Изобретение относится к грузоподъемным механизмам, в частности к захватам- кантователям для грузов цилиндрической формы, например, к бочкам, навешиваемым на крюк крана.
Известен захват-кантователь, содержащий Г-образную траверсу, один конец кото- рой связан через трос и блок с грузо подъемным механизмом, при этом на траверсе шарнирно закреплена захватная лапа. Кроме того, на траверсе закреплен соединенный с одним концом троса шар- нирно-рычажный параллелограмм, одна из сторон которого образована захватной лапой, а на противоположной стороне параллелограмма закреплена защелка. Траверса захвата снабжена еще и захватной скобой, взаимодействующей с защелкой для удержания захватной лапы в раскрытом положении.
Недостаток известного захвата-канто- вателя состоит в том, что нельзя производить строповку, кантование и транспортировку различных по габаритам
грузов. Кроме того, кантование груза обладающего большим весом,очень затруднено, так как оно осуществляется только лишь благодаря наличию в захвате противовеса.
Более того, известная конструкция захвата не отвечает условиям надежности, а следовательно и техники безопасности, что не маловажно при подъеме, кантовании и транспортировке грузов.
Известным захватом захватом-кантова- телем неудобно производить наклон груза на небольшой угол, так как удерживание груза на весу надо, производить вручную, посредством противовеса.
За прототип принят захват-кантователь, содержащий два параллельно расположенных основания, соединенных между собой телескопической тягой и узел канто- вания, включающий гибкую тягу, натяжной и передающие элементы, сопряженные с гибкой тягой и элемент подвеса.
Недостаток известного захвата-канто- вателя состоит в том, что нельзя производить подъем и кантование груза, наклон его
ел С
vj о
00
ел
N3
на любой необходимый угол, причем-не только с пола, но и на весу. Также у известного захвата нет фиксации груза, что может привести к его выпадэнию. Исходя из этого, известная конструкция захвата не отвечает условиям надежности, а следовательно, и технике безопасности, что не маловажно при подъеме,кантовании и транспортировке груза. -.- .
Цель изобретения достигается тем, что захват-кантователь содержит основания, выполненные на концах с ограничителями для груза, а захват-кантователь снабжен разъемным фиксатором для фиксации телескопической тяги и поворотными роликами для перемещения по опорной поверхности в разных направлениях, размещенными по разные стороны нижнего основания, при этрм гибкая тяга одним концом прикреплена снаружи верхнего основания, а другим концом к нижней части телескопической тяги, причем натяжной элемент прикреплен к верхнему концу телескопической тяги, а передающий элемент выполнен в виде звездочки, прикрепленной к элементу подвеса, который расположен в плоскости вертикальной оси симметрии верхнего основания.
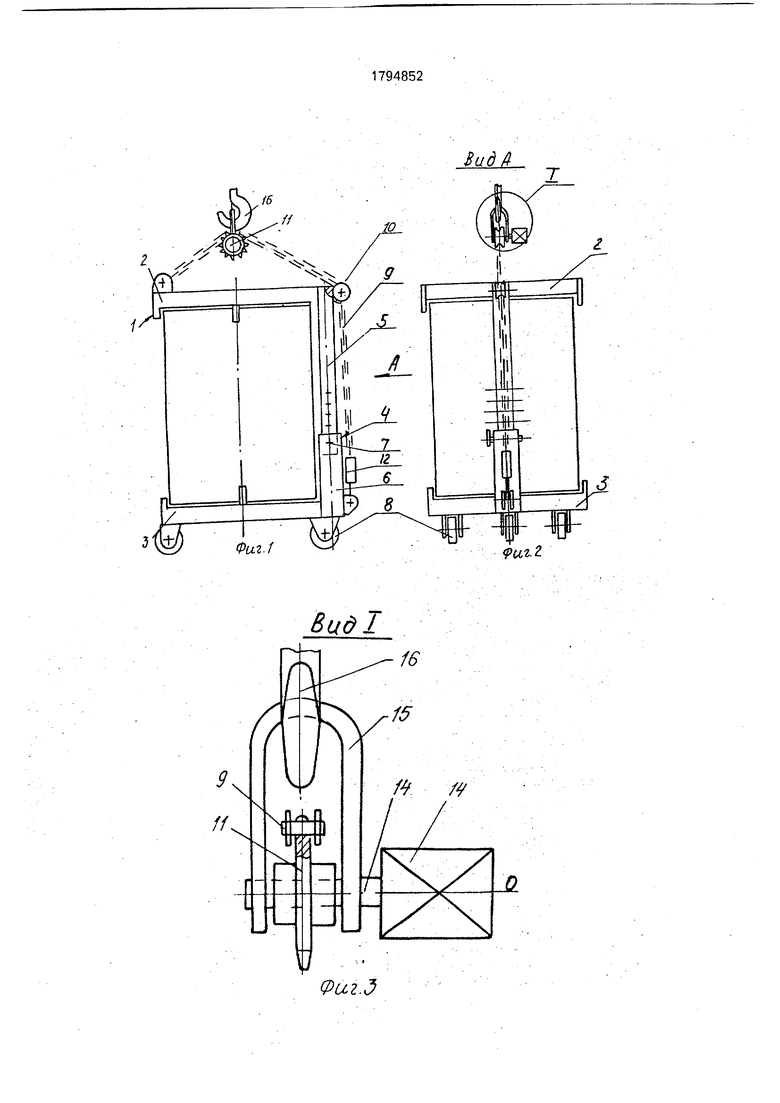
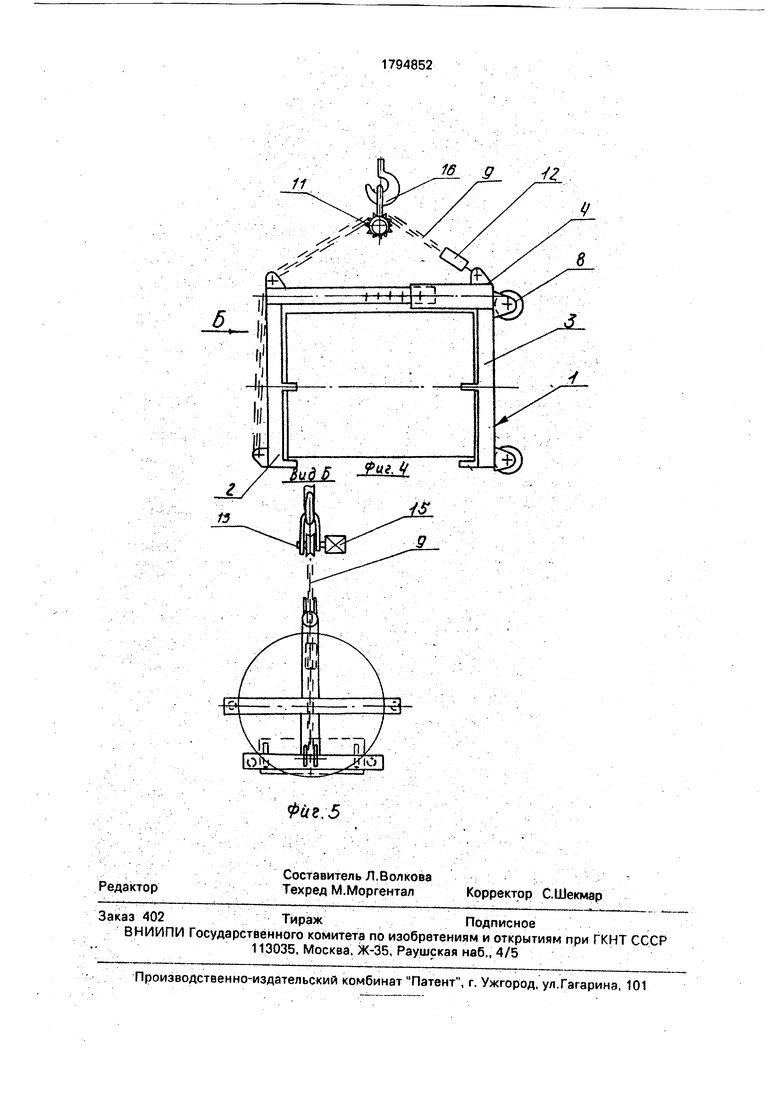
На фиг. 1 изображен общий вид захвата; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - вид захвата-кантовэте- ля в положении II; на фиг. 5 - вид Б на фиг. 4.: ; .
Захват-кантователь содержит устройст- во для захвата груза 1, выполненное в виде двух параллельно установленных оснований: верхнего 2 и нижнего 3, соединенных между собой телескопической тягой 4. Тяга 4 выполнена из двух тяг верхней 5 и нижней 6, соединенных между собой разъемным фиксатором 7, Нижнее основание 3 устройства 1 снабжено поворотными роликами 8 для перемещения по опорной поверхности в разных направлениях. Устройство содержит узел кантования, включающий гибкую тягу одним концом прикреплена снаружи верхнего основания, а другим концом - к нижней части телескопической тяги, причем
натяжной элемент 10 прикреплен к верхнему концу телескопической тяги, передающий элемент 11 выполнен в виде звездочки, элементы 10 и 11 сопряжены с гибкой тягой 9 и с элементом подвеса 12, который расположен в плоскости вертикальной оси симметрии верхнего основания 12, Гибкая тяга 9 взаимодействует со звездочкой 11 и регулируется по длине посредством талрепа 12. Звездочка 11 жестко закреплена на очи 13,
один конец которой взаимодействует с приводом 14. Ось 13 щарнирно установлена на петле 15, накинутой на крюк 16 грузоподъемного механизма. Захват-кантователь работает следующим образом,
На бочку или какой другой цилиндрический груз, установленный в положении II (фиг. 4) устанавливают устройство 1 для захвата груза. При этом регулируют посредством разъемного фиксатора 7
телескопическую тягу 4 и гибкую тягу 9 по длине груза. Затем опускают крюк 16 и на крюк навешивают петлю 15 со звездочкой 11, взаимодействующей с гибкой тягой 9. После подъема груза включают привод 14 и
звездочку, жестко скрепленные с осью 13, начинают вращаться. При этом зубья звездочки 11 находятся в зацеплении с гибкой тягой 9, выполненной в виде пластинчатой цепи, также начинают перемещать за собой
гибкую тягу 9. Благодаря жесткому креплению гибкой тяги 9 к устройству 1, груз так же будет совершать перемещения. Кантование груза можно осуществить на угол в 90° . Затем, сняв пластинчатую цепь со звездочки,
можно откатить устройство 1 с грузом в удобное для этого место. Освободить груз от устройства 1 можно посредством разъемного фиксатора 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь | 1982 |
|
SU1025645A1 |
| Захват-кантователь для грузов цилиндрической формы | 1987 |
|
SU1504199A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Захват-кантователь для труб | 1982 |
|
SU1041487A1 |
| Захват-кантователь | 1984 |
|
SU1315377A1 |
| Захват-кантователь для грузов | 1976 |
|
SU734123A1 |
| Захват-кантователь | 1978 |
|
SU796162A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| Захват-кантователь | 1989 |
|
SU1726358A1 |
Изобретение относится к грузоподъемным механизмам, в частности к захватам- кантователям для грузов цилиндрической формы, например бочкам, навешиваемым на крюк крана. Сущность изобретения: основания выполнены на концах с ограничителями для груза, а захват-кантователь снабжен разъемным фиксатором для фиксации телескопической тяги и поворотными роликами для перемещения по опорной поверхности в разных направлениях. Гибкая тяга прикреплена снаружи верхнего основания одним концом, а другим концом - к нижней части телескопической тяги. Передающий элемент выполнен в виде звездочки. 5 ил.
Формула изобретения Захват-кантователь:, содержащий два параллельно расположенных основания, соединенных между собой телескопической тягой, и узел кантования, включающий гибкую тягу, натяжной и передающий элементы, сопряженные с гибкой тягой, и элемент подвеса, отличающийся тем, что, с целью обеспечения сохранности груза, основания выполнены на концах с ограничителями для груза, а захват-кантователь снабжён разъемным фиксатором для фиксации телескопической тяги и поворотными
роликами для перемещения по опорной поверхности в разных направлениях, размещенными по разные стороны нижнего основания, при этом гибкая тяга одним концом прикреплена снаружи верхнего основания, а другим концом к нижней части телескопической тяги, причем натяжной элемент прикреплен к верхнему концу телескопической тяги, а передающий элемент выполнен в виде звездочки, прикрепленной к элементу подвеса, который расположен в плоскости, вертикальной оси симметрии верхнего основания.
Вид
Фиг.д
| Меламед С.М | |||
| Автоматические захваты для штучных грузов | |||
| М | |||
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
