периметра поперечного сечения трала, а телекамеру поворачивают относительно подводного аппарата в вертикальной плоскости, причем перемещение подводного аппарата вдоль упомянутого периметра и поворачивание телекамеры осуществляют одновременно.
Сопоставительный анализ с прототипом показывает, что способ отличается наличием новых существенных признаков таких, что дополнительным перемещением подводного аппарата вдоль верхней части периметра поперечного сечения трала, поворачиванием телекамеры относительно аппарата в вертикальной плоскости и осу- ществлением этих операций одновременно.
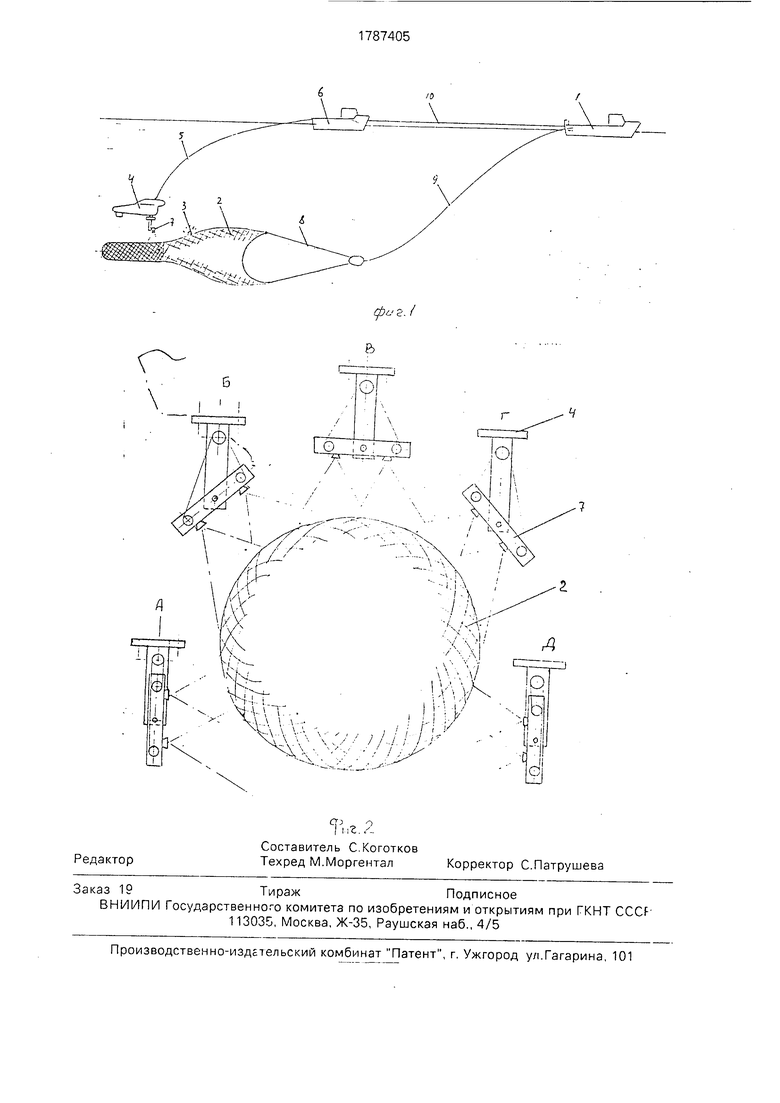
На фиг.1 приведен общий вид устройства; на фиг.2 - различные положения подводного аппарата относительно трала.
Устройство содержит промысловое суд- но 1 с тралом 2 и светомаяком 3, подводный аппарат 4, связанный посредством кабель- троса 5 с судном-носителем 6 и снабженный телекамерой 7, причем трал крепится к промысловому судну с помощью кабелей 8 и ваеров 9, а промысловое судно связано с судном-носителем мерным тросом 10 для установления постоянного расстояния между судами.
Для осуществления заявленного спосо- ба с промыслового судна 1 производят спуск трала 2 со светомаяком 3. Перед спуском аппарата 4 на воду сообщают на судно-носитель 6 размеры трала, длину кабелей 8 и вытравленных ваеров 9. Произ- водят расчет длины кабель-троса 5, после чего аппарат 4 спускают на воду и выводят судно-носитель в кильватер промыслового судна, выравнивают скорости судов и поддерживают их с помощью мерного троса 10. Затем погружают подводный аппарат 4 в воду и маневрирование им для выхода в за да иную точку над трал ом 2. Маневрирование аппарата 4 осуществляют с ориентировкой на светомаяк 3. После выхода аппарата 4 в заданную точку для наблюдения за состоянием трала 2 и его оснасткой производят маневрирование аппаратом изменением длины кабель-троса и перемещением аппарата вдоль трала, а также перемещением аппарата вдоль верхней части периметра поперечного сечения трала в положения А, Б, В, Г, Д, и поворачиванием телекамеры 7 относительно подводного аппарата 4 в вертикальной плоскости. Поворачивание телекамеры и перемещение аппарата вдоль упомянутого сечения трала в указанные положения производят одновременно.
Таким образом, использование дополнительных операций позволяет по сравнению с прототипом повысить эффективность работы буксируемого подводного аппарата за счет расширения зоны обзора слежения за разноглубинным тралом.
Формула изобретения
Способ работы буксируемого подводного аппарата с телекамерой для слежения за разноглубинным тралом, при котором подводный аппарат, соединенный кабель-тросом с судном-носителем, погружают в воду и маневрируют им у трала промыслового судна, а судно-носитель перед погружением подводного аппарата выводят в кильватер промыслового судна и, ориентируясь на установленный на трале светомаяк, осуществляют маневрирование аппарата путем изменения длины кабель-троса и перемещение аппарата вдоль трала, отличающий- с я тем, что, с целью повышения эффективности работы буксируемого подводного аппарата путем расширения зоны обзора при слежении за разноглубинным тралом, подводный аппарат при маневрировании дополнительно перемещают вдоль верхней части периметра поперечного сечения трала, а телекамеру поворачивают относительно подводного аппарата в вертикальной плоскости, причем перемещение подводного аппарата и поворачивание телекамеры осуществляют одновременно.
фи г. /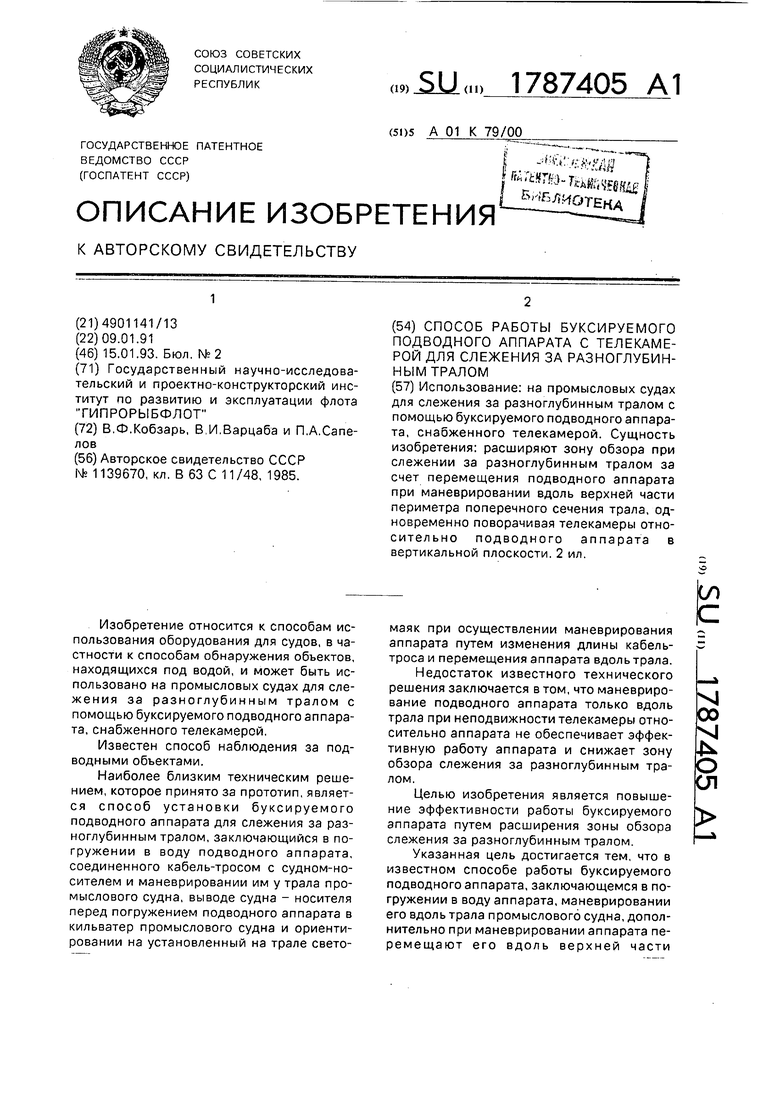

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки буксируемого подводного аппарата для слежения за разноглубинным тралом | 1983 |
|
SU1139670A1 |
| Устройство для визуального наблюдения за орудиями и объектами лова | 1991 |
|
SU1789158A1 |
| Способ настройки рыбопромыслового трала | 1990 |
|
SU1830234A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |
| Устройство для горизонтального раскрытия трала | 1990 |
|
SU1725795A1 |
| Трал для лова гидробионтов | 1991 |
|
SU1824130A1 |
| Трал для лова гидробионтов | 1989 |
|
SU1746969A1 |
| УСТРОЙСТВО ДЛЯ БЛИЗНЕЦОВОГО ЛОВА МОРСКИХОБЪЕКТОВ | 1972 |
|
SU423442A1 |
| Распорная траловая доска | 1989 |
|
SU1687186A1 |
| Подводный поисковый аппарат | 2023 |
|
RU2805898C1 |