Изобретение относится к машиностроению, а именно к автооператорам циклового действия, и может быть использовано для автоматизации загрузки-выгрузки технологического оборудования.
Целью изобретения является расширение технологических возможностей за счет получения трех точных выстоев при возможности изменения фаз выстоев.
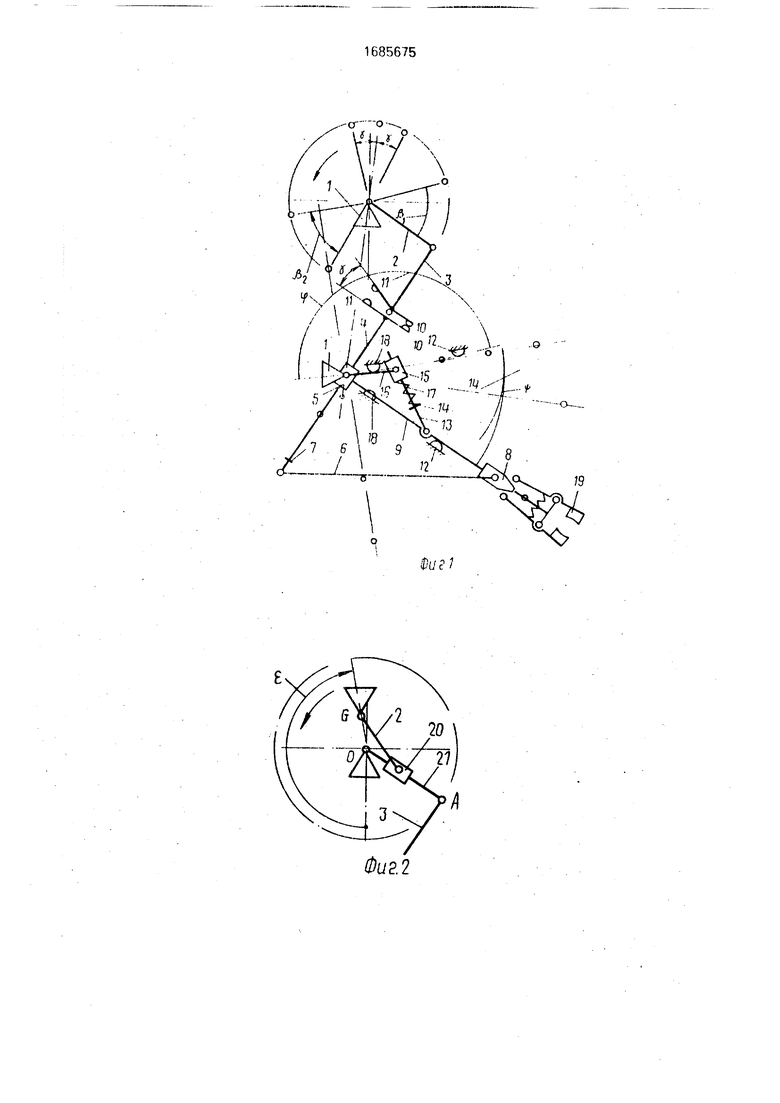
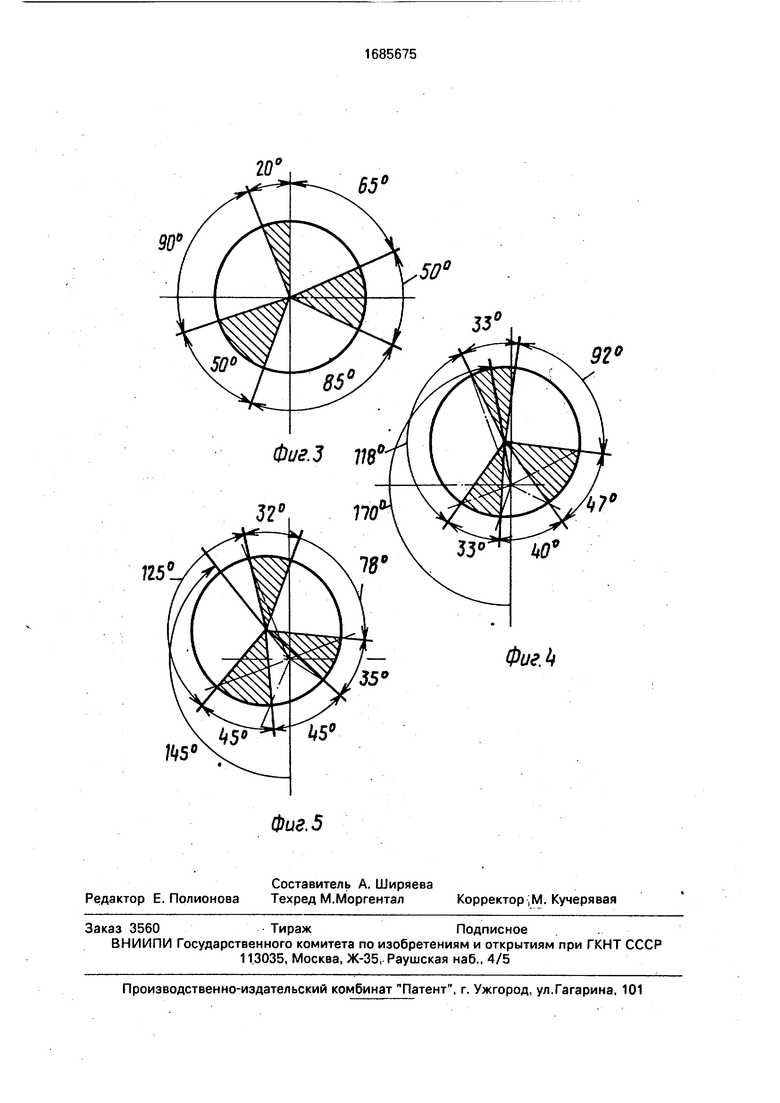
На фиг. 1 показана кинематическая схема автооператора; на фиг. 2 - кинематическая связь кривошипа с шатуном
автооператора; на фиг. 3 - циклограмма движения механической руки для основного механизма (заштрихованы углы, соответствующие выстоям); на фиг. 4 - циклограмма движения механической руки дчя модификации с углом f 170°; на фиг. 5 - то же. с углом с 145°.
Автооператор состоит из основания 1, кривошипно-шатунного механизма, кривошип 2 которого шарнирно закреплен на основании 1 и связан с шатуном 3. длина которого равна длине кривошипа 2(г) Другой конец шатуна 3 шарнирно связан с кулисой 4 основного кулисного механизма. Кулисный камень 5 этого кулисного механизма шарнирно установлен на основании 1, и расстояние между точкой крепления кривошипа 2 к основанию 1 и точкой крепления кулисного камня 5 равно L. Другой конец кулисы 4 шарнирно связан со стержнем 6 и несет упор 7. Стержень 6 шарнирно связан с ползуном 8, установленным на механической руке 9. На сопряженных концах шатуна 3 и кулисы 4 имеются две пары упоров 10 и 11, ограничивающих вращение шарнира углом у (фиг. 1), равным углу поворота кривошипа 2, соответствующему промежуточному выстою. При смыкании упоров 10 шатун 3 и кулиса 4 лежат на одной прямой линии. К кулисному камню 5 жестко присоединена механическая рука 9 в виде стержня. В крайних положениях своего качания механическая рука 9 контактирует с упорами 12, установленными на основании 1. Первое крайнее положение механическая рука 9 занимает при совпадении кулисы 4 с касательной, проведенной из точки крепления кулисного камня 5 к окружности, описываемой концом кривошипа 2 при сомкнутых упорах 10. Второе крайнее положение механическая рука занимает при перпендикулярности кулисы 4 к кривошипу 2 при сомкнутых упорах 11. Угол качания гр механической руки 9 равен
V arcsln(-) + arcsln (1 - sin у).
На механической руке 9 шарнирно закреплена кулиса 13 с упором 14 дополнительного кулисного механизма. Свободный конец кулисы 13 проходит через кулисный камень 15, шарнирноукрепленный на коромысле 16, который другим концом шарнирно установлен на основании 1 в точке крепления кулисного камня 5 независимо от него. Между упором 14 и кулисным камнем 15 на кулису 13 надета пружина 17с предварительным сжатием. Угол качания коромысла 16 ограничен упорами 18, установленными на основании 1 симметрично относительно биссектрисы угла 1/ качания механической руки 9. Угол качания коромысла 16 должен быть на 2-3° меньше угла р. На конце механической руки 9 установлен схват 19, выполненный в виде двух зажимных рычагов, кинематически связанных с ползуном 8, выполненным в виде клина.
В модификации автооператора (фиг. 2) к концу кривошипа 2 шарнирно присоединен
промежуточный кулисный камень 20 промежуточного кулисного механизма, один конец кулисы 21 этого механизма шарнирно установлен на основании 1, а другой конец
шарнирно соединен с шатуном 3, длина которого равна длине кулисы 21, Соотношение длин кривошипа 2 и шатуна 3 может быть произвольное. Расстояние между центрами вращения кривошипа 2 и кулисы 21
меньшей длины кривошипа 2. Угол сможет изменяться с последующей фиксацией. Для этой модификации L - расстояние между центрами вращения промежуточной кулисы 21 и кулисным камнем 5, у - угол, равный
повороту кулисы 21, соответствующий промежуточному выстою, г - длина кулисы 21 или шатуна 3.
Автооператор работает следующим образом. Кривошип 2 вращается (фиг. 1). При
прохождении им угла arccos(1 - sin у) происходит вращение шарнира до контакта упоров 10. Механическая рука 9 прижата пружиной 17 к упору 12 и неподвижна. Шарнир на конце кулисы 4 движется вверх,
ползун 8 вправо и своей клиновой поверхностью сжимает зажимные рычаги схвата 19. Кривошип 2 начинает отрабатывать угол совпадении кулисы 4 и шатуна 3 с касательной, проведенной из точки крепления кулисного камня 5 с окружности, описываемой концом кривошипа 2, упоры 10 в этот момент сомкнуты. При смыкании упоров 1 кулиса 4 начинает поворачиваться вокруг точки крепления кулисного камня 5 вместе с механической рукой 9. Схват 19 в это время сжат и удерживает деталь (на чертеже не показана). При достижении кривошипом 2 положения, определяемого углом у от вертикальной линии, упор 7
упирается в кулисный камень 5, кулиса 4 не может больше перемещаться вверх. При проходе кривошипом 2 угла у он совпадает с шатуном 3, упоры 11 размыкаются, а упоры 10 смыкаются. При
прохождении кривошипом 2 угла у, лежащего с другой стороны от вертикали, кулиса 4 вместе с механической рукой 9 неподвижна. Происходит второй выстой. Схват 19 в это время сжат и держит деталь, которая
подвергается обработке. После прохождения кривошипом 2 угла у упоры 11 смыкаются, кулиса 4 механической рукой 9 вновь получает вращение вокруг точки крепления кулисного камня 5, которое продолжается
до тех пор, пока кривошип 2 не займет положения, перпендикулярного кулисе 4. В этот момент механическая рука 9 подходит к своему второму крайнему положению, угол установится меньше 180°, меняется
направление крутящего момента от силы сжатой пружины 17, который резко поворачивает коромысло 16 до контакта с упором 18. Механическая рука 9 в это время прижимается силой сжатой пружины 17 к упору 12. При прохождении кривошипом 2 угла (h происходит вращение шарнира до смыкания упоров 10. Кулиса 4 в это время не вращается вокруг точки крепления кулисного камня 5, а двигается посту- пательно относительно кулисного камня 5 вниз. Ползун 8 двигается влево и разжимает схват 19. который освобождает обработанную деталь. Механическая рука 9 все это время неподвижна. При смыкании упо- ров 10 кулиса 4 совместно с механической рукой 9 получает вращение вокруг точки крепления кулисного камня 5 в обратную сторону в исходную позицию. При подходе к ней вновь меняется направление крутя- щего момента от силы сжатой пружины 17, который резко поворачивает коромысло 16 до контакта с упором 18. Пружина 17 снова прижимает механическую руку 9 к упору 12. Схват 19 в это время разжат и готов принять новую деталь. Циклограмма работы механической руки 9 показана на фиг. 3.
Модификация автооператора работает аналогично, только в ней колебание кулисы 4 и ее движение относительно кулисного камня 5 производится от кривошипа 2 через кулису 21 промежуточного кулисного механизма (фиг. 2), которая совершает полный оборот с неравномерной скоростью. Изменяя значения угла п, возможно получить угол вращения кривошипа 2, соответствующий промежуточному выстою, который будет больше или меньше угла у. аналогичные преобразования можно произвести с углами, соответствующими первому и третье- му выстоям . На фиг. 4 и 5 показаны циклограммы работы механической руки 9 при угле е 170° и Ј 145°.
Автооператор обеспечивает получение трех точных выстоев, изменение фаз высто- ев посредством изменения соотношения длин звеньев автооператора. Модификация автооператора позволяет изменять соотношение между фазами выстоев.
Формула изобретения
1. Автооператор, содержащий основание, кривошипно-шатунный механизм, кривошип которого шарнирно установлен на
основании, а шатун - кинематически связан с механической рукой, несущей схват, о т - личающийся тем, что, с целью расширения технологических возможностей за счет обеспечения трех точных выстоев механической руки на траектории ее перемещения, он снабжен коромыслом, стержнем и двумя кулисными механизмами - основным и дополнительным, а схват выполнен в виде ползуна, размещенного на конце механической руки, и двух зажимных рычагов, взаимодействующих с ползуном, причем кулиса основного кулисного механизма и шатун кривошипно-шатунного механизма снабжены парой упоров, размещенных на смежных концах кулисы и шатуна с возможностью их поочередного взаимодействия друг с другом, а другой конец этой кулисы шарнирно связан с ползуном схвата посредством стержня, при этом механическая рука жестко связана с кулисным камнем основного кулисного механизма, шарнирно установленного на основании посредством дополнительно введенной оси, а кулиса дополнительного кулисного механизма шарнирно связана с механической рукой и имеет подпружиненный кулисный камень, установленный на коромысле, которое шарнирно закреплено на одной оси с кулисным камнем основного кулисного механизма.
2.Автооператор по п. 1, о т л и ч а ю- щ и и с я тем, что длина кривошипа равна длине шатуна, а длина кулисы основного кулисного механизма равна сумме расстояния между точками крепления кривошипа и кулисного камня основного кулисного механизма и половины длины этого кулисного камня.
3.Автооператор по п. 1,отличающий с я тем, что кривошипно-шатунный механизм снабжен промежуточным кулисным механизмом, кулисный камень которого шарнирно установлен на конце кривошипа, а кулиса одним концом шарнирно связана с основанием, а другим - с шатуном, причем длина этой кулисы равна длине шатуна, а длина кулисы основного кулисного механизма равна сумме расстояния между точками крепления кулисы промежуточного кулисного механизма и кулисного камня основного кулисного механизма и половины длины кулисного камня основного кулисного механизма.
-о/9
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1991 |
|
SU1799726A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| Кривошипно-кулисный механизм с выстоем | 1988 |
|
SU1518601A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Шайбонавивочный автомат | 1979 |
|
SU810347A1 |
| Промышленный робот | 1983 |
|
SU1129069A1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
Изобретение относится к машиностроению, а именно к автооператорам, и может быть использовано для автоматизации загрузки-выгрузки технологического оборудования. Целью изобретения является расширение технологических возможностей за счет получения трех выступов при возможности изменения времени выстоев. Автооператор состоит из основания 1 кри- вошипно-шатунного механизма, кинематически связанного посредством кулисных механизмов - основного и дополнительного с механической рукой 9,несущей схват 19. Причем кривошип 2 и кулисный камень 5 основного кривошипного механизма шар- нирно установлен на основании 1, а кулиса 4 этого механизма одним концом шарнирно связана с шатуном кривошипно-шатунного механизма, а другим концом - шарнирно со стержнем 6, связанным с ползуном 8 схвата 19. Для обеспечения промежуточного выступа длина кулисы 4 должна быть равна сумме расстояния между точками крепления кривошипа 2 и кулисного камня 5 и половинедлины кулисного камня 5, а длина кривошипа 2 равна длине шатуна 3. Кроме этого, кулиса 13 дополнительного кулисного механизма подпружинена относительно кулисного камня 15 и шарнирно связана с механической рукой 9. а кулисный камень 15 установлен на коромысле 16, конец которого установлен на одной оси с кулисным камнем 5. Модификация автооператора с промежуточным кулисным механизмом, кулиса которого закреплена на основании 1, шарнирно связана с шатуном 3, а кулисный камень связан с кривошипом 2 и позволяет изменять фазы выстоев. При этом длина кулисы равна длине шатуна 3. 2 з.п ф-лы. 5 ил СО С о 00 ел о VJ ел
Фиг.2
WS
W
ФиеМ
| Автооператор | 1985 |
|
SU1296402A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
