Изобретение относится к способам для измерения массы груза, поднимаемого грузозахватными механизмами лёсозаготови- тельныхманипуляторов подъемно-транспортных и коммунальных машин.
Известен способ определения суммарной массы погружаемых манипулятором грузов, согласно которому измеряют давление в гидроцилиндре рукояти и определяют по нему массу груза, значение которой суммируют со Значением массы груза, определенной в предыдущих циклах работы манипулятора,
Недостатком этого способа является необходимость определения двух информационных параметров; давления и углового перемещения стрелы гидравлического крана, необходимых для вычисления массы груза; . .;; .:; ; ;. ; .;, у ; , ..-.. . .
Целью изобретения является повышение надежности.
Поставленная цель достигается тем, что в способе измерения суммарной массы погружаемых мобильным манипулятором гру- ЗОВ, включающем измерение Давлений в
гидроцилиндре рукояти, определение массы груза и суммирование с предыдущим значением массы груза, определенной в предыдущих циклах работы, задаются временными интервалами, на границах которых производят измерение давления в гидроцилиндре и при превышении последней заданного значения с выдержкой времени запоминают его, затем определяют скорость нарастания давления по формуле:
Р
Р-А
где Р - измеренное давление в гидроцилин- дре, . .. . . ..,.-.
А - давление в штоковой полости гидроцилиндра без груза при скорости нарастания давления, большей допустимого значения,
Д t - интервал между измерениями давления,
и при превышении последней заданного значения определяют установившуюся амплитуду давления, а суммарную массу-труза определяют по формуле.
ч-
Ё
XI
О 1 00 Os СО
С a/d
Ршт РШТО Ршт -Av
где РШТО - давление в штоковой полости гидроцйлиндра без груза,
d -расстояние между точками подвеса рукояти и ее грузозахватного органа,
а-конструктивная постоянная манипу-
ЛЯТОра,;.-;-vv-- ;;.: . :, .;,:..- :,-.,:. :,,.;. : .... . .... ...1 .-.
Ршт г давление в штоковой полости гидроцйлиндра при подъеме груза. Способ реализован адаптивными устройствами определения суммарной массы
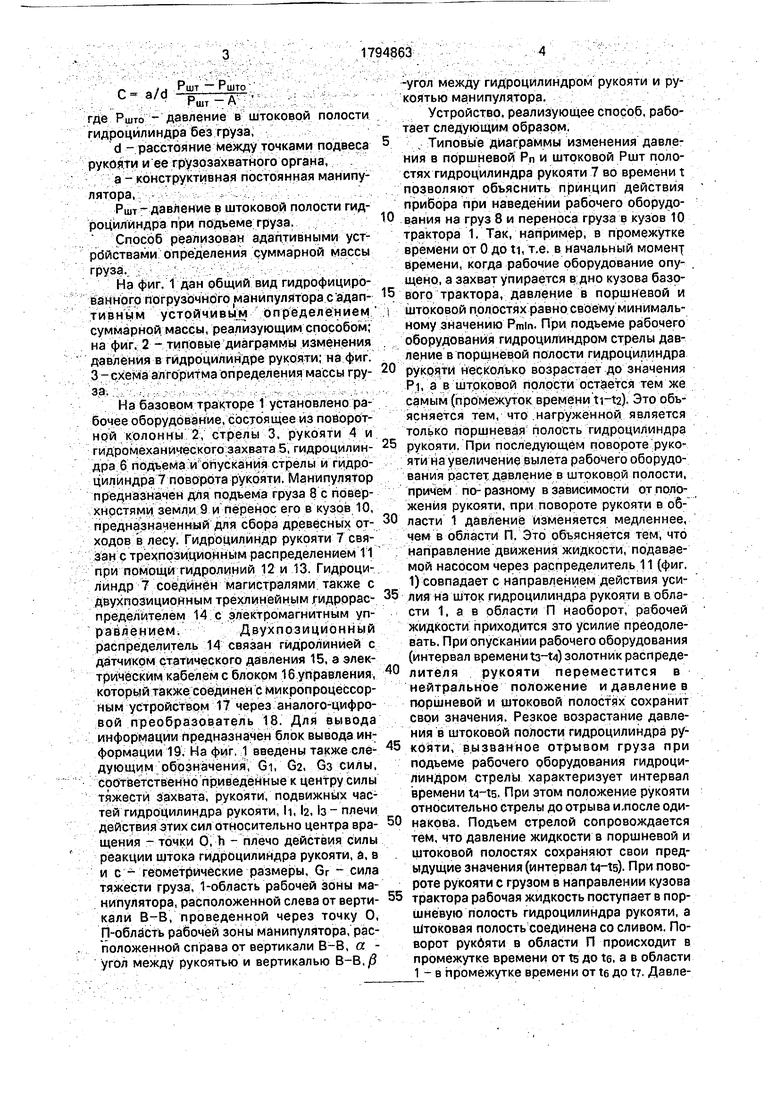
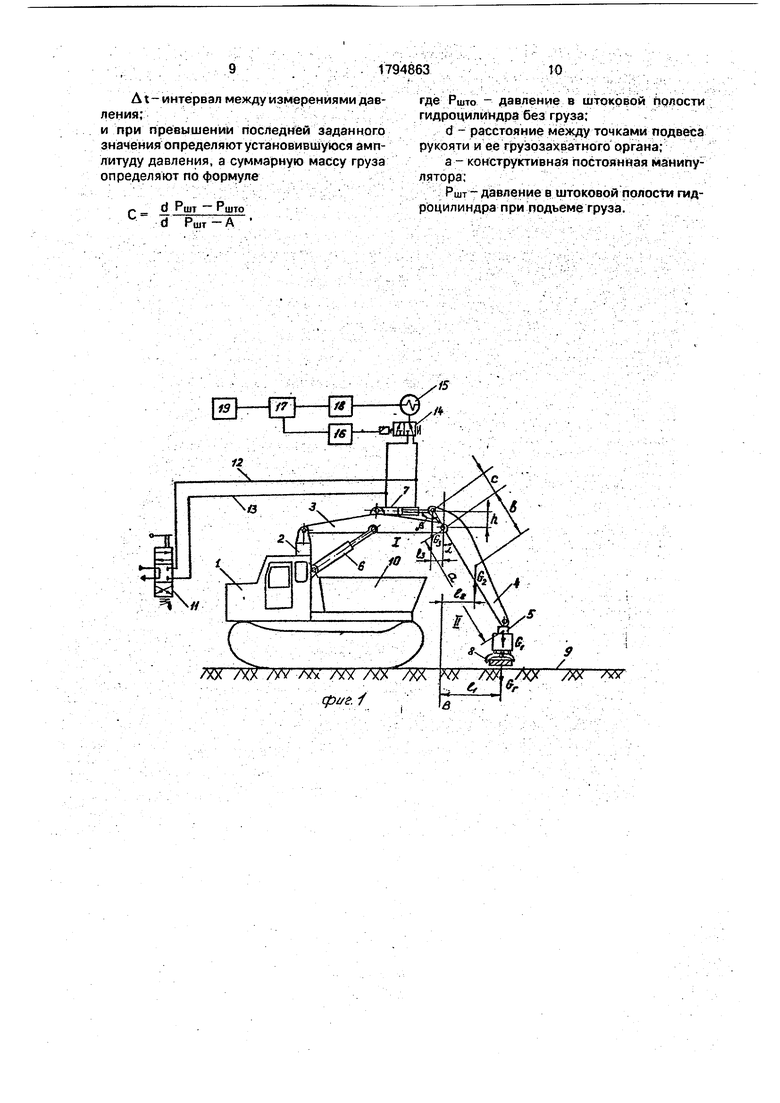
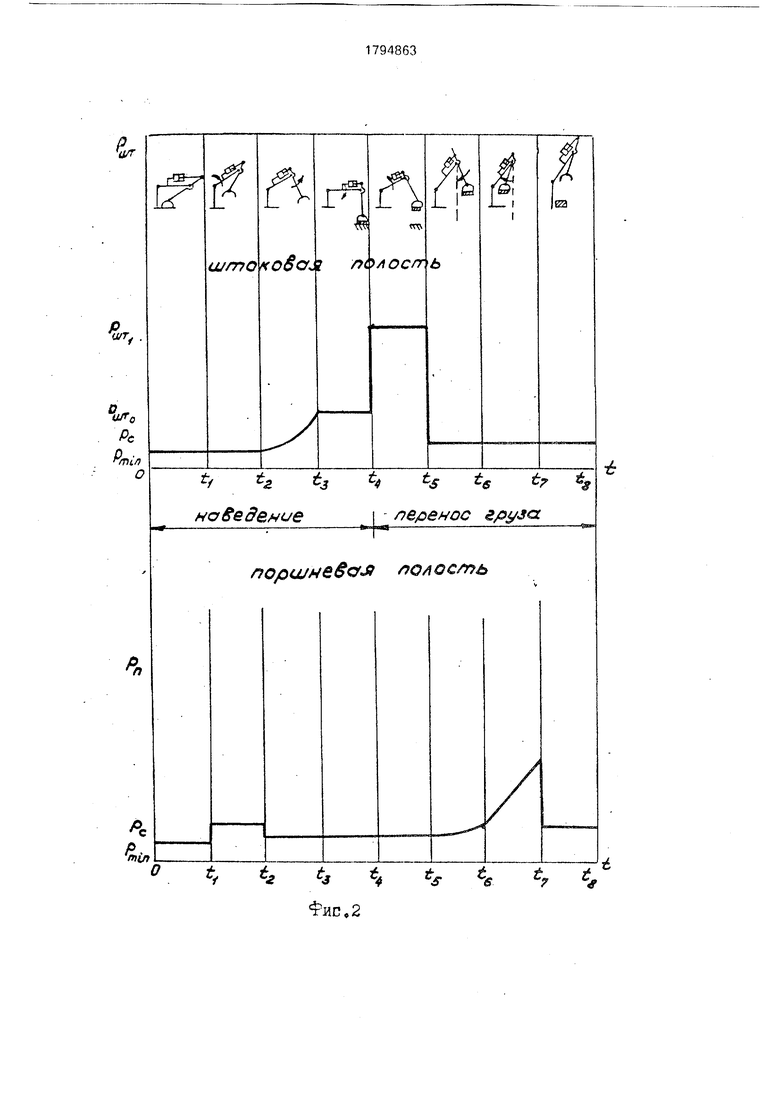
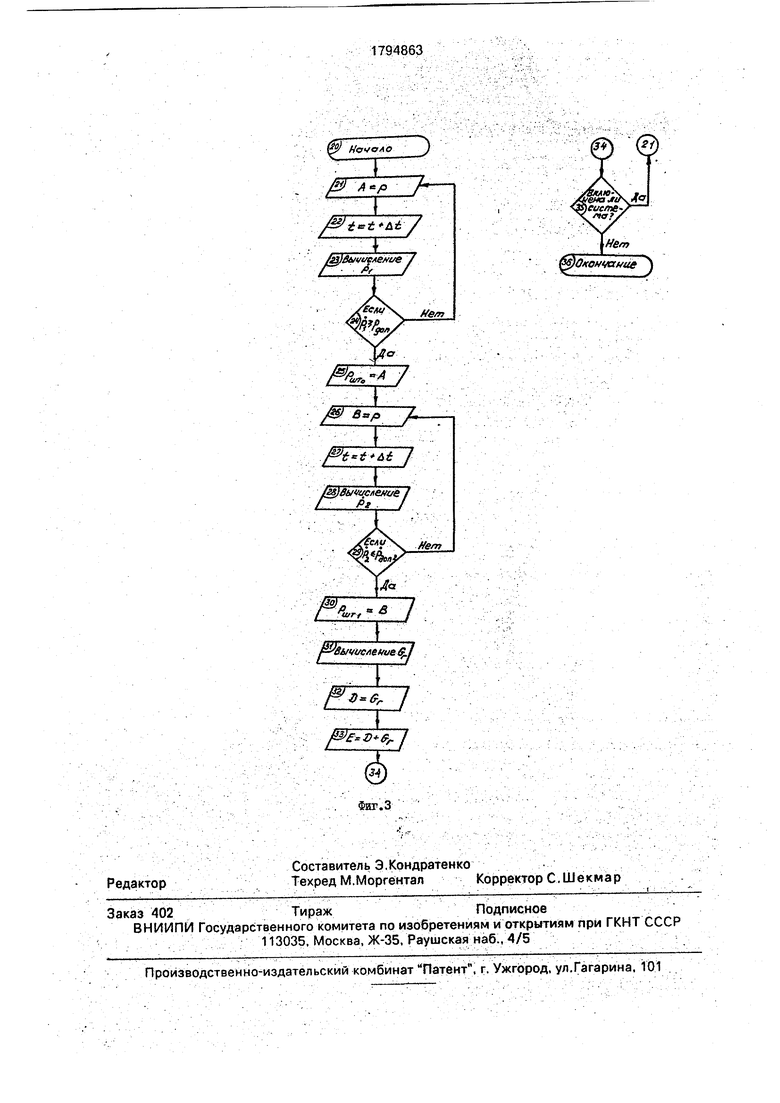
груза., ; ; л.;:/: /:,.....- .:. :.- ..- На фиг. 1 дан общий вид гидрофициро- ёайнргр погрузочного манипулятора с адап- тивным устрйчивьгм определением суммарной массы, реализующим способом; на фиг. 2 - типовые диаграммы изменения давления в гйдррцилиндре рукояти; на фиг. 3-схема алгоритма определения массы гру. 3:3; ,.:-:.;::..;;--Ч-;-.;.;: :,;./;..л. .;.. .. .,.: -: :,:,.J,, ,.
На базовом тракторе 1 установлено рабочее оборудование, состоящее из поворотной колонны 2, стрелы 3, рукояти 4 и гидромеханическогогзахвата 5, гидроцйлиндра б подъемами опускания стрелы и гйдрр- цилйндра 7 поворота рукояти. Манипулятор предназначен для подъема груза 8с поверхностями: землк 9 и перенос его в кузов, 10, предназначенный для сбора древесных отходов в лесу. Гидроцилиндр рукояти 7 свя- зан с трехпрзидйрйным распределением 11 при помощи гидролиний 12 и 13. Гидроци- лйндр 7 соединён магистралями; также с двухпозиционным трёхлинейным .гидрррас- пределйтелем 14 с электромагнитным уп- равяёниеМ;Двухпозиционный распределитель 14 связан гйдролинией с датчиком статического давления 15, а электрическим кабелем с блоком 16 управления, который также соединен с Микропроцессорным устройством 17 через аналого-цифро- врй преобразователь 18. Для вывода информации предназначен блок вывода информации 19. На фиг. 1 введены также следующим обозначения, Gi, Ga, 0;з силы, соответственно приведенные к центру силы тяжести захвата, рукояти, подвижных частей гидроцилиндра рукояти, И, 12,1з - плечи действия этих сил относительно центра вращения -точки О, h - плечо действия силы реакции штока гидроцилиндра рукояти, а, в и с - геомет0ичёские размеры, Gr - сила тяжести груза, 1-область рабочей зоны манипулятора, расположенной слева от вертикали В-В, проведенной через точку О, П-область рабочей зоны манипулятора, рас- .. положенной справа от вертикали В-В, а - угол между рукоятью и вертикалью В-В,/8
-угол между гидроцилиндром рукояти и рукоятью манипулятора.
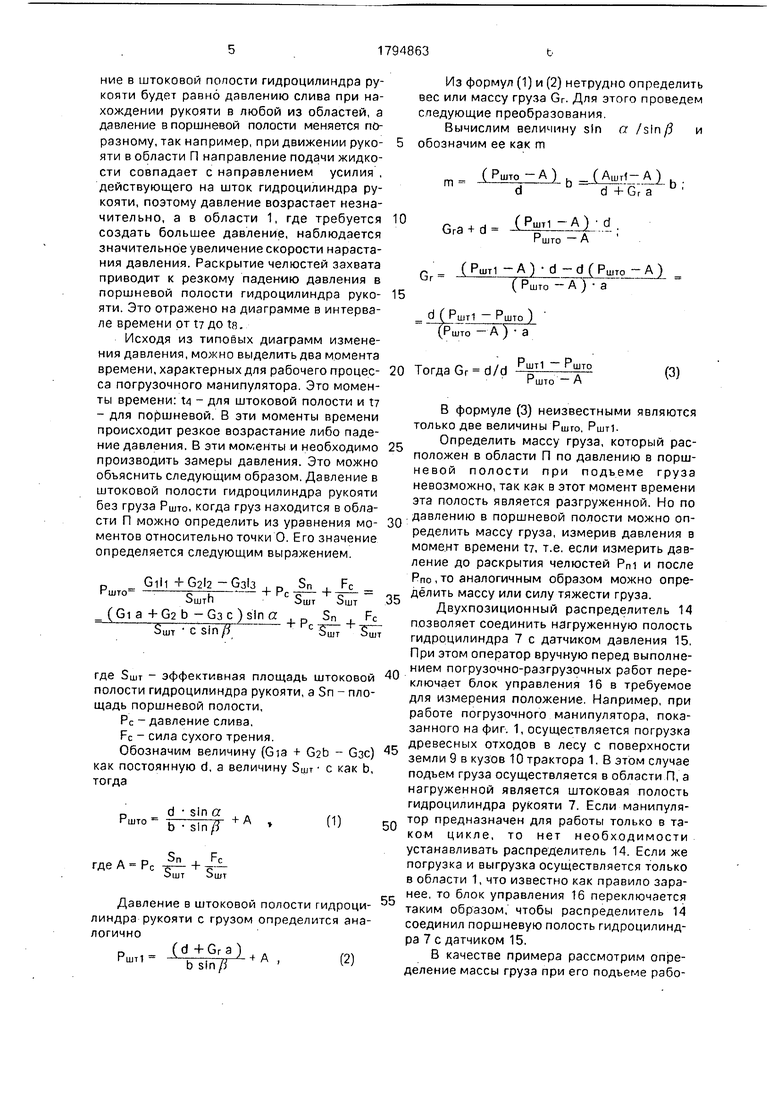
Устройство, реализующее способ, работает следующим образомТиповые диаграммы изменения давления в поршневой РП и штоковой Ршт полостях гидроцилиндра рукояти 7 во времени t позволяют объяснить принцип действия прибора при наведении рабочего оборудо0 вания на груз 8 и переноса груза в кузов 10 трактора 1. Так, например, в промежутке времени от 0 до ti, т.е. в начальный момен времени, когда рабочие оборудование опущено, а захват упирается в;дно кузова базо5 вогр трактора, давление в поршневой и штоковой полостях равно своему минимальному значению Pmin. При подъеме рабочего оборудования гидроцилиндром стрелы давление в поршневой полости гидроцилиндра
0 рукрдти несколько возрастает до значения PI, а в штрковой по л рсти остается тем же самым (промежуток времени ti-ta). Это объясняется тем, что .нагруженной является только поршневая полость гидроцилиндрз
5 рукояти. При последующем повороте рукояти на увеличение вылета рабочего оборудования растет давление в штоковрй полости, причем по-разному в зависимости от положения рукояти, при повороте рукояти в об0 ласти 1 давление изменяется медленнее, чем в области П, Это объясняется тем, что : направление движения жидкости, подаваемой насосом через распределитель 11 (фиг, 1) совпадает с направлением действия уси5 лия на шток гидроцилиндра рукояти в области 1, а в области П наоборот, рабочей Жидкости приходится это усилие преодолевать. При опускании рабочего оборудования (интервал времени ) золотник распреде0 лителя рукояти переместится в нейтральное положение и давление в поршневой и штоковой полостях сохранит свои значения. Резкое возрастание давления в штоковой полости гидроцилиндра ру5 кояти, вызванное отрывом груза при подъеме рабочего оборудования гидроцилиндром стрелы характеризует интервал времени t4-ts. При этом положение рукояти относительно стрелы до отрыва илтосле оди0 накрва. Подъем стрелой сопровождается тем, что давление жидкости в поршневой и . штоковой полостях сохраняют свои предыдущие значения (интервал t/j-ts). При повороте рукояти с грузом в направлении кузова
5 трактора рабочая жидкость поступает в поршневую полость гидроцилиндра рукояти, а Штоковая полость соединена со сливом. Поворот рукбяти в области П происходит в промежутке времени от ts до te, а в области 1 - в промежутке времени от te до п. Давление в штоковой полости гидроцилиндра рукояти будет равно давлению слива при нахождении рукояти в любой из областей, а давление в поршневой полости меняется по- разному, так например, при движении руко- яти в области П направление подачи жидкости совпадает с направлением усилия, действующего на шток гидроцилиндра рукояти, поэтому давление возрастает незначительно, а в области 1, где требуется создать большее давление, наблюдается значительное увеличение скорости нарастания давления. Раскрытие челюстей захвата приводит к резкому падению давления в поршневой полости гидроцилиндра руко- яти. Это отражено на диаграмме в интервале времени от t до ta.
Исходя из типовых диаграмм изменения давления, можно выделить два момента времени, характерных для рабочего гтроцес- са погрузочного манипулятора. Это моменты времени: t4 - для штоковой полости и ty - для поршневой. В эти моменты времени происходит резкое возрастание либо падение давления. В эти моменты и необходимо производить замеры давления. Это можно объяснить следующим образом. Давление в штоковой полости гидроцилиндра рукояти без груза Ршто, когда груз находится в области П можно определить из уравнения мо- ментов относительно точки О. Его значение определяется следующим выражением.
D Gih +G2J2 -Сз1з , D Sn , Fc
гшто- -:----о-С-- -- т с т К- - ощтПошт ошт
+ 62 b - Сз с ) sin a SUJT с sin fi
Sn + Fc SUIT 5шт
+ +
где 5шт - эффективная площадь штоковой полости гидроцилиндра рукояти, a Sn - площадь поршневой полости,
PC - давление слива,
FC - сила сухого трения.
Обозначим величину (Gia + G2b - Сзс) как постоянную d, а величину 5шт- с как Ь, тогда
Р d sln( + дm
Ршто b -sln/3 A П)
где А Рс + ДЗшт ошт
Давление в штоковой полости гидроци- линдра рукояти с грузом определится аналогично
D(d +Gra)
Ршт1 b sin/ +
А ,
(2)
Из формул (1) и (2) нетрудно определить вес или массу груза Gr. Для этого проведем следующие преобразования.
Вычислим величину sin a /sln/З и обозначим ее как m
(Ршто-Aj(Ашт1-А) .
ГУ1 г: -А--------.--------i- г -i---------- ---л.- г
md D d+Gra D
Gra + d
+ d (Ршт1 -A) -d.
Ршто - А
Gr
( РШП - A ) d - d (P
(Ршто -A ) a
ШТО
d ( Рщт1 - Ршто ) (Ршто -А ) a
Тогда Gr d/d
Рщт1 РШТО Ршто A
(3)
В формуле (З) неизвестными являются только две величины РШГО, Ршт1.
Определить массу груза, который расположен в области П по давлению в поршневой полости при подъеме груза невозможно, так как в этот момент времени эта полость является разгруженной. Но по . давлению в поршневой полости можно определить массу груза, измерив давления в моме.нт времени t, т.е. если измерить давление до раскрытия челюстей РП1 и после Рпо, то аналогичным образом можно определить массу или силу тяжести груза.
Двухпозиционный распределитель 14 позволяет соединить нагруженную полость гидроцилиндра 7 с датчиком давления 15. При этом оператор вручную перед выполнением погрузочно-разгрузочных работ переключает блок управления 16 в требуемое для измерения положение. Например, при работе погрузочного манипулятора, показанного на фиг. 1, осуществляется погрузка древесных отходов в лесу с поверхности земли 9 в кузов 10 трактора 1. В этом случае подъем груза осуществляется в области П, а нагруженной является штоковая полость гидроцилиндра рукояти 7. Если манипулятор предназначен для работы только в таком цикле, то нет необходимости устанавливать распределитель 14. Если же погрузка и выгрузка осуществляется только в области 1, что известно как правило заранее, то блок управления 16 переключается таким образом, чтобы распределитель 14 соединил поршневую полость гидроцилиндра 7 с датчиком 15.
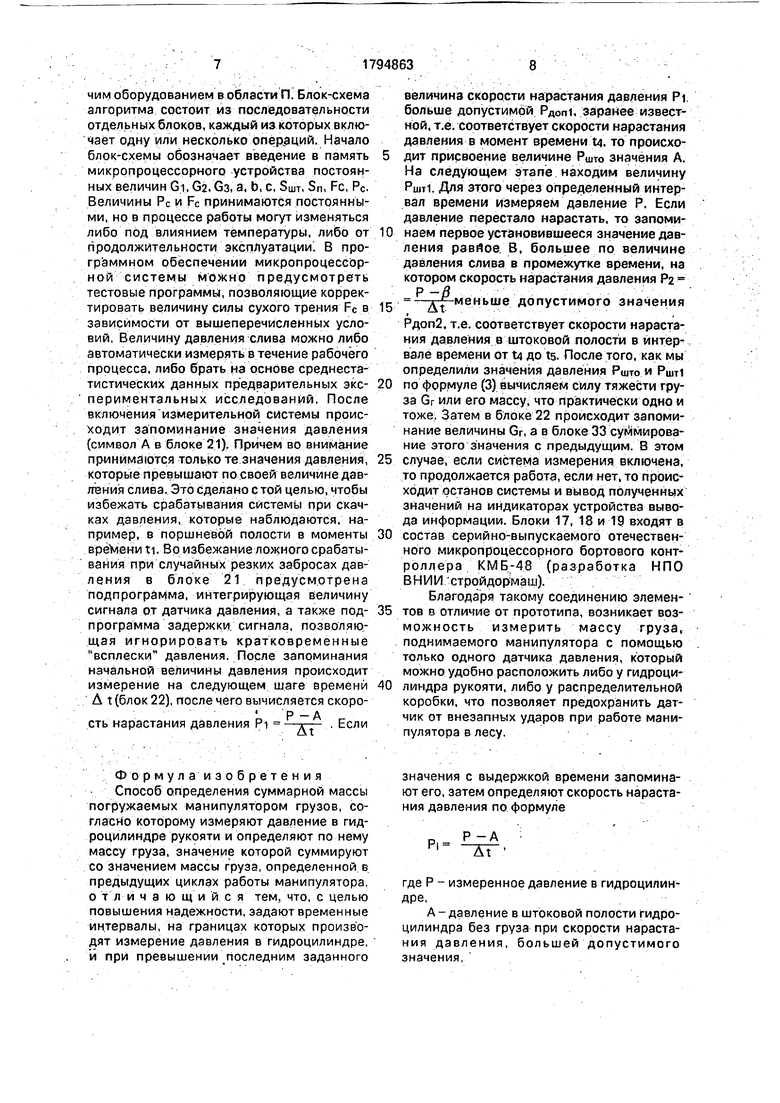
В качестве примера рассмотрим определение массы груза при его подъеме рабочим оборудованием в области Г. Блок-схема алгоритма состоит из последовательности отдельных блоков, каждый из которых включает одну или несколько операций. Начало блок-схемы обозначает введение в память микропроцессорного устройства постоянных величин G.i. Ga, Сз, а, Ь, с, 8шт, Sn, Fc, PC. Величины Ре и Fc принимаются постоянными, но в процессе работы могут изменяться либо под влиянием температуры, либо от продолжительности эксплуатации. В программном обеспечении микропроцессорной системы можно предусмотреть тестовые программы, позволяющие корректировать величину силы сухого трения Fc в зависимости от вышеперечисленных условий, Величину давления слива можно либо автоматически измерять в течение рабочего процесса, либо брать на основе среднестатистических данных предварительных экс- периментальных исследований. После включения измерительной системы происходит запоминание значения давления (символ А в блоке 21). Причем во внимание принимаются только те значения давления, которые превышают по своей величине дав- лтэния слива. Это сделано с той целью, чтобы избежать срабатывания системы при скачках давления, которые наблюдаются, например, в поршневой полости в моменты времени ti. Во избежание ложного срабатывания при случайных резких забросах давления в блоке 21 предусмотрена подпрограмма, интегрирующая величину сигнала от датчика давления, а также под- программа задержки сигнала, позволяющая игнорировать кратковременные всплески давления. После запоминания начальной величины давления происходит измерение на следующем шаге бремени At (блок 22), после чего вычисляется скоро1 Р - А сть нарастания давления Pi -т-
Если
величина скорости нарастания давления Pi. больше допустимой РДОп1, заранее известной, т.е. соответствует скорости нарастания давления в момент времени .ц, то происходит присвоение величине РШто значения А. На следующем этапе находим величину Ршт1. Для этого через определенный интервал времени измеряем давление Р. Если давление перестало нарастать, то запоминаем первое установившееся значение давления равное В, большее по величине давления слива в промежутке времени, на котором скорость нарастания давления PZ
р -в - : . : - ..- :- ; д| меньше допустимого значения
Рдоп2, т.е. соответствует скорости нарастания давления в штоковой полости в йнтер вале времени от t4 до ts. После того, как мы определили значения давления РШто и Ршт1 по формуле (3) вычисляем силу тяжести груза Gr или его массу, что практически одно и тоже. Затем в блоке 22 происходит запоминание величины Gr, а в блоке 33 суммирование этого значения с предыдущим. В этом случае, если система измерения включена, то продолжается работа, если нет, то происходит останов системы и вывод полученных значений на индикаторах устройства вывода информации. Блоки 17, 18 и 19 входят в состав серийно-выпускаемого отечественного микропроцессорного бортового контроллера КМБ-48 (разработка НПО ВНИИ стройдормаш).
Благодаря такому соединению элементов в отличие от прототипа, возникает возможность измерить массу груза, поднимаемого манипулятора с помощью только одного датчика давления, который можно удобно расположить либо у гидроцилиндра рукояти, либо у распределительной коробки, что позволяет предохранить датчик от внезапных ударов при работе манипулятора в лесу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема | 1987 |
|
SU1513247A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ДИАГНОСТИРОВАНИЯ ГИДРОЦИЛИНДРОВ | 2011 |
|
RU2479756C1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
| Гидропривод грузоподъемного механизма лесного манипулятора | 2022 |
|
RU2789167C1 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА СТРЕЛЫ МАНИПУЛЯТОРА | 2017 |
|
RU2652596C1 |
| Гидравлический кран-манипулятор | 1983 |
|
SU1147677A2 |
| Грузоподъемное устройство | 1986 |
|
SU1439068A1 |
| Поворотное устройство манипулятора | 1990 |
|
SU1740307A1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2023 |
|
RU2810823C1 |
Использование: для определения суммарной массы. Сущность изобретения: суммарную массу определяют задавая временные интервалы, определяя в интервалах давление в гидроцилиндре и определяя затем скорость нарастания давления. 3 ил.
Формулаизобретения Способ определения суммарной массы погружаемых манипулятором грузов, согласно которому измеряют давление в гидроцилиндре рукояти и определяют по нему массу груза, значение которой суммируют со значением массы груза, определенной в. предыдущих циклах работы манипулятора, о т л и ч а ю щ и и с я тем, что, с целью повышения надежности, задают временные интервалы, на границах которых производят измерение давления в гидроцилиндре, и при превышении последним заданного
значения с выдержкой времени запоминают его, затем определяют скорость нарастания давления по формуле
Pi
где Р - измеренное давление в гидроцилиндре,
А - давление в штоковой полости гидроцилиндра без груза при скорости нарастания давления, большей допустимого значения,
At- интервал между измерениями давления;
и при превышении последней заданного значения определяют установившуюся амплитуду давления, а суммарную массу груза определяют по формуле
f О РШТ - Р ШТО:
U d Ршт -А
где РШТО - давление в штркрвой Ьолости гидроцилйндра без груза:
d - расстояние между точками подвеса рукояти и ее грузозахватного органа;
а - конструктивная постоянная манипулятора;
Ршт - давление в штоковой полости гид- роцилиндра при подъеме груза.
штокобсгл /
Рс
ПЫЛ
о
Ъ з Ъ % е Ь s
ч -s перенос ёру-з&
поведение
nOpUJHe§G& nQAQCttb
t
min
0 ь ь ъ
ис,2
АОСГГ Ь
% е Ь
ч -s перенос ёру-з&
«5т . , ,
| Строительные и дорожные машины, 1987,ШО,с,10. |
