У
4V .i;|.
.ft
Изобретение относится к машиностроению.
Известна силоизмерительная опора, входящая в устройство для определения массы и координат центра масс изделия 1. Недостатком опоры является сравнительно низкая надежность.
Наиболее близким по технической сущности и достигаемому результату к изобретению является силоизмерительное УСТ ШСТЁЙ, содер жащее переходную плиту сГ грузоприемным шарниром, установленные под плитой на основании три силоизме- рительных датчика, взаимодействующих с плитой через передающие шарниры 2. Недостатком устройства является сравнительно узкий диапазон измерений и невысокая точность.
Цель изобретения - повышение точности и расширение диапазона измерений. ,. Указанная цель достигается тем, что в устройство, содержащее размещенные на основании три силоизмерительных датчика, шарнирно связанные через силопередаю- щую плиту с силовоспринимающим элементом, введены три дополнительных силоизмерительных датчика с переходными шарнирами, выполненными в виде подпружиненных штоков, связанных с силопереда- ющей плитой, при этом силоизмерительные датчики установлены относительно силопе- редающей плиты на заданном расстоянии X, выбранном из условия
Z-Y,
где б - величина номинальной деформации силоизмерительных датчиков;
Z - величина максимальной деформации пружин штоков дополнительных силоизмерительных датчиков;
Y - величина предварительной деформации пружин штоков дополнительных силоизмерительных датчиков, выбранная из условия
.
На фиг.1 дана схема устройства; на фиг,2 - графическая иллюстрация повышения точности и расширения диапазона измерений при использовании изобретения.
Силоизмерительное устройство содержит силопередающую плиту 1 с силовоспринимающим элементом 2, установленные под плитой 1 на основании 3 три силоизмерительных датчика 4, взаимодействующих с плитой через шарниры 5. На основании 3 под силопередающей плитой 1 установлены три дополнительных силоизмерительных датчика б, взаимодействующих с плитой 1 через переходные шарниры в виде подпружиненных штоков 7. Между основными датчиками 4 и силопередающей плитой 1
0
5
0
5
0
5
0
5
0
5
установлен начальный гарантированный зазор X. Штоки 7 удерживаются от выпадания из отверстий 8 гайками 9 и подпружинива- ются пружинами 10.
Силоизмерительное устройство работает следующим образом.
Измеряемое усилие 0 прикладывается к силобоспринимающему элементу 2. Для примера рассмотрим случай, когда все сило- измерительные датчики одной категории точности 0,1% с номинальной нагрузкой 10 т каждый. Следовательно, номинальная нагрузка Р на дополнительные датчики равна
Р Р1Д + Р2Д + РЗД 10 Т + 10 Т + 10 Т
30 т. Номинальная нагрузка на основные датчики равна:
Ро Рю + Р20 + Рзо 10 т + Ю т + 10 т 30 т.
Номинальная нагрузка РЈ на силоизмерительное устройство равна сумме номинальных нагрузок на все датчики:
+ Ро 60т.
Для построения градуировочной характеристики погрешности измерения силоиз- мерительного устройства рассмотрим изменение прикладываемого усилия Q на него от 10 т до 60 т. До тех пор, пока усилие Q меньше номинальной нагрузки Р дополнительных датчиков, будет оставаться зазор X между основными датчиками 4 и плитой. При этом усилия будут восприниматься только дополнительными датчиками. Суммарная абсолютная погрешность измерений для трех датчиков категории точности 0,1% с номинальной нагрузкой 10 т будет равна
0,1% 30 т 0,1% 30 кг При этом относительная погрешность измерений, рассчитанная по формуле
R Л
для измеряемых усилий 10 т, 20 т, 30 т будет равна, соответственно,
30кг-0,3%
бю:
б20;
Ют 30 кг
0,15%
20т бзо, 3gJЈ-0,1%
При увеличении нагрузки Q зазор X будет уменьшаться и при Q Р 30 т станет равным нулю. Дальнейшего сжатия пружин 10 происходить практически не будет, так как жесткость на сжатие пружин намного меньше жесткости основных силоизмерительных датчиков, которые и будут воспринимать все усилие, превышающее 30 т, которое через пружины воспринимается дополнительными датчиками. Таким образом, начиная с измеряемого усилия 30 т,измерение будет производиться с помощью всех шести датчиков. Абсолютная погрешность измерений будет равна
0,1% 60 т 0,1% 60 кг.
Вычислим относительную погрешность измерений для усилий 30 т, 40 т, 50 т, 60 т.
,2% о,15% 650 г 0,125%
RKn - 60 кг - П 1 «У
660 ° 1/0
Для сравнения построим градуировоч- ную характеристику погрешностей измерения усилия Q с помощью прототипа. В качестве трех силоизмерительных датчиков в прототипе необходимо использовать датчики с номинальной нагрузкой 20т для того, чтобы получить номинальную нагрузку Рпр 60 т. При категории точности также 0,1 % абсолютная погрешность измерений прототипа будет равна:
Д Рпр 0,1 % 60 т 0,1 % 60 кг,
Рассчитаем относительную погрешность измерений с помощью прототипа усилий 10, 20, 30, 40, 50 и 60т
бю 0,6%
620 0,3%
бзо 0,2% бад 0,15% 650 0,125% ббо 0,1%
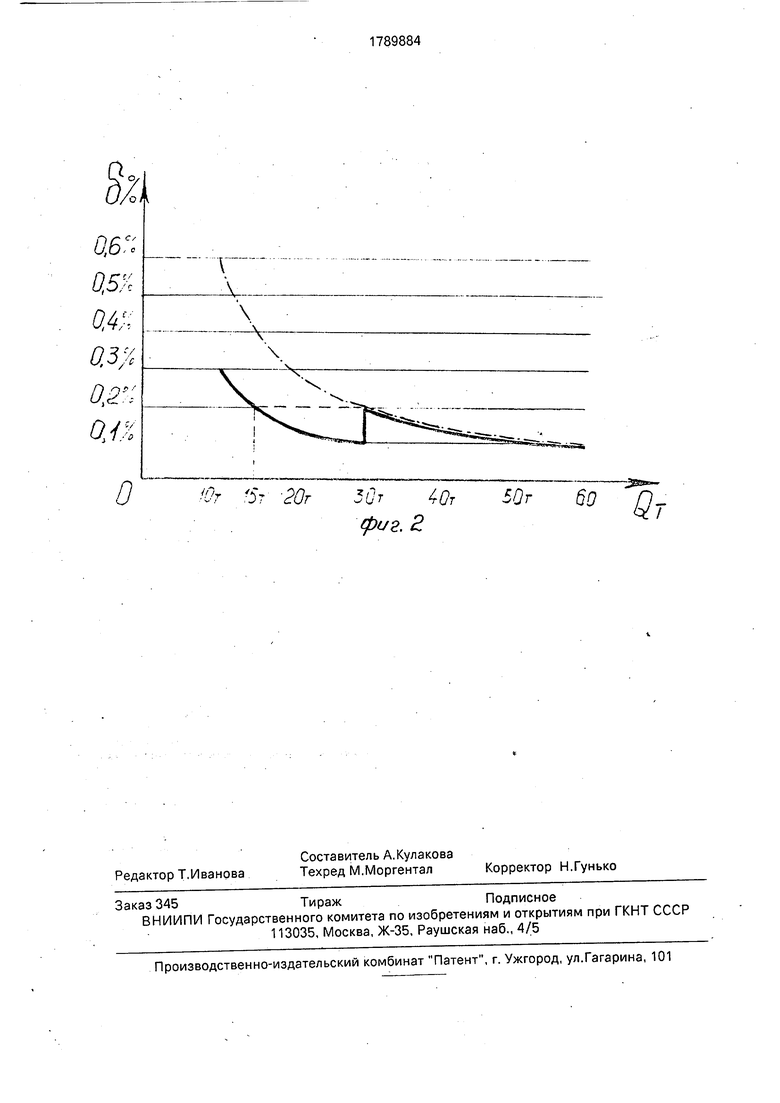
На фиг.2 приведены градуировочные характеристики погрешностей измерения с помощью силоизмерительного устройства
(сплошная линия) и с помощью прототипа (штрих-пунктирная линия). Силоизмери- тельное устройство по сравнению с прототипом позволяет более точно измерять
усилие на нижней границе интервала измеряемых нагрузок. Для рассмотренного примера при измерениях усилий менее 30 т погрешность измерений настоящего изобретения в два раза меньше, чем у прототипа. С другой стороны оно позволяет расширить диапазон измеряемых нагрузок. Как видно из графика, например с погрешностью не хуже 0,2%, прототип позволяет производить в диапазоне от 30 т до 60 т, в
то время как настоящее устройство позволяет производить измерения с погрешностью не хуже.0,2% в интервале от 15 т до 60 т, т.е. нижний предел измерений с заданной точностью уменьшается в два раза.
Таким образом, применение дополнительных силоизмерительных датчиков 6, взаимодействующих с плитой 1 через переходные шарниры 7, выполненные в виде подпружиненных штоков, и установка силоизмерительных датчиков относительно си- лопередающей плиты на заданном расстоянии X, выбранном из условия
, где б - величина номинальной деформации
силоизмерительных датчиков;
Z - величина максимальной деформации пружин штоков дополнительных силоизмерительных датчиков;
Y - величина предварительной деформации пружин штоков дополнительных силоизмерительных датчиков, выбранная из условия
обеспечивает повышения точности и расширение диапазона измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения силы тяги двигателя | 1978 |
|
SU1002856A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНОЙ РЕАКТИВНОЙ СИЛЫ ТЯГИ ЖРД МТ | 2011 |
|
RU2478924C1 |
| Силоизмерительный датчик | 1981 |
|
SU972274A1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ И КОНТРОЛЯ МАССЫ РАБОЧЕЙ ПЛАТФОРМЫ ПОДЪЕМНИКА | 2007 |
|
RU2339566C1 |
| ИЗМЕРИТЕЛЬ ОСЕВЫХ СИЛ В КАНАТНО-ПУЧКОВОЙ АРМАТУРЕ | 2013 |
|
RU2527129C1 |
| ДАТЧИК СИЛЫ | 2004 |
|
RU2280847C2 |
| Устройство для измерения горизонтальной силы тягового сопротивления навесных машин | 1986 |
|
SU1425484A1 |
| Способ измерений переменной силы | 1988 |
|
SU1553865A1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1996 |
|
RU2102710C1 |
Сущность изобретения: устройство содержит три силоизмерительных датчика (4), которые через шарниры (5) связаны с сило- передающей плитой (1). Три дополнительных силоизмерительных датчика (6) связаны с силопередающей плитой (1) через переходные шарниры в виде подпружиненных штоков (7). Силоизмерительные датчики (4) установлены относительно силопередающей плиты (1) на заданном расстоянии. 2 ил.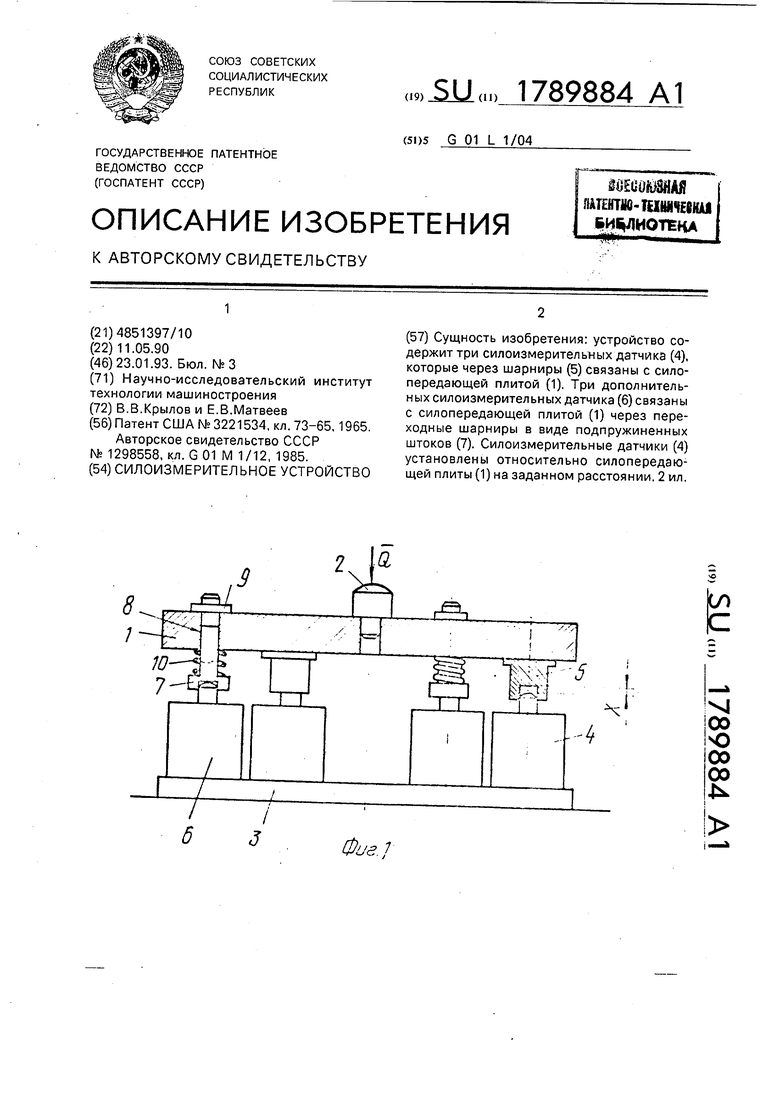
Формула изобретения
Силоизмерительное устройство, содержащее размещенные на основании три силоизмерительных датчика, шарнирно связанные через силопередающую плиту с силовоспринимающим элементом, отличающееся тем, что, с целью повышения точности и расширения диапазона измерений, в него введены три дополнительных силоизмерительных датчика с переходными шарнирами, выполненными в виде подпружиненных штоков, связанных с силопереда- ющей плитой, при этом силоизмерительные
датчики установлены относительно силопе- редающей плиты на заданном расстоянии X, выбранном из условия
б ,
где б - величина номинальной деформации силоизмерительных датчиков;
Z - величина максимальной деформации пружин штоков дополнительных силоизмерительных датчиков;
Y - величина предварительной деформации пружин штоков дополнительных си- лоизмеригельных датчиков, выбранная из условия
.
| Патент США № 3221534, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Устройство для определения массы и координат центра масс изделий | 1985 |
|
SU1298558A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
