Изобретение относится к цифровым следящим системам с бесконтактными двигателями постоянного тока и может быть использовано для повышения точности и исключения перерегулирований, что особенно важно при их работе в качестве исполнительных следящих систем, например в ма- нипуляционных роботах.
Цель изобретения - повышение точности и качества управления.
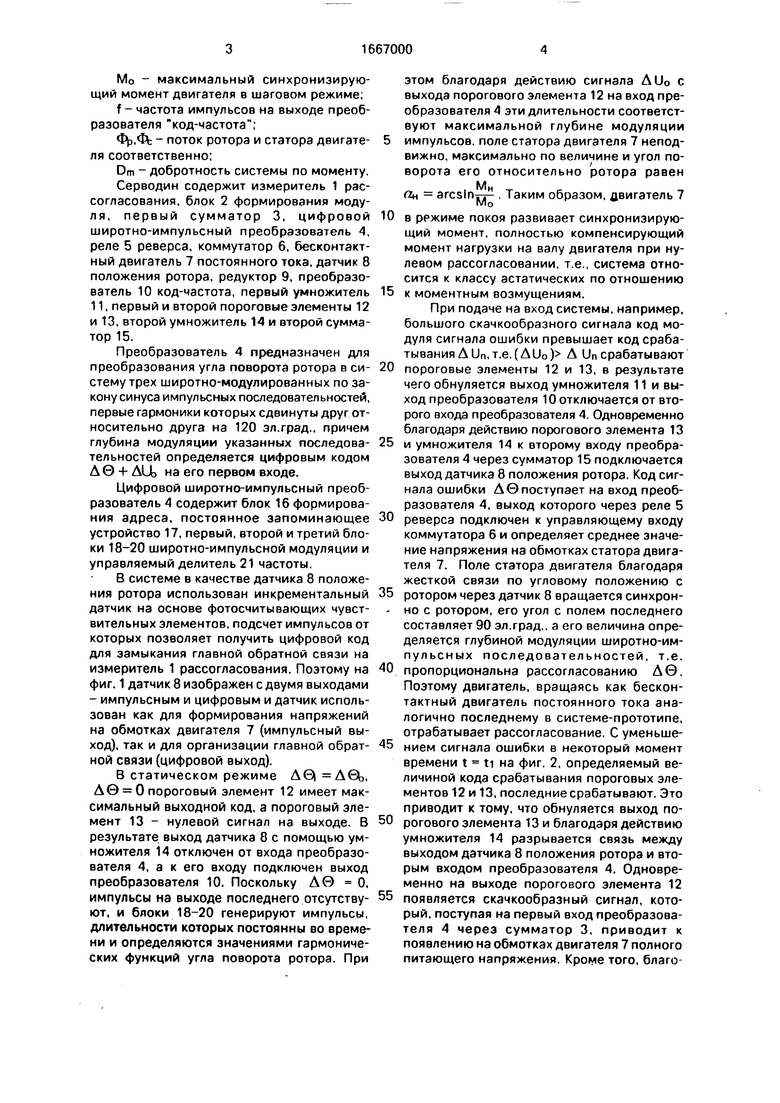
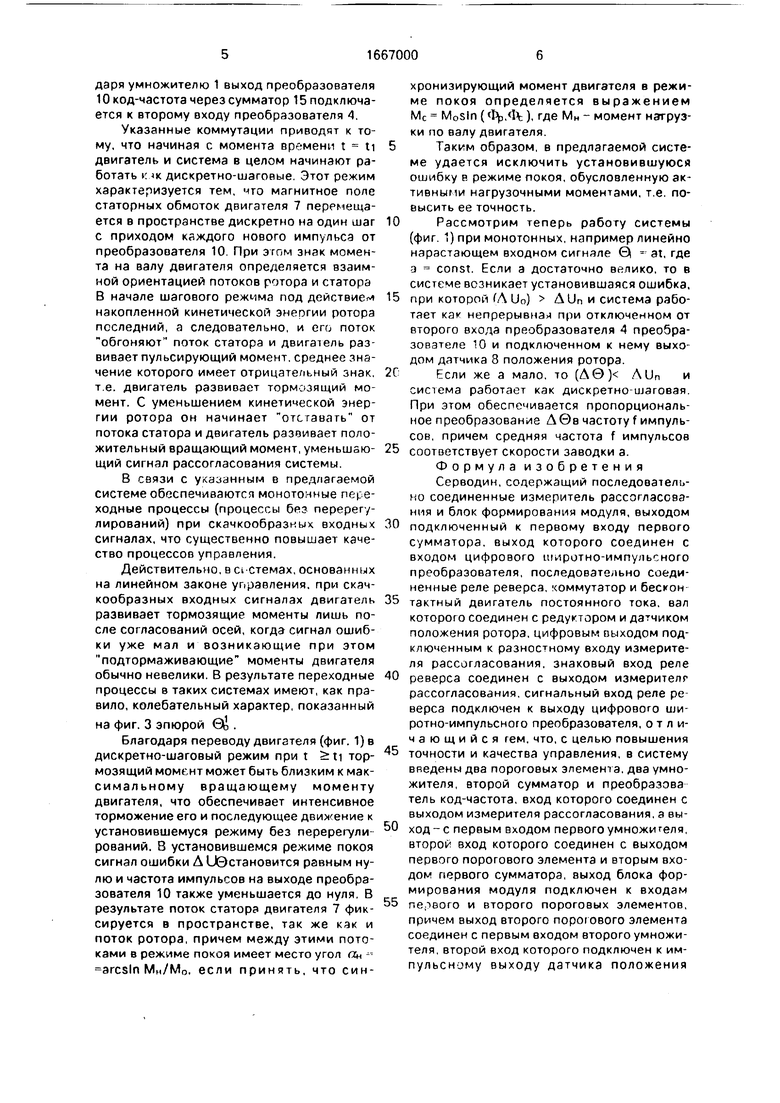
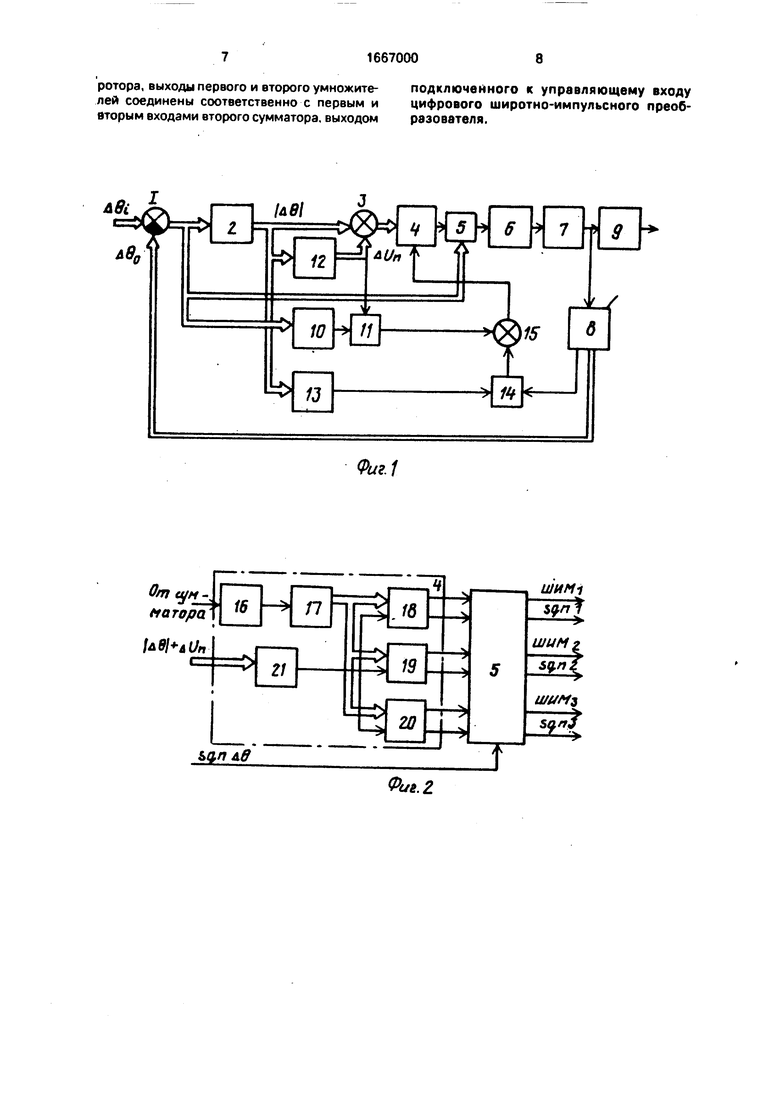
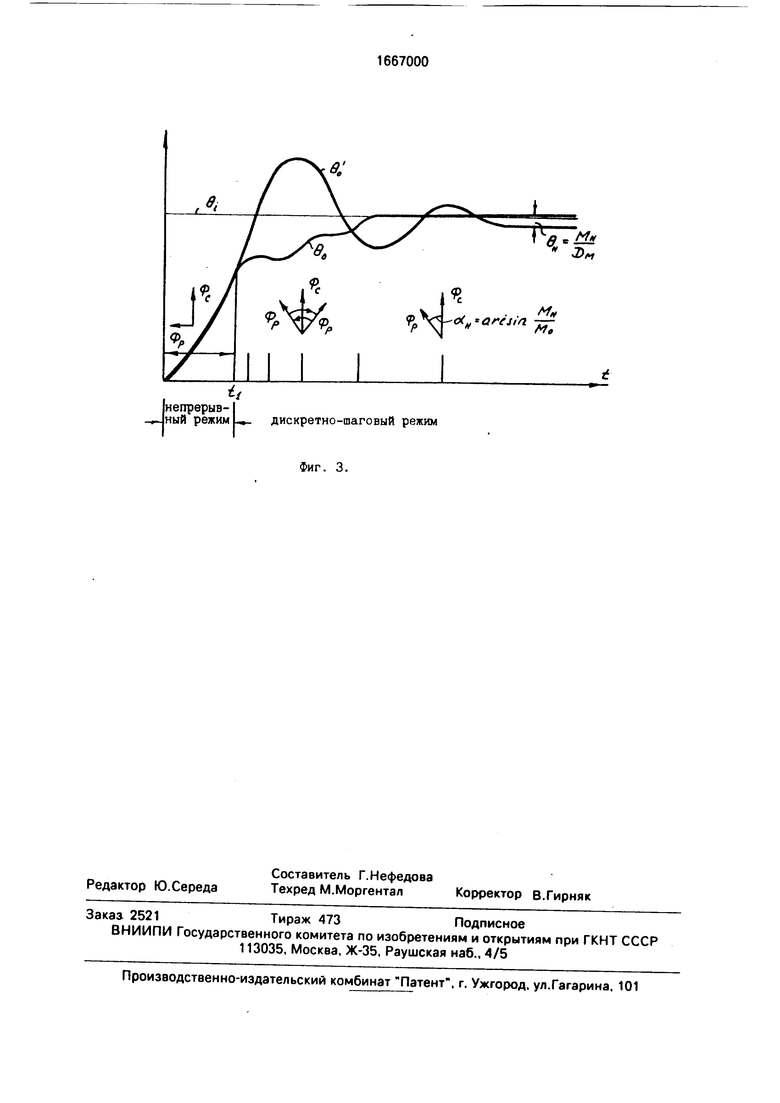
На фиг. 1 представлена блок-схема предлагаемого серводина; на фиг. 2 - пример реализации цифрового широтно-импульсного преобразователя; на фиг. 3 - эпюры основных координат предлагаемой
системы и системы-прототипа при обработке скачкообразного входного сигнала.
На чертежах приняты следующие обозначения:
©,,6Ь,0.,АЭо.иД0 - входной, выходной углы и ошибка следящей системы и их цифровые коды соответственно;
(А0) - код модуля сигнала ошибки;
A Un - коды срабатывания пороговых элементов;
Л Uo - код сигнала на выходе первого порогового элемента;
Мн момент нагрузки на валу двигателя;
О
О
VI о
8
Mo - максимальный синхронизирующий момент двигателя в шаговом режиме;
f- частота импульсов на выходе преобразователя код-частота ;
Фр.Зь - поток ротора и статора двигателя соответственно;
Dm - добротность системы по моменту.
Серводин содержит измеритель 1 рассогласования, блок 2 формирования модуля, первый сумматор 3, цифровой широтно-импульсный преобразователь 4, реле 5 реверса, коммутатор 6. бесконтактный двигатель 7 постоянного тока, датчик 8 положения ротора, редуктор 9, преобразователь 10 код-частота, первый умножитель 11, первый и второй пороговые элементы 12 и 13, второй умножитель 14 и второй сумматор 15.
Преобразователь 4 предназначен для преобразования угла поворота ротора в систему трех широтно-модулированных по закону синуса импульсных последовательностей, первые гармоники которых сдвинуты друг относительно друга на 120 эл.град., причем глубина модуляции указанных последовательностей определяется цифровым кодом Д 0 + ДЦ на его первом входе.
Цифровой широтно-импульсный преобразователь 4 содержит блок 16 формирования адреса, постоянное запоминающее устройство 17, первый, второй и третий блоки 18-20 широтно-импульсной модуляции и управляемый делитель 21 частоты.
В системе в качестве датчика 8 положения ротора использован инкрементальный датчик на основе фотосчитывающих чувствительных элементов, подсчет импульсов от которых позволяет получить цифровой код для замыкания главной обратной связи на измеритель 1 рассогласования. Поэтому на фиг. 1 датчик 8 изображен с двумя выходами - импульсным и цифровым и датчик использован как для формирования напряжений на обмотках двигателя 7 (импульсный выход), так и для организации главной обратной связи (цифровой выход).
В статическом режиме Д0 0 пороговый элемент 12 имеет максимальный выходной код, а пороговый элемент 13 - нулевой сигнал на выходе. В результате выход датчика 8 с помощью умножителя 14 отключен от входа преобразователя 4, а к его входу подключен выход преобразователя 10. Поскольку Д0 О, импульсы на выходе последнего отсутствуют, и блоки 18-20 генерируют импульсы, длительности которых постоянны во времени и определяются значениями гармонических функций угла поворота ротора. При
0
5
0
5
0
5
0
5
0
5
этом благодаря действию сигнала Д1)0 с выхода порогового элемента 12 на вход преобразователя 4 эти длительности соответствуют максимальной глубине модуляции импульсов, поле статора двигателя 7 неподвижно, максимально по величине и угол поворота его относительно ротора равен
Мн «н arcslrbrj- . Таким образом, двигатель 7
Мо
в режиме покоя развивает синхронизирующий момент, полностью компенсирующий момент нагрузки на валу двигателя при нулевом рассогласовании, т.е., система относится к классу астатических по отношению к моментным возмущениям.
При подаче на вход системы, например, большого скачкообразного сигнала код модуля сигнала ошибки превышает код срабатывания Д Un, т.е. (Ди0) Д Un срабатывают пороговые элементы 12 и 13, в результате чего обнуляется выход умножителя 11 и выход преобразователя 10 отключается от второго входа преобразователя 4. Одновременно благодаря действию порогового элемента 13 и умножителя 14 к второму входу преобразователя 4 через сумматор 15 подключается выход датчика 8 положения ротора. Код сигнала ошибки Д0 поступает на вход преобразователя 4, выход которого через реле 5 реверса подключен к управляющему входу коммутатора 6 и определяет среднее значение напряжения на обмотках статора двигателя 7. Поле статора двигателя благодаря жесткой связи по угловому положению с ротором через датчик 8 вращается синхронно с ротором, его угол с полем последнего составляет 90 эл.град.. а его величина определяется глубиной модуляции широтно-им- пульсных последовательностей, т.е. пропорциональна рассогласованию Д0. Поэтому двигатель, вращаясь как бесконтактный двигатель постоянного тока аналогично последнему в системе-прототипе, отрабатывает рассогласование. С уменьшением сигнала ошибки в некоторый момент времени t ti на фиг. 2, определяемый величиной кода срабатывания пороговых элементов 12 и 13, последние срабатывают. Это приводит к тому, что обнуляется выход порогового элемента 13 и благодаря действию умножителя 14 разрывается связь между выходом датчика 8 положения ротора и вторым входом преобразователя 4. Одновременно на выходе порогового элемента 12 появляется скачкообразный сигнал, который, поступая на первый вход преобразователя 4 через сумматор 3, приводит к появлению на обмотках двигателя 7 полного питающего напряжения. Кроме того, благодаря умножителю 1 выход преобразователя 10 код-частота через сумматор 15 подключается к второму входу преобразователя 4.
Указанные коммутации приводят к тому, что начиная с момента времени t ц двигатель и система в целом начинают работать У. к дискретно-шаговые. Этот режим характеризуется тем, что магнитное поле статорных обмоток двигателя 7 перемещается в пространстве дискретно на один шаг с приходом каждого нового импульса от преобразователя 10. При эгом знак момента на валу двигателя определяется взаимной ориентацией потоков ротора и статора В начале шагового режима под действием накопленной кинетической энепгии ротора последний, а следовательно, и его поток обгоняют поток статора и двигатель развивает пульсирующий момент, среднее значение которого имеет отрицательный знак, т.е. двигатель развивает тормозящий момент. С уменьшением кинетической энергии ротора он начинает отставать от потока статора и двигатель развивает положительный вращающий момент, уменьшающий сигнал рассогласования системы.
В связи с указанным в предлагаемой системе обеспечиваются монотонные переходные процессы (процессы без перерегулирований) при скачкообразных входных сигналах, что существенно повышает качество процессов управления.
Действительно, в системах,основанных на линейном законе управления, при скачкообразных входных сигналах двигатель развивает тормозящие моменты лишь после согласований осей, когда сигнал ошибки уже мал и возникающие при этом подтормаживающие моменты двигателя обычно невелики. В результате переходные процессы в таких системах имеют, как правило, колебательный характер, показанный
л
на фиг. 3 эпюрой ©о .
Благодаря переводу двигателя (фиг. 1) в дискретно-шаговый режим при t ti тормозящий момент может быть близким к мак- симальному вращающему моменту двигателя, что обеспечивает интенсивное торможение его и последующее движение к установившемуся режиму без перерегули рований. В установившемся режиме покоя сигнал ошибки Д ЦЭстановится равным нулю и частота импульсов на выходе преобразователя 10 также уменьшается до нуля. В результате поток статора двигателя 7 фиксируется в пространстве, так же как и поток ротора, причем между этими потоками в режиме покоя имеет место угол Он --- arcsln Ми/Mo, если принять, что синхронизирующий момент двигателя в режиме покоя определяется выражением Мс MoSin (fyj,lv), где Мн - момент нагрузки по валу двигателя.
Таким образом, в предлагаемой системе удается исключить установившуюся ошибку в режиме покоя, обусловленную активными нагрузочными моментами, т.е. повысить ее точность.
Рассмотрим теперь работу системы
(фиг. 1) при монотонных, например линейно нарастающем входном сигнале 01 at, где а const. Если а достаточно велико, то в системе возникает установившаяся ошибка,
при которой (Л Uo) Дип и система работает как непрерывная при отключенном от второго входа преобразователя 4 преобразователе 10 и подключенном к нему выходом датчика 8 положения ротора.
Если же а мало, то (Л0) Лип и
система работает как дискретно-шаговая. При этом обеспечивается пропорциональное преобразование Л0в частоту f импульсов, причем средняя частота f импульсов
соответствует скорости заводки а. Формула изобретения Серводин, содержащий последовательно соединенные измеритель рассогласования и блок формирования модуля, выходом
подключенный к первому входу первого сумматора, выход которого соединен с входом цифрового широтно-импульсного преобразователя, последовательно соединенные реле реверса, коммутатор и бескон
тактный двигатель постоянного тока, вал которого соединен с редуктором и датчиком положения ротора, цифровым выходом подключенным к разностному входу измерителя рассогласования, знаковый вход реле
реверса соединен с выходом измерителг рассогласования, сигнальный вход реле реверса подключен к выходу цифрового ши- ротно-импульсного преобразователя, отличающийся гем. что, с целью повышения
точности и качества управления, в систему введены два пороговых элемента, два умножителя, второй сумматор и преобразова тель код-частота, вход которого соединен с выходом измерителя рассогласования, а выход-с первым входом первого умножителя, второй вход которого соединен с выходом первого порогового элемента и вторым входом первого сумматора, выход блока формирования модуля подключен к входам
первого и второго пороговых элементов, причем выход второго порогового элемента соединен с первым входом второго умножителя, второй вход которого подключен к импульсному выходу датчика положения
ротора, выходы первого и второго умножите- подключенного к управляющему входу лей соединены соответственно с первым и цифрового широтно-импульсного преоб- вторым входами второго сумматора, выходом разователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Следящая система | 1975 |
|
SU545969A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
Изобретение относится к цифровым следящим системам с бесконтактными двигателями постоянного тока (БДПТ) и позволяет повысить их точность и качество управления. Это достигается тем, что с помощью логического устройства управления изменяют режим работы БДПТ с непрерывного (при больших сигналах рассогласования) на дискретно-шаговый (при малых рассогласованиях). Для этого при величине модуля сигнала рассогласования, меньшей некоторого порогового значения, с помощью пороговых элементов и умножителей отключают импульсный выход датчика положения ротора БДПТ от второго входа цифрового широтно-импульсного преобразователя (ЦШИП), а вместо него на этот вход подключают выход преобразователя код-частота, и одновременно с помощью порогового элемента и сумматора на первый вход ЦШИП подают максимальный управляющий сигнал. 3 ил.
A0t
. I
Фиг.1
Фиг. 2
if
(непрерыв-1 ный режим L- дискретно-шаговый режим
Фиг. 3.
м
$M-«V
. . м
QftJifl -ГГ- Мв
| Михалев А.С. | |||
| Миловзоров В.П | |||
| Следящие системы с бесконтактными двигателями постоянного тока | |||
| М.: Энергия, 1979 | |||
| Матюхина Л.И., Михалев А.С., Сидорук С.Н | |||
| и Чушенков И.М | |||
| Исполнительный модуль промышленного робота на основе бесконтактного двигателя постоянного тока | |||
| - Сб | |||
| статей Электронная техника в автоматике, под ред | |||
| Ю.И.Конева, вып | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| М.: Јадио и связь, 1985, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
