1(54) СЛЕДЯЩАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1988 |
|
SU1571547A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1457164A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1144132A1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1104566A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| Устройство для контроля времени работы оборудования | 1990 |
|
SU1815664A1 |
Изобретение относится к автоматике и может найти применение в системах автоматического и дистанционного управления, в станках с программным управлением, в роботах-манипуляторах и т.д.
Известна следящая система, содержащая сельсин-задатчик, сельсин-приемник, включенные в трансформаторном режиме, электронный усилитель, электромашинный усилитель, исполнительный двигатель, редуктор, причем ротор сельсина оси отработки является источником напряжения, подаваемого на вход злектронного усилителя. Исполнительный двигатель такой следящей систеуи останавливается только тогда-, когда напряжение на входе электронного усилителя обратится в нуль, т.е. когда ротор сельсина оси отработки устанавливается в положение, перпендикулярное направлению поля статора, и которое называется согласованным Cl 3- Недостатком известной системы является невозможность оперативного изменения коэффициента передачи и вследствие этого, ограниченность функциональных возможностей и области применения.
Наиболее близкой к изобретению по технической сущности является следящая система, содержащая последовательно соединенные задающий генератор, первый блок питания, сельсин-задатчик, первый формирователь импульсов, селектор импульсов рассогласова- ния, генератор линейно меняющегося напряжения, пиковый детектор, усилитель мощности, коммутатор и исполнительный механизм, вал которого соединей с объектом управления и ротором сельсина-приемника,вход которого через второй блок питания соединен с выходом задающего генератора, а вход через второй формирователь импульсов соединен с вторыми входами селектора импульсов рассогласования и триггера знака рассогласования, первый вход которого подключен к выходу первого формирователя импульсов, а выход к управляющему входу коммутатора 2 J.
Недостатком известной системы является узкая область ее применения.
Цель изобретения - расширение области применения системы.
Поставленная цель достигается тем, что в следящей системе, содержащей задающий генератор, последовательно соединенные первый блок питания,сельсин-; адатчик, первый формирователь импульсов, последовательно соединенные второй блок питания, сельсин-приемник и второй формирователь импульсов, последовательно соединенные се-лектор импульсов рассогласования,генератор линейно меняющегося напряжения, пиковый детектор, усилитель мощности, коммутатор и исполнительный механизм, Baj которого соединен с объектом упр 1вления и ротором сельсина -приемника, и триггер знака рассог;1асования, подключенный выходом к управляющему входу коммутатора, дополнительно установлены четыре делителя частоты, четыре мультиплексора, блок управления мультиплексорами, пульт оператора и блок датчиков контроля, причем выход задающего генератора через последовател5)Но соединенные первые делитель частоты и мульти плексор соединен с входом первого блока питания, а через последовательно соединенные вторые делитель час,тоты и мультиплексор - с входом второго блока питания, выход первого формирователя импульсов через последовательно соединенные третьи делитель частоты и мультиплексор соединен с первыми входами селектора импульсов рассогласования и триггера знака рассогласования, выход второго формирователя импульсов через последовательно соединенные четвертые делитель частоты и мультиплексор соединен с вторыми входами селектора импульсов рассогласования и триггера знака рассогласования, входы блока датчиков контроля соединены с выходами объекта управления, а выходы - с соответствуюищми входами блока управления мультиплексорами, .остальные входы которого подключены к выходам пульта оператора, а выходы - к управляющим входам мультиплексоров.
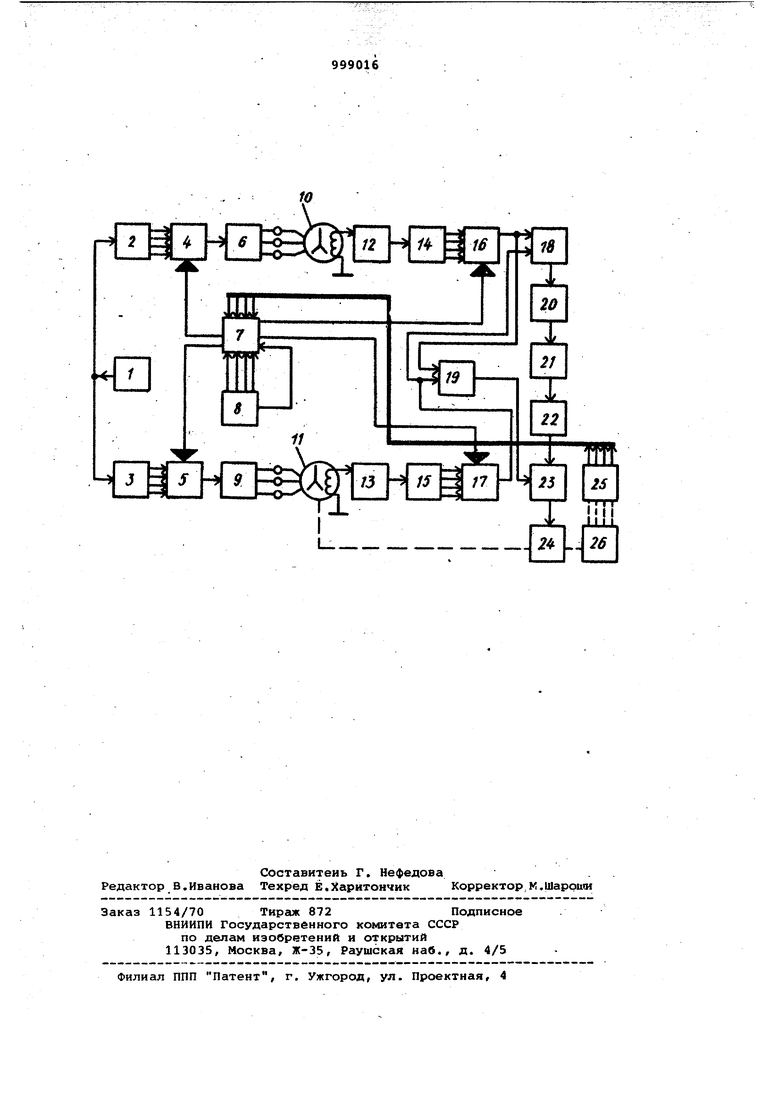
На чертеже представлена блок-схема системы.
Следящая система содержит задгиощиП генерагор 1, первый и второй делители частоты 2 и 3, первый и второй мультиплексоры 4 и 5, первый блок питания 6, блок управления 7, пульт оператора 8, второй блок питания 9, сельсин-задатчик 10, сельсинnpHeN.HHK 11, первый и второй формирователи импульсов 12 и 13, третий и четвертый делители частоты 14 и 15, третий И четьартый ультиплаксоры 16 и 17, селектор импульсов рассогласования 18, триггер, знака рассогласования 19, генератор линейно меняющегося напряжения 20, пиковый детектор 21, усилитель мощности 22, коммутатор 23, исполнительный механизм 24, елок датчиков контроля 25, объект управления 26,
Система работает следующим образом.
Блоки питания б и 9 статоров сельсинов 10 и 11 преобразуют импульсы, поступающие от задаюше;о генератора 1 через делители частоты 2 и 3 и мультиплексоры 4 и 5 в трехфазные симметричные напряжения небольшой амплитуды (2,5-5 в), питающие обмотки синхронизации (статоров) сельсинов 10 и 11, соответственно. При таком способе питания для напряжений,вырабатываемых на обмотках роторов сельсинов, при числе пар полюсов с достаточно высокой точностью
I d
справедливо соотношение ГД® .
d - изменение фазы выходного напряжния1 dot- изменение угловых координа роторов сельсинов.
Изменение фазы выходных сигналов сельсинов равно изменению угловых координат роторов.
Выходные напряжения сельсинов 10 и 11 преобразуются формирователями импульсов 12 и 13 в прямоугольные импульсы и через делители частоты 14 и 15, мультиплексоры 16 и 17 поступают на вход селектора импульсов рассогласования 18.
Необходимым условием работы системы является равенство парных произведений коэффициентов деления частоты делителей 2, 14 и 3, 15, выбираеNsjx в процессе работы системы с помощью мультиплексоров 4, 16-5, 17 по командам, поступающим из блока управления мультиплексорами в зависимости от ситуации, сложившейся на Объекте управления 26, контролиругмо блоком датчиков контроля 25, а та1;:.кЕ устанавливаемых по желанию оператора с помощью пульта оператора 8.При выполнении этого условия, частоты ,сигналов на выходах мультиплексоров 16 и 17 будут равны.
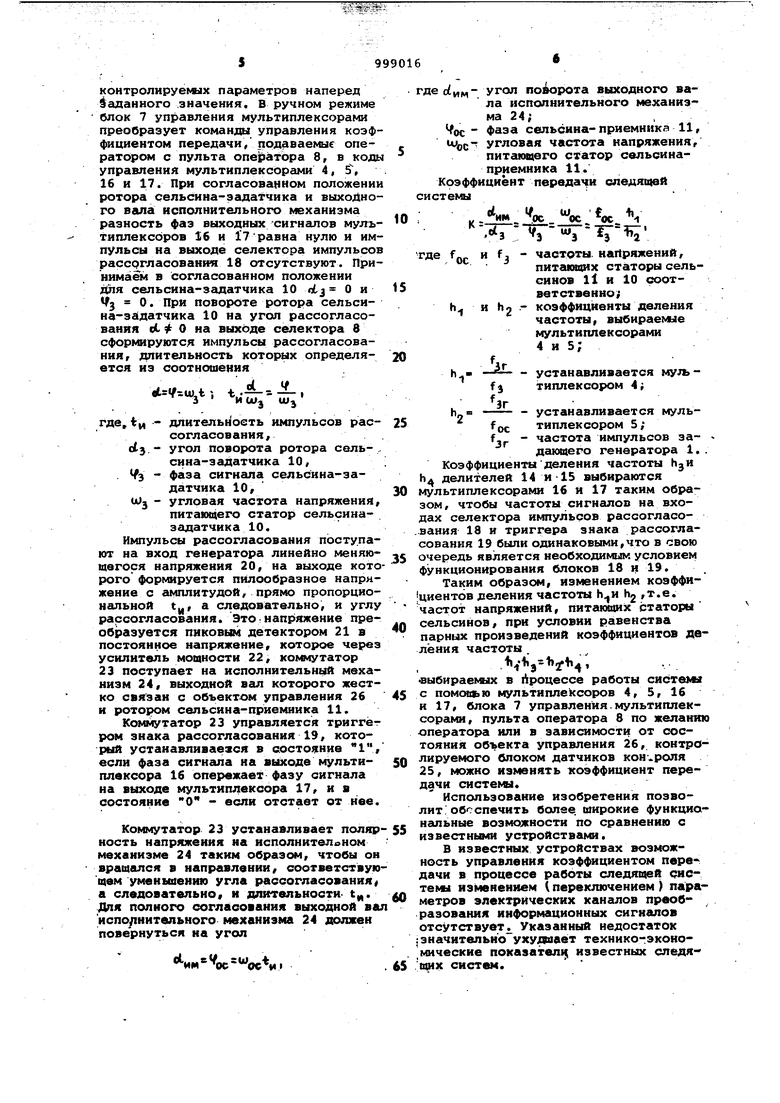
Выбор режима работы блока 7 управления мультиплексорами осуществляется командой Выбор режима, которая подается оператором с пульта оператора 8 и принимает значение,например, логическая 1 при необходимости установить блок 7 управления мультиплексорами в автоматический режим управления коэффициентом передачи системы и логический О - при необходимости ручного управления коэффициентом передачи. В автоматическом режиме блок 7 управления мультиплексорами преобразует сигналы, поступающие из блока датчиков контроля 25 состояний объекта управления 26 в коды управления мультиплексорами 4, 5, 16 и 17. Снгн.алы, поступающие в блок 7 управления мультиплексорами из блока датчиков контроля 25, изменяют его выходные аягналы (лог.1, О) в аависимости от ситуации, сложившейся на объекте управления 26, например, при.достижении одного из контролнруе1«1х параметров наперед Заданного .значения. В ручном режиме блок 7 управления мультиплексорами преобразует команды управления коэффициентом передачи/ род ваемые оператором с пульта опе| атЬра 8, в коды управления мультиплексорами 4, 5, 16 и 17. При согласованном положении ротора сельсина-эадатчика и выхоЛного вгша1 исполнительного механизма разность фаз выходных сигналов мул ьтиплексоров 16 и 17равиа нулю и импульсы на выходе селектора импульсов рассдгласования 18 отсутствуют. Принимав в согласованном положенни для сельсина-задатчика 10 «ij О и Vj 0. При повороте ротора сельсина-за1датчйка 10 на угол рассогласования Ы. О на выходе селектора 8 сформируются импульсы рассогласования, длительность которых определяется из соотношения , t., Л И Шц Ш где, ii/i дпительность импульсов рассогласования, otj,- угол поворота ротора сельсина-задатчика 10, . 3 - фаза сигнала сельсина-задатчика 10, ujj - угловая частота напряжения, питающего статор сельсиназадатчика 10. Импульсы рассогласования поступают на вход генератора линейно меняющегося напряжения 20, на выходе кото рого формируется пилообразное напряжение с амплитудой, прямо пропорциональной иг а следовательно, и углу рассогласования. Это;напряжение преобразуется пиковым детектором 21 в постоянное напряжение, которое через усилитель мощности 22, коммутатор 23 поступает на исполнительнь й механизм 24, выходной вал которого жестко связан с объектом управления 26 и ротором сельсина-приемника 11. Коммутатор 23 управляется триггёт ром знака рассогласования 19, который устанавливаемся в состояние 1, если фаза сигнала на выходе мультиплексора 16 опережает фазу сигнала на выходе мультиплексора 17, и в состояние О - если отстает от нее. Коммутатор 23 устанавливает поляр ность напряжения на исполнителоном механизме 24 таким образом, чтобы он вращался в направлении, соответствую щем уменыцению угла рассогласования а следовательно, и длительности- t,,. Для полного согласования выходной вал исполнительного механизма 24 должен повернуться на угол .
999016 где поворота выходного вала исполнительного механизма 24;, foe фаза сельсина- приемника 11, ос угловая частота напряжения, питсцощего статор сельсинаприемника 11. Коэффициент передачи следящей системы ...J V ос з V, з а - частоты. наЛряжений, где fjjj. и f питгитоих статоры сельсинов 11 и 10 соответственно;2 - коэффициенты деления частоты, выбираемые мультиплексорами 4 и Б; устанавливается мультиплексором 4 i устанавливается мультиплексором S; частота импульсов задающего генератора 1.. Коэффициенты деления частоты h делителей 14 и-15 выбираются мультиплексорами 16 и 17 таким образом, чтобы частоты сигналов на входах селектора импульсов рассогласо.вания 18 и триггера знака рассогласования 19 были одинаковыми, ч то в свою очередь является необходимым условием функционирования блоков 18 и 19. Таким образом, изменением коэффициентов деления частоты h2 ,т.е. частот напряжений, питающих статоры сельсинов, при условии равенства парных произведений коэффициентов деления частоты . выбираемых в процессе работы системы с помооью мультиплексоров 4,5, 16 и 17, блока 7 управления.мультиплексорами, пульта оператора 8 по желанию оператора или в зависимости от состояния объекта управления 26, контролируемого блоком датчиков кон;.роля 25, можно изменять коэффициент передачи системы. Использоваиие изобретения позволит обеспечить более, широкие функциональные возможности по сравнению с известными устройствами. В известиых устройствах возможность управления коэффициентом передачн в процессе работы следящей систеки изменением (переключением ) параметров электрических каналов преобразования информационных сигналов отсутствует. Указанный недостаток значительио ухуяиает техникогэкоиомические показатели; известных следя- щнх систем.
Предложенное техническое обеспечивает возможность изменения коэффициента передачи в широком диапазоне значений простыми техническими средствами - делителями частоты, мультиплексорами, в процессе работы систе1 и Б зависимости от ситуации, сложившейся на объекте управления,или по желанию оператора, и тем сг1мым придает следящей системе ряд ценных технических свойств: во-первых, возможность ступенчатого перехода в процессе работы систеил из режима грубого в режим точного управления объектом и наоборот, во вторых, возможность изменения масштаба передачи перемещений объекту управления, например при работе в режиме поиска или по копиру; в-третьих, возможность управления динамическими свойствами следящей системы в процессе ее раьоты, т.е. расширяет область применения предлагаемой системы.
Формула.изобретения
Следящая система, содержащая задающий генератор, последовательно соединенные первый блок питания, сельсин-задатчик, первый формирователь импульсов, последовательно соединенные второй блок питания, сельсин-приемник и второй формирователь импульсов, последовательно соединенные селектор импульсов рассогласования,генаратор линейно меняющегося напряжения, пиковый детектор, усилитель мощности, коммутатор исполнительный механизм, вал которого соединен с объектом управления и ротором сельсина-приемника, и триггер знака рассогласования, подключенный выходом
к управляющему входу коммутатора, отличающаяся тем, что, с целью расширения области применени системы, в ней установлены четыре делителя частоты, четыре мультиплексора, блок управления мультиплексорами, пульт оператора и блок датчиков контроля, причем выход задающего генератора через последовательно соединенные первые делитель частоты и мультиплексор соединен с входом первого блока питания, а через последовательно соеданенные вторые делитель частоты и мультиплексор - с входом второго блока питания, выход первого форкшрователя импульсов через последовательно соединенные третьи делитель частоты и мультиплексор соединен с первыми входами селектора импульсов рассогласования и триггера знака рассогласования, выход второго формирователя импульсов через последовательно соединенные четвертые делитель частоты и мультиплексор соединен с вторыми входами селектора импульсов рассогласования и триггера знака рассогласования, входы блока датчиков контроля соединены с выходами объекта управления, а выходы - с соответствующими входами блока управления мультиплексорами, остальные входи которого подключены к выходам пульта оператора, д выходы к управляющим входам мультиплексоров.
Источники информации, , принятые во внимание при экспертизе
