sl
к
00
СП 00
Изобретение относится к грузозахватным устройствам.
Известен захват-кантователь, содержащий раму с захватными органами и закрепленными на ней посредством осей блоками, траверсу со стойками, выполненными с вертикальными пазами, в которых размещены оси блоков, и установочными опорами на концах,дополнительную траверсу, связанные с ней гибкие тяги, огибающие блоки рамы и прикрепленные к основной траверсе.
Недостатком данного устройства является то, что дополнительная траверса во время кантования поворачивается на угол 180° и увлекает за собой крюк крана, на котором висит захаат-кантователь. Кроме того, рама с захватными органами не имеет защитного кожуха, который бы предохранял груз от рассыпания в сторону.
Целью изобретения является повышение удобства эксплуатации путем исключения пресыпзния груза,
Указанная цель достигается тем, что в зохпате-кантовагеле, содержащем раму с ;к затнымм органами и закрепленными на ме/i посредством осей блоками, траверсу со слойками, выполненными с вертикальными пазами, в которых размещены оси блоков, и установочными опорами на концах, допол- нительную траверсу, связанные с ней гибкие тяги, огибающие блоки рамы и прикрепленные к основной траверсе, дополнительная траверса снабжена установленными на ней поворотными блоками, размещена и установлена концами в упомянутых вертикальных лазах с возможностью перемещения, при этом гибкие тяги выполнены замкнутыми и огибают поворотные блоки, а рама снабжена установленным на упомянутых осях с возможностью поворота кожухом с упорами для взаимодействия с установочными опорами.
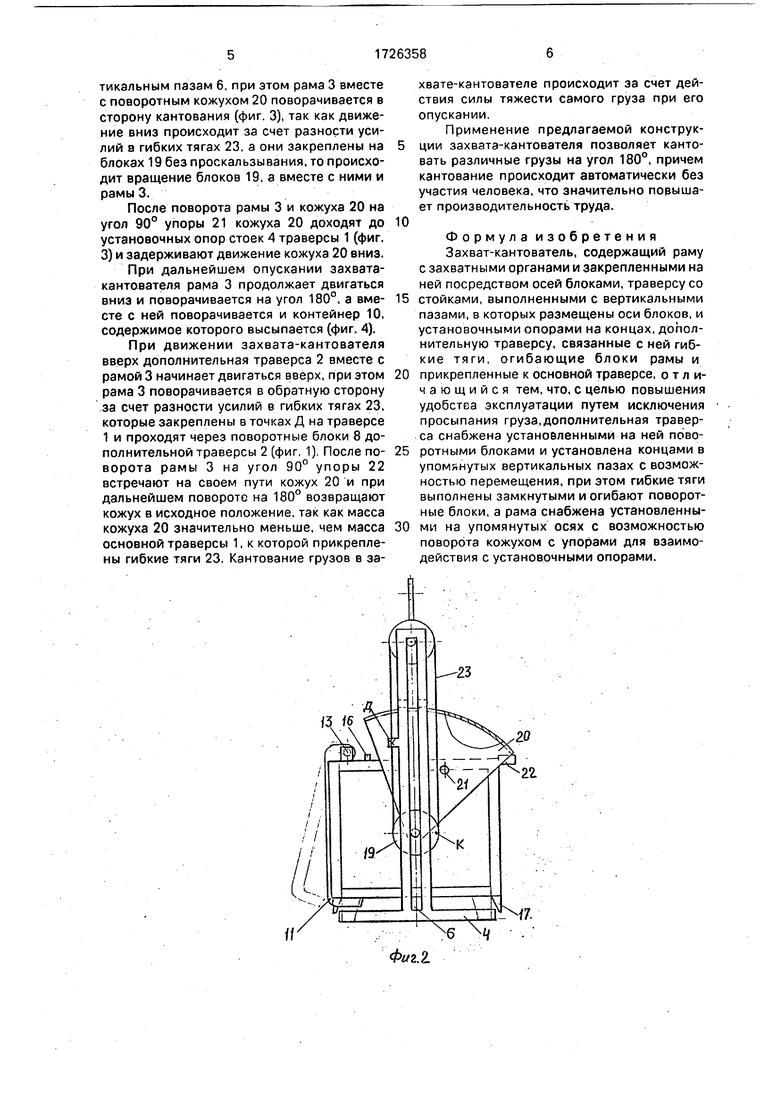
На фиг. 1 изображен захват-кантователь, общий вид; на фиг. 2 -тоже, вид сбоку; на фиг. 3 - захват-кантователь, повернутый на 90°; на фиг. 4 - захват-кантователь, повернутый на 180°.
Захват-кантователь содержит траверсу 1, дополнительную траверсу 2 и раму 3, Тра- верса 1 состоит из двух стоек 4, жестко связанных между собой поперечиной 5. 8 стойках 4 выполнены вертикальные направляющие пазы 6.
Дополнительная траверса 2 содержит вал 7 с двумя поворотными блоками 8 и проушину 9 для навешивания на крюк подъемного механизма.
Рама 3 выполнена таким образом, что охватывает контейнер 10 по периметру. На
одной из сторон рамы имеются поворотные С-образные захватные лапы 11, жестко связанные между собой поперечиной 12, Лапы 11 установлены на осях 13,закрепленных в кронштейнах типа проушин 14, которые жестко закреплены на раме 3. Лапы снабжены фиксатором 15. Упоры 16 жестко закреплены на раме 3 и являются ограничителями при надевании рамы 3 на контейнер 10. Рама 3 висит на упорах 16, которые опираются на верхнюю часть контейнера 10. Кроме того, упоры 16 удерживают пустой контейнер 10 после поворота рамы 3 на 180°. В нижней части рамы J закреплены ловители 17 для наведения рамы 3 на контейнер 10,
С двух противоположных сторон рамы 3 жестко закреплены оси 18 и блоки 19. На осях 18 установлен поворотный кожух 20, который имеет упоры 21, взаимодействующие с установочными опорами стоек 4 траверсы 1. Концы осей 18 входят в вертикальные направляющие пазы 6 траверсы 1. Рама 3 имеет также упоры 22, при помощи которых она возвращает поворотный кожух 20 в исходное положение. Гибкие замкнутые тяги 23 охватывают блоки 19 и поворотные блоки 8 дополнительной траверсы 2, концы которой входят в вертикальные направляющие пазы 6 траверсы 1. Одна ветвь гибких тяг 23 закреплена на траверсе 1 в точке Д.
С целью исключения проскальзывания гибких тяг 23 во время кантования они закреплены в блоках 19 в точках К.
Захват-кантователь работает следующим образом.
Захват-кантователь, навешенный на крюк подъемного механизма, опускают сверху на контейнер 10, при этом лапы 11 отведены в сторону (фиг. 2) и зафиксированы фиксатором 15. Ловители 17 помогают ориентировать за- хват-кантовзтель относительно контейнера 10. Опускание захвата-кантователя производится до тер пор, пока рама 3 не упрется своими упорами 16 в верхнюю часть контейнера 10. Затем лапы 11 заводят под дно контейнера 10 и фиксируют фиксатором 15 (фиг. 1), Таким образом, контейнер 10 охватывается рамой 3 со всех сторон, даже снизу, где заведены захватные лапы 11. В этом положении дополнительная траверса 2 занимает самое верхнее положение в вертикальных направляющих пазах 6 траверсы 1, которая висит на дополнительной траверсе 2 (фиг. 2). Затем захват-кантователь вместе с контейнером 10 поднимают и транспортируют к месту кантования, где его устанавливают на опоры бункера.
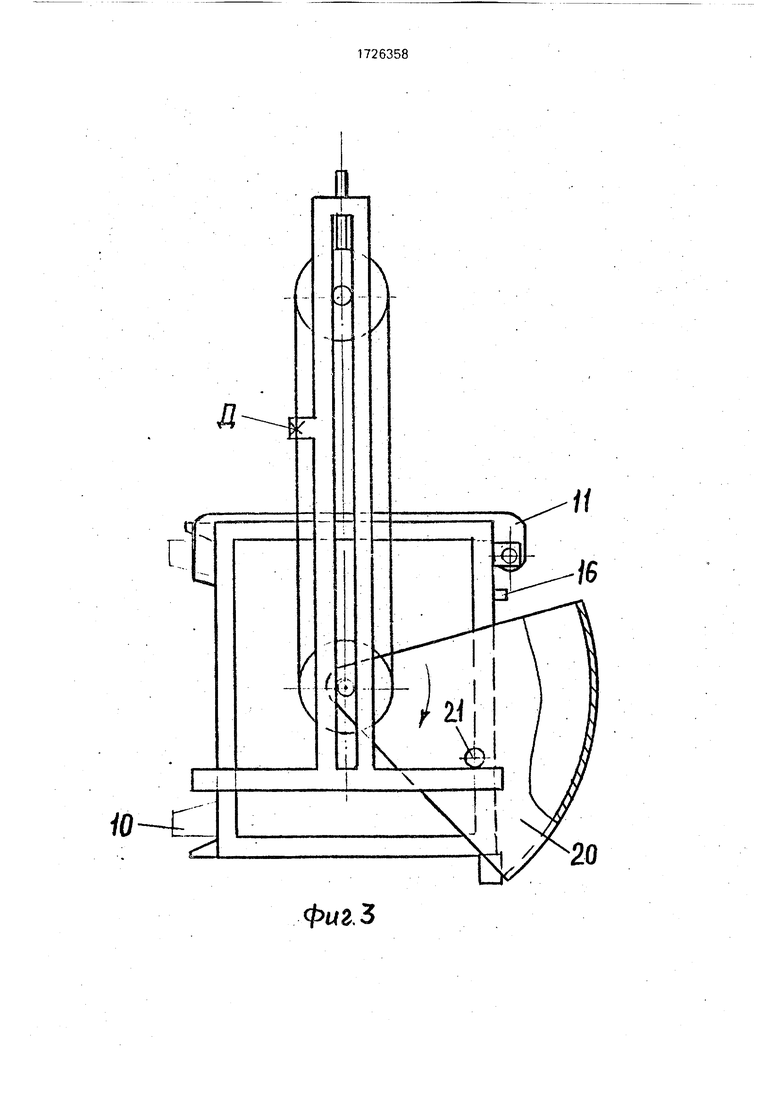
При опускании захвата-кантователя траверса 1 останавливается на опорах бункера, а дополнительная траверса 2 вместе с рамой 3 продолжают двигаться вниз по вертикальным пазам 6, при этом рама 3 вместе с поворотным кожухом 20 поворачивается в сторону кантования (фиг. 3), так как движение вниз происходит за счет разности усилий в гибких тягах 23, а они закреплены на блоках 19 без проскальзывания, то происходит вращение блоков 19, а вместе с ними и рамы 3.
После поворота рамы 3 и кожуха 20 на угол 90° упоры 21 кожуха 20 доходят до установочных опор стоек 4 траверсы 1 (фиг. 3) и задерживают движение кожуха 20 вниз.
При дальнейшем опускании захвата- кантователя рама 3 продолжает двигаться вниз и поворачивается на угол 180°, а вместе с ней поворачивается и контейнер 10, содержимое которого высыпается (фиг. 4).
При движении захвата-кантователя вверх дополнительная траверса 2 вместе с рамой 3 начинает двигаться вверх, при этом рама 3 поворачивается в обратную сторону за счет разности усилий в гибких тягах 23, которые закреплены в точках Д на траверсе 1 и проходят через поворотные блоки 8 дополнительной траверсы 2 (фиг. 1). После поворота рамы 3 на угол 90° упоры 22 встречают на своем пути кожух 20 и при дальнейшем повороте на 180° возвращают кожух в исходное положение, так как масса кожуха 20 значительно меньше, чем масса основной траверсы 1, к которой прикреплены гибкие тяги 23. Кантование грузов в за0
5
0
5
0
хвате-кантователе происходит за счет действия силы тяжести самого груза при его опускании,
Применение предлагаемой конструкции захвата-кантователя позволяет кантовать различные грузы на угол 180°, причем кантование происходит автоматически без участия человека, что значительно повышает производительность труда.
Формула изобретения Захват-кантователь, содержащий раму с захватными органами и закрепленными на ней посредством осей блоками, траверсу со стойками, выполненными с вертикальными пазами, в которых размещены оси блоков, и установочными опорами на концах, дополнительную траверсу, связанные с ней гибкие тяги, огибающие блоки рамы и прикрепленные к основной траверсе, отличающийся тем. что, с целью повышения удобства эксплуатации путем исключения просыпания груза.дополнительная траверса снабжена установленными на ней поворотными блоками и установлена концами в упомянутых вертикальных пазах с возможностью перемещения, при этом гибкие тяги выполнены замкнутыми погибают поворотные блоки, а рама снабжена установленными на упомянутых осях с возможностью поворота кожухом с упорами для взаимодействия с установочными опорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1985 |
|
SU1382811A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь | 1977 |
|
SU839970A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Захват-кантователь | 1990 |
|
SU1782912A1 |
| ЗАХВАТ-КВАНТОВАТЕЛЬ | 1970 |
|
SU432081A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| Захват-кантователь погрузчика | 1979 |
|
SU867872A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ | 1995 |
|
RU2109675C1 |

Изобретение относится к грузозахватным устройствам и позволяет повысить удобство эксплуатации путем исключения просыпания груза. Захват-кантователь содержит траверсу 1, связанную с дополнительной траверсой 2, и раму 3 с захватными органами. Траверса 1 содержит стойки 4 с установочными опорами на концах. К раме 3 посредством осей 18 прикреплены блоки 19. На осях 18 с возможностью поворота установлен кожух 20, а дополнительная тра- верса 2 снабжена установленными на ней поворотными блоками 8. Гибкие тяги 23 выполнены замкнутыми и огибают блоки 19 и поворотные блоки 8. Применение данной конструкции захвата-кантователя позволяет кантовать различные грузы на угол 180°, причем кантование происходит автоматически без участия человека и при этом обеспечивается исключение просыпания груза. 4 ил.
Фиг.1
1
Г
10-С
Фм2.3
а
/6
i/x20
| Захват-кантователь | 1985 |
|
SU1382811A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
