательного перемещения
вдоль нее.
| Устройство для ультразвукового контроля сварных швов труб | 1984 |
|
SU1165979A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для ультразвуковой дефектоскопии изделий | 1960 |
|
SU131959A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для дефектоскопии цилиндрических изделий | 1977 |
|
SU785724A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
