Изобретение относится к машиностроению; в частности к шарнирно-рычэж- ным преобразователям непрерывного вращательного движения в колебательное и, в частности, найдет применение в автоматических устройствах. .
Известен шестизвенный механизм, полученный последовательным соединением двух шарнирных четырехзвенников в крайних положениях.
Недостатком этого механизма является получение только одного приближенного выстоя с жестким законом движения за один цикл - прямой ход, обратный ход, выстой. ;. ...- V- ..- .; - V -. -:..;-...: .- . . - ... : Наиболее близким по технической сущности принятый за прототип является кривошипно-Кулисный механизм переменной структуры с выстоем. Механизм содержит основание (стойку) с установленным нанемг кривошипом, кулису, кулисный камень, который шарнйрно связан с основанием, шатун, шарнйрно связанный с соответствующими концами кривошипа и кулисы, два упора, закрепленные на шарнйрно связанных концах соответственно кулисы 1Л шатуна и предназначенные для периодического взаимодействия один с другим, прямолинейный стержень, одним концом жестко связанный с кулисным камнем, ограничитель, закрепленный на основании и предназначенный для периодического взаимодействия со стержнем и пружину, предназначенную Для поджатия стержня к ограничителю.
Недостатком этого механизма является получение только одного точного выстоя с жестким законом движения за один цикл - прямой ход, обратный ход, выстой.
Цель изобретения - расширение кинематических возможностей механизма путем получения закона движения, включающего фазы - прямой ход, обратный ход, выстой в разных сочетаниях за один цикл работы ме-v ханизма, например прямой ход, обратный ход, прямой ход, обратный ход. выстой или прямой ход, выстой, обратный ход, выстой и получение изменения передаточной функции движения во время фазы движения, например Прямой ход/прямой ход с другим передаточным законом, обратный ход, обратный ход с другим передаточным законом, выстой.
Цель достигается тем, что кривошипно- кулисныйпередаточный механизм с выстоем, содержащий основание, установленный на нем кривошип, кулису, камень которой шарнйрно связан с основанием, шатун, шарнйрно связанный с соответствующими концами кривошипа и кулисы, два упора,
закрепленные на шарнйрно связанных концах соответственно кулисы и шатуна и предназначенные для периодического взаимодействия один с другим, прямолинейный стержень, одним концом жестко связанный с камнем кулисы, ограничитель, закрепленный на основании и предназначенный для периодического взаимодействия со стержнем, и пружину, предназначенную для
0 поджатия стержня к ограничителю, снабжен вторым кривошипом, кинематически связанным с первым, второй кулисой, камень которой установлен соосно камню первой кулисы и жестко связан с ним, вторым шату5 ном, Шарнйрно связанным со свободными концами второго кривошипа и второй кулисы, и двумя дополнительными упорами, закрепленными на шарнйрно связанных концах соответственно второй кулисы и вто0 рого шатуна и предназначенными для взаимодействия один с другим..
На фиг. 1 показана кинематическая схе-. . ма механизма; на фиг. 2 - график функции закона движения tp ((р ); на фиг. 3 - гра5 фик функции закона движения с фазами - прямой ход, приближенный выстой, обратный ход, точный выстой; на фиг. 4 - график функции закона движения с фазами набега и сбега, фазы - прямой ход, прямой ход с
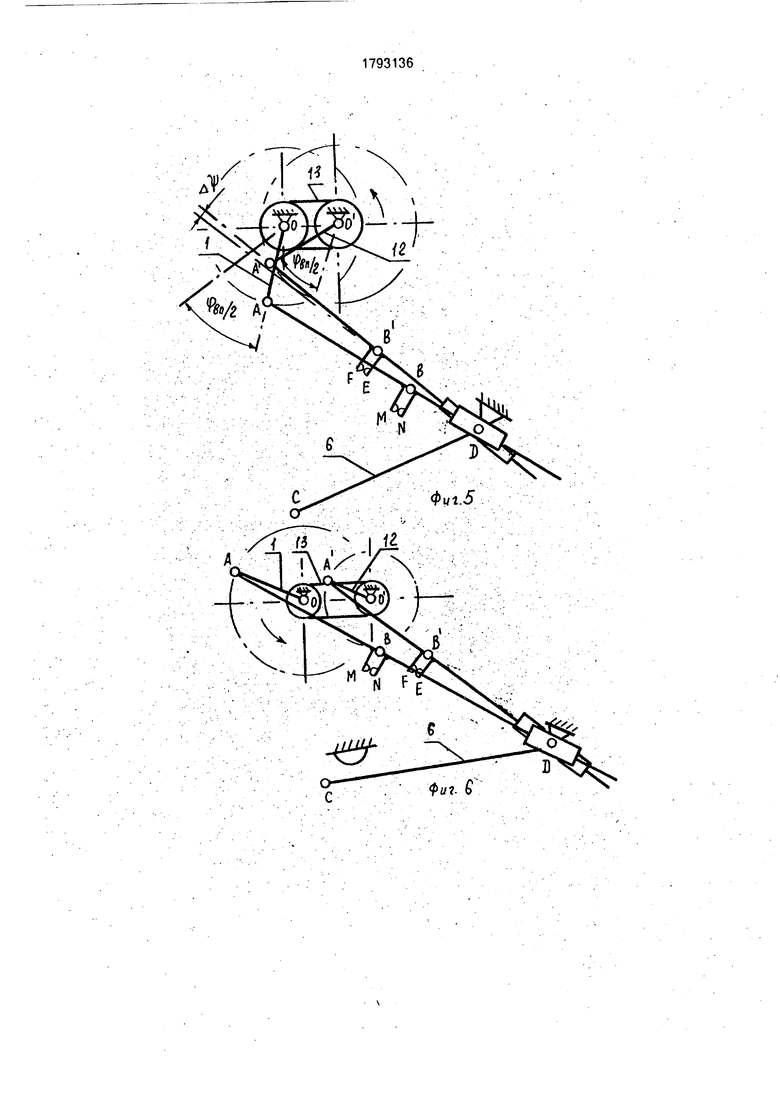
0 другим передаточным законом движения, обратный ход, обратный ход с другим передаточным законом движения, выстой; на фиг. 5 - кинематическая схема механизма с двумя выстоями; на фиг. 6 - кинематическая
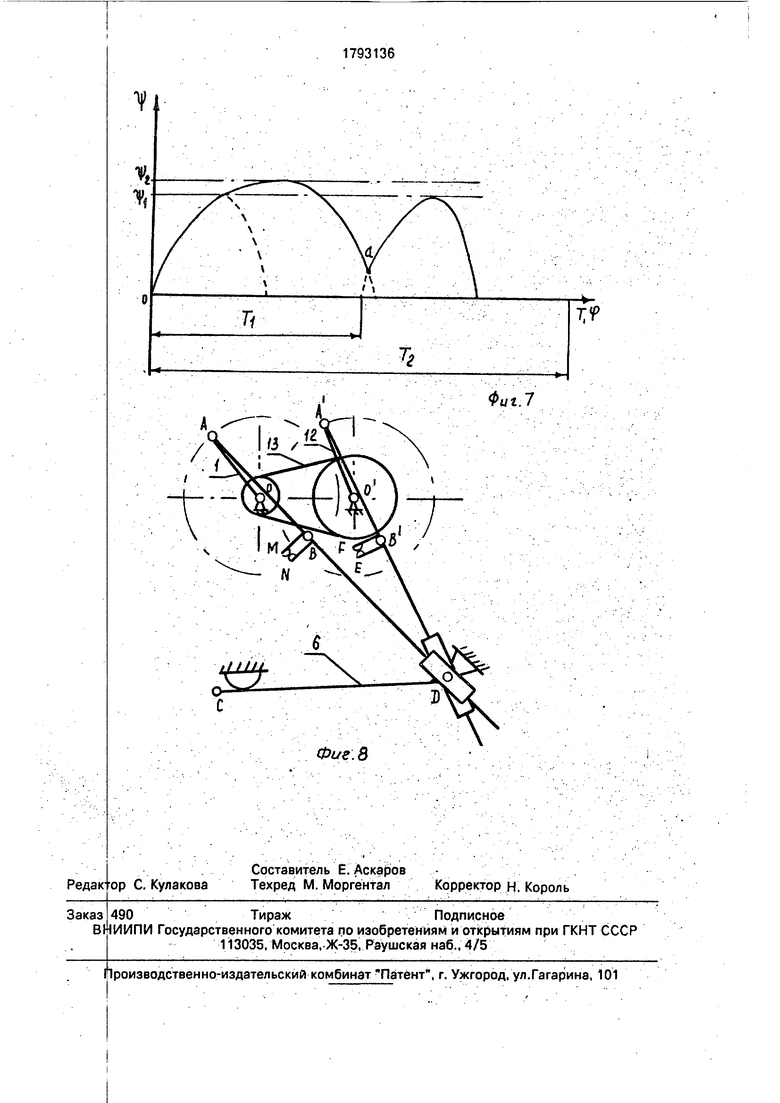
5 схема механизма с законом движения, включающего фазы набега и сбега; на фиг. 7 -график функции закона движения с фазами - прямой ход, обратный ход, прямой ход, обратный ход, выстой; на фиг. 8 - кинемати0 чёская схема механизма с законом движения, включающего фазы - прямой ход, обратный ход. прямой ход, обратный ход, выстой..
Механизм состоит из кривошипа 1 (фиг.
5 1), шатуна 2, кулисы 3, взаимодействующей с кулисным камнем 4, шарнйрно закрепленным на основании 5. На сопряженных концах шатуна 2 и кулисы 3 имеется пара упоров M-N, ограничивающая их вращение
0 вокруг шарнира В. К кулисному камню 4 жестко крепится стержень 6, взаимодействующий с неподвижным ограничителем 7, установленным на основании 5, Со стержнем 6 взаимодействует пружина 8, стремя5 щаяся прижать его к ограничителю 7. Конец пружины 8 закреплен на основании 5. К кулисному камню 4 соосно и жестко крепится дополнительный кулисный камень 9, взаимодействующий с дополнительной кулисой
10, которая шарнйрно связана с дополнителцным шатуном 11, который связан шар- но с дополнительным кривошипом 12, рый имеет кинематическую связь 13 с зошипом 1, например, посредством зуб- й, ременной, цепной и т.д. передач. На яженных концах кулисы 10 и шатуна 11 ;тся пара упоров F-E, ограничивающая
нир
котС
кри
чатс
соп
ИМ6|
их взаимное вращение относительно шарнира В . Угол определяет положение прямых отсекающих на окружностях ОА и OVV сегменты, определяющие значения углов вые оя (рь и рь2. На этот же угол у смещены кулисные камни 4 и 9, По существу механизм представляет собой параллельное сое/ инениё двух механизмов прототипа - ОАВОСиО А В рС.
Механизм работает следующим образом.
(ривошип 1 (фиг. 1) получает равномерное зращение от привода (не показан), через кинематическую связь 13 получает вращение кривошип 12. Контуры OABDC и О А J DC работают как механизмы протбти- па. Рассмотрим работу контура. OABDC независимо от работы контура O A B DC. При прохождении кривошипом 1 угла рь который шляется углом выстоя этого контура и определяется как угол, опирающийся на хорд/, являющуюся частью прямой, проведенной через кулису 3 при контакте стержня 6с ограничителем 7, контур работает в режим ползунного механизма, камень 4 неподвижен, упоры M-N разомкнуты. При далыейшем движении кривошипа 1 упоры M-N смыкаются, контур OABDC работает в режиме кулисного механизма. Стержень 6 полуоет колебательное движение. При про де кривошипом 1 угла .х прямого хода стержень 6 отклоняется на угол , при проходе кривошипом 1 угла уъ.х обратного хода стержень 6 возвращается в исходное поло кение, чему способствует действие пруж 6 в и мкну (ро.х (.
которое определяется нахождением конца А кривошипа 1 в точке касания касательной, проведенной из точки D к окружности ОА. На фиг. 1 контур OABDC показан именно в этом положении. Контур O A B DC работает аналогичным образом. Контуры OABDC и O A B DC имеют соответственно функции перемещения () M $21 F(2f). где Vii- 5i угол поворота стержня 6; ц, pi - угол поворота кривошипа 1 и 12.
В предлагаемом механизме оба контура работ зют одновременно, но ведущим в каждый юнкретный момент времени может
/1ны 8. Мгновенному возврату стержня сходное положение препятствуют со- ые упоры M-N. Значения углов рп.х, и пределяются крайним положением.
быть только один контур, тот который в данный момент имеет брльшее значение функции $.,- его пара упоров в эттГг момент сомкнута, а у другого контура разомкнута. 5 Контур, у которого пара упоров разомкнута, в это время является ведомым, его кулиса 3 или 10, имея возможность свободного перемещения в кулисном камне 4 или 9, не заклинивает механизм. Если представить
О функции ii f( ) и ipi F( ) в виде графиков (фиг. 2), то график функции.движения механизма в.целом выглядит как линия, очерчивающая внешний контур полученных кривых. В точках перегиба а происходит
5 смена ведущего контура. Подбирая параметры контуров OAB Dc и O A B .DC и передаточное отношение кинематической связи 13, возможно получение самых разнообразных законов движения. В частности,как по0 казано на фиг. 2, псевдохаотичного, полученного путем установки некратных друг другу периодов оборотов кривошипов 1 и 12, Ti и Т2. Период цикличности такого закона движения будет очень большим, он
5 равен T Ti Т2. Цикл работы такого механизма будет равен этому периоду. Закон движения такого механизма будет включать фазы прямого хода, обратного хода с разной амплитудой движения исполнительного
0 звена - стержня 6, а там, где фазы выстоев обоих контуров накладываются, будет фаза выстоев с разной продолжительностью. Такой закон движения приближенно можно считать хаотичным. .
5 На фиг. 3 показан график закона движе-- ния с фазами: прямой ход, приближенный выстой, обратный ход, точный выстой.
На фиг. 4 показан график закона движения с фазами: прямой ход, прямой ход с
0. другим передаточным законом, обратный ход, обратный ход с другим передаточным законом, выстой, т.е. закон движения с фазами сбега и набега Для получения механизма с законом движения, показанного на
5 фиг, 3, необходимо, чтобы оба контура OABDC и O A B DC были одинаковы по размерам (фиг. 5), их кривошипы 1 и 12 имели одну частоту вращения, т.е. передаточное отношение кинематической связи 13 было
0 равно 1, фазы движения контуров были смещены на половину угла приближенного вы- -. стоя рв.п (фиг. 3). Угол Д является углом погрешности выстоя. Приближенный выстой получается при прохождений кривоши5 пами 1 и 12 крайнего положения. Сначала
стержень 6 ведется контуром OABDC (фиг.
5), ведущим является кривошип 1, упоры
M-N сомкнуты. При прохождении крайнего
.. положения большому углу поворота кривошипа 1 соответствует намного меньший угол поворота кулисы 3, если этот угол не превышает допустимую погрешность вы- стоя Д-, имеем приближенный выстой ма- лой продолжительности. Когда кривошип 1 начинает уходить из области крайнего положения в эту область входит кривошип 12, ведущим становится контур O A B DC, упоры F-E- смыкаются и вновь получаем приближенный выстой малой продолжу- тельности. Совокупность двух малых высто- ев дает один приближенный выстой достаточно большой продолжительности. Для получения механизма с фазами набега и сбега необходимо, чтобы оба контура QABDC и 0 А В СУС (фиг. 6) имели одинаковую частоту вращения кривошипов 1 и 12, контуры должны иметь разные значения угла качания стержня б Т,, тот контур, который имеет меньшее значение угла
$, должен иметь меньшую фазу вы- стоя.
На фиг. 7 показан график закона движения с фазами: прямой ход, обратный ход, прямой ход, обратный ход, выстой. Для получения такого закона движения частоты вращения кривошипов 1 и 12 механизма должны быть разные, причем частота одного кривошипа должна быть в 2 раза больше частоты-вращения другого кривошипа, т.е. передаточное отношение кинематической связи 13 должно равняться 2 или 0,5 (фиг. 8).
Как было показано, механизм может иметь закон движения с разнообразными сочетаниями фаз: прямой ход, обратный ход, выстой, что несомненно расширяет возможное™ и область применения подобных механизмов. Механизм может найти применение в конструкциях автоматических устройств и приборов.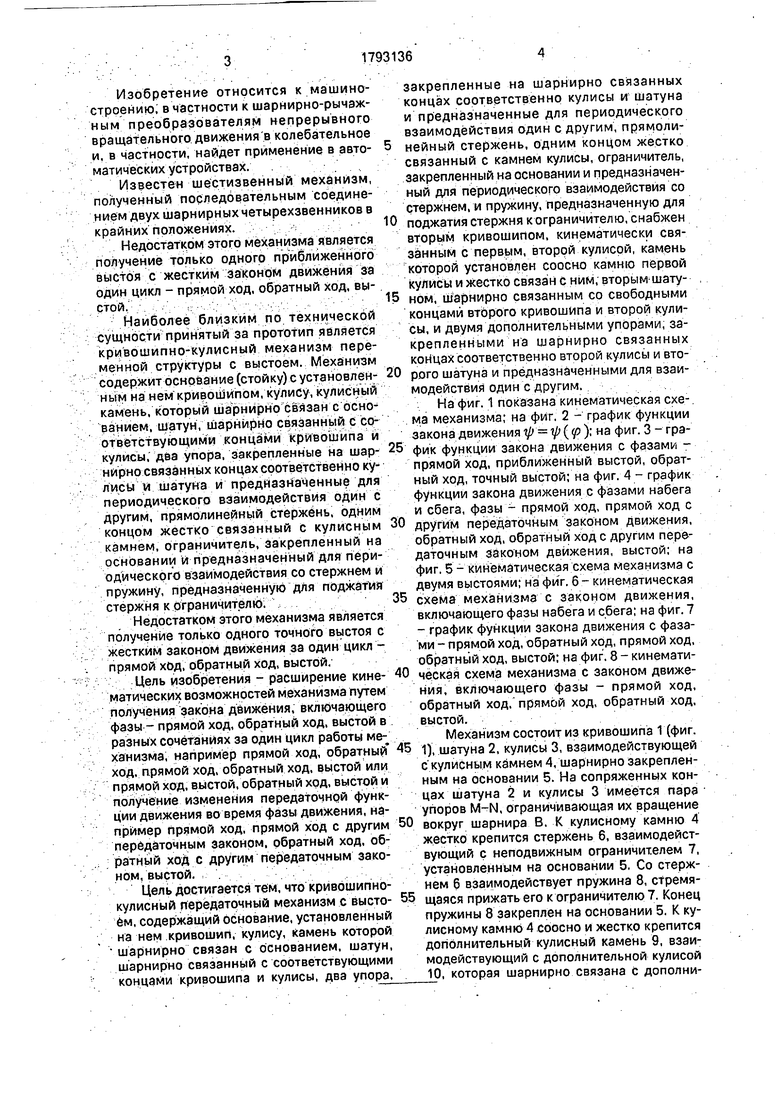
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| Автооператор | 1989 |
|
SU1685675A1 |
| Кривошипно-кулисный механизм с выстоем | 1988 |
|
SU1518601A1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| Автооператор | 1991 |
|
SU1799726A1 |
| МЕХАНИЗМ С ВЫСТОЯМИ ВЫХОДНОГО ЗВЕНА | 2002 |
|
RU2229047C1 |
| Шайбонавивочный автомат | 1979 |
|
SU810347A1 |
| Кулисный рычажно-кулачковый механизм для воспроизведения заданных кривых | 1987 |
|
SU1441117A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
Изобретение относится к машиностроению,|в частности к щарнирно-рычажным преобразователям непрерывного вращательного движения в колебательное, и найдет применение в автоматических устройствах. Целью изобретения является расширение кинематических возможностей. Механизм снабжен вторым кривошипом 12, кинематически связанным с первым кривошипом 1, дополнительной кулисой 10, камень 9 которой установлен соосно камню 4 кулисы 3. Кроме того, имеются второй шатун 11 и два дополнительных упора. Кривошип 1 получает равномерное вращение от привода, через кинематическую связь 13 получает вращение кривошип 12. При дальнейшем движении кривошипа 1 упоры смыкаются и стержень 6 получает колебательное движение. 8 ил.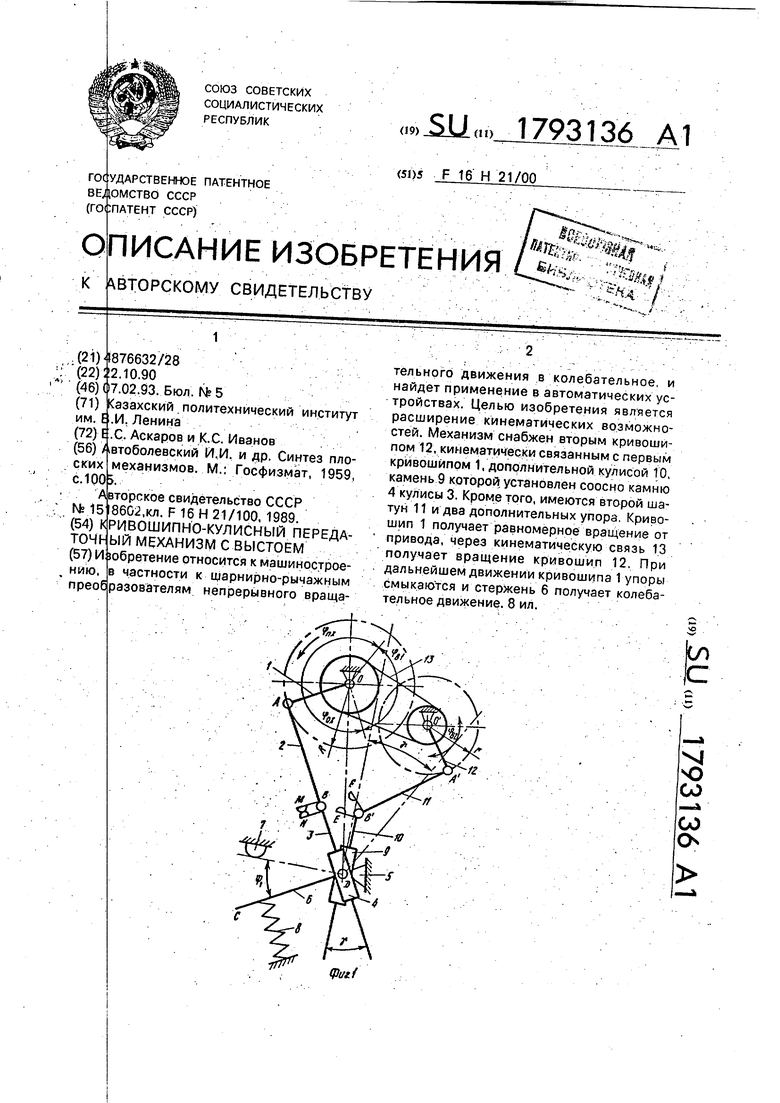
Формула изобретения
Кривощипно-кулисный передаточный механизм с выстоем, содержащий основание, установленный на нем кривошип, кулису, камень которой шарнирно связан с основанием, шатун, шарнирно связанный с соответствующими концами кривошипа и кулисы, два упора, закрепленные на шарнирно связанных концах соответственно ку- лисы и шатуна -и предназначенных для периодического взаимодействия один с другим прямолинейный стержень, одним концом жестко связанный с камнем кулисы, ограничитель/закреплённый на основании и предназначенный для периодического
взаимодействия со стержнем, и пружину, предназначенную для .поджатия стержня к , ограничителю, о т л и ч а ю щ и и с я тем, что, с целью расширения кинематических возможностей, механизм снабжен вторым кривошипом, кинематически связанным с первым, второй кулисой, камень которой установлен соосно с камнем первой кулисы и жестко связан с ним, вторым шатуном, шарнирно связанным со свободными концами второго кривошипа и второй кулисы, и двумя дополнительными упорами, закрепленными на шарнирно связанных концах соответственно второй кулисы и второго шатуна и предназначенных для взаимодействия один с другим. ..;.:
| Автоболевский И.И, и др | |||
| Синтез плоских механизмов | |||
| М.: Госфизмат, 1959, c.100f зторское свидетельство СССР № 15|8602,кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
