Изобретение относится к фотограмметрии.
Цель изобретения - повышение точности определения координат точек фотоснимков.
Способ иллюстрируется чертежами (фи г. 1-6).
Все описанные выше движения глаз схематично иллюстрирует фиг.1.
Проводимые исследования показывают, что именно информация о микросакка- дах во время текущей фиксации глаз позволяет зрительному анализатору оценивать высоты точек стереомодели, отсюда их основное свойство - выставленное осей визирования глаз по направлениям на одноименные точки фотоснимков стереопары.
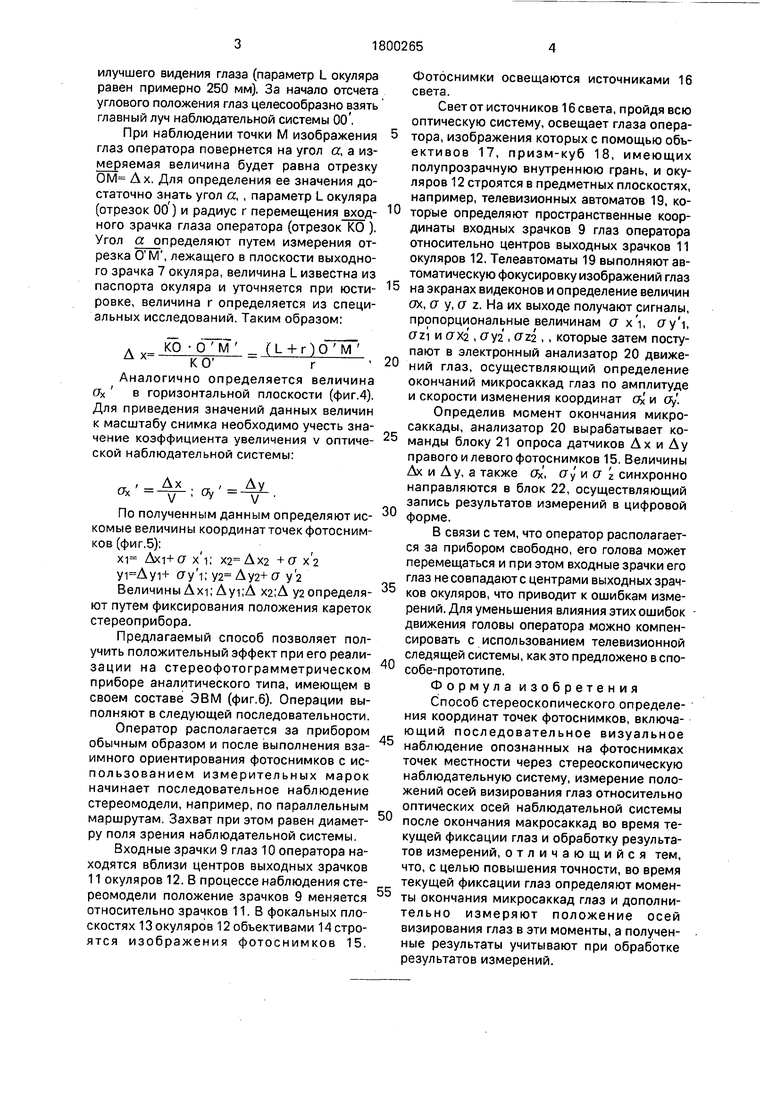
В условиях стереоскопического наблюдения стереомодели глаза оператора совершают синхронные скачки (макросаккады), после окончания которых наступает период текущей фиксации глаз, во время которой определенный момент времени ta соответствует окончанию очередной микросаккады.
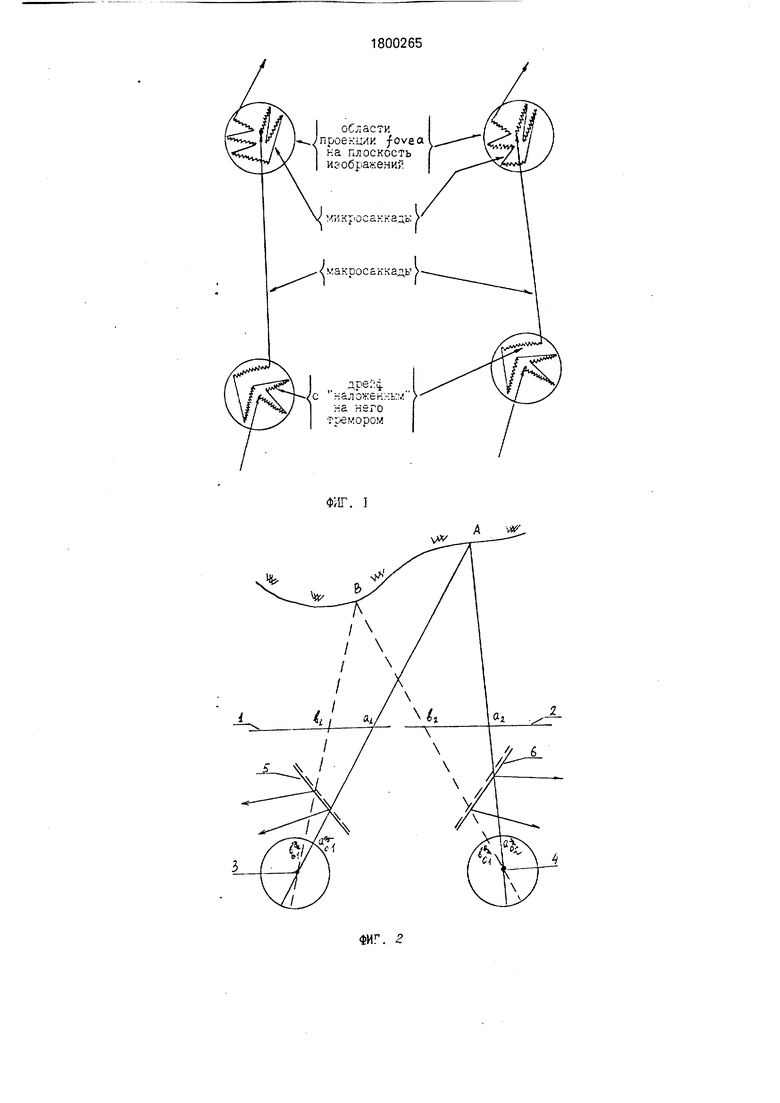
Оси визирования глаз оператора проходят в этом случае через точки ai и a z фотоснимков 1 и 2 и пересекаются в точке А стереомодели(фиг.2). В момент te окончания следующей микросаккады глаза оператора повернутся на некоторые углы вокруг центров их вращения 3 и 4, центры зрачков переместятся из точек aoi и ао2 в точки оси и Ьо2, а оси визирования глаз, пройдя через точки bi и D2 фотоснимков 1 и 2 соответственно пересекутся в точке В стереомодели. Фотоснимки 1 и 2 расположены на каретках обычного стереоприбора, перемещаемых в плоскости фотоснимков по двум взаимно перпендикулярным направлениям. Угловое положение осей визирования глаз оператора определяют путем измерения центров зрачков в какой-либо системе координат. С этой целью изображение глаз оператора выводят из наблюдательных ветвей с помощью частично серебренных зеркал 5 и 6. При использовании наблюдательной системы глаза оператора помещают так, чтобы центры входных зрачков размещались в центрах 0 выходных зрачков 7 окуляров (фиг.З). Наблюдаемое изображение располагается в плоскости 8, удаленной от центра выходного зрачка окуляра на расстояние наел
С
00
о о ю о
СП
илучшего видения глаза (параметр L окуляра равен примерно 250 мм). За начало отсчета углового положения глаз целесообразно взять главный луч наблюдательной системы 00.
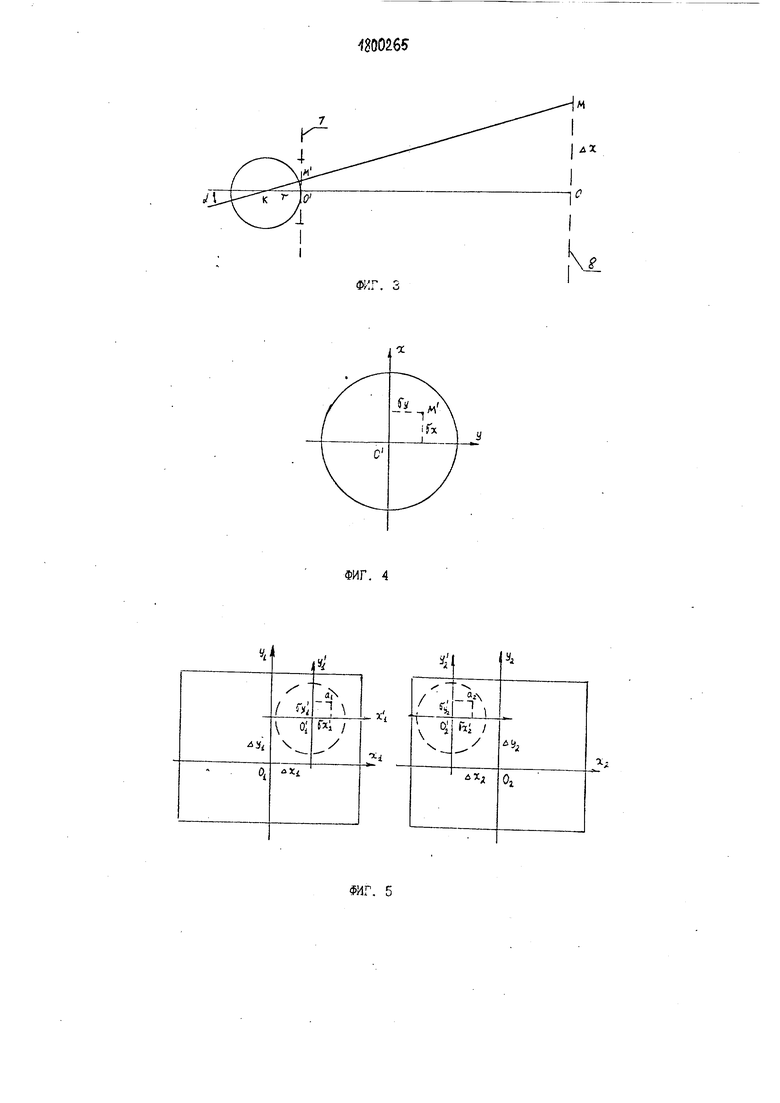
При наблюдении точки М изображения глаз оператора повернется на угол а, а измеряемая величина будет равна отрезку ОМ Ах. Для определения ее значения достаточно знать угол а, , параметр L окуляра (отрезок 00) и радиус г перемещения вход- ного зрачка глаза оператора (отрезок КО ). Угол а определяют путем измерения отрезка О М , лежащего в плоскости выходного зрачка 7 окуляра, величина L известна из паспорта окуляра и уточняется при юстировке, величина г определяется из специальных исследований. Таким образом:
Ах
КО О М
(L + r)0 M г величина
КО
Аналогично определяется (7Х в горизонтальной плоскости (фиг.4). Для приведения значений данных величин к масштабу снимка необходимо учесть значение коэффициента увеличения v оптической наблюдательной системы:
Ok
Ах
Оу
Ау
V у V
По полученным данным определяют искомые величины координат точек фотоснимков (фиг.5):
xi Axi+CT x i; +сг х а
cry i; ya Ay2+ о у 2
Величины Axi; Ayi;A X2;A y2определяют путем фиксирования положения кареток стереоприбора.
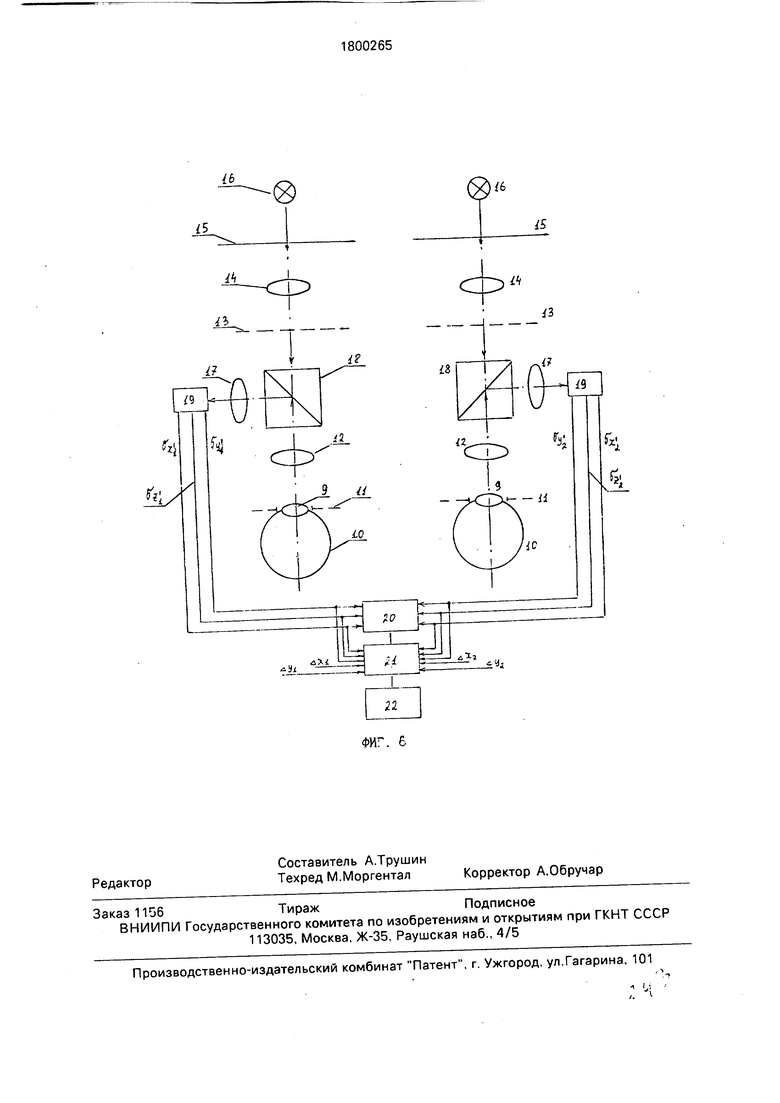
Предлагаемый способ позволяет получить положительный эффект при его реализации на стереофотограмметрическом приборе аналитического типа, имеющем в своем составе ЭВМ (фиг.6). Операции выполняют в следующей последовательности.
Оператор располагается за прибором обычным образом и после выполнения взаимного ориентирования фотоснимков с ис- пользованием измерительных марок начинает последовательное наблюдение стереомодели, например, по параллельным маршрутам. Захват при этом равен диаметру поля зрения наблюдательной системы.
Входные зрачки 9 глаз 10 оператора находятся вблизи центров выходных зрачков 11 окуляров 12. В процессе наблюдения стереомодели положение зрачков 9 меняется относительно зрачков 11. В фокальных плоскостях 13 окуляров 12 объективами 14 строятся изображения фотоснимков 15.
0
5
0
5
0
5
0
5
0
5
Фотоснимки освещаются источниками 16 света.
Свет от источников 16 света, пройдя всю оптическую систему, освещает глаза оператора, изображения которых с помощью объ- ективов 17, призм-куб 18, имеющих полупрозрачную внутреннюю грань, и окуляров 12 строятся в предметных плоскостях, например, телевизионных автоматов 19, которые определяют пространственные координаты входных зрачков 9 глаз оператора относительно центров выходных зрачков 11 окуляров 12. Телеавтоматы 19 выполняют автоматическую фокусировку изображений глаз на экранах видеконов и определение величин ох, о у, а г. На их выходе получают сигналы, пропорциональные величинам о x i, , crzi и СТХ2 , 7у2 , crz2 ,, которые затем поступают в электронный анализатор 20 движений глаз, осуществляющий определение окончаний микросаккад глаз по амплитуде и скорости изменения координат о и Оу.
Определив момент окончания микро- саккады, анализатор 20 вырабатывает команды блоку 21 опроса датчиков Ахи Ау правого и левого фотоснимков 15.Величины Ах и А у, а также Ох, Сту и a z синхронно направляются в блок 22, осуществляющий запись результатов измерений в цифровой форме.
В связи с тем, что оператор располагается за прибором свободно, его голова может перемещаться и при этом входные зрачки его глаз не совпадают с центрами выходных зрачков окуляров, что приводит к ошибкам измерений. Для уменьшения влияния этих ошибок движения головы оператора можно компенсировать с использованием телевизионной следящей системы, как это предложено в способе-прототипе.
Формула изобретения
Способ стереоскопического определения координат точек фотоснимков, включающий последовательное визуальное наблюдение опознанных на фотоснимках точек местности через стереоскопическую наблюдательную систему, измерение положений осей визирования глаз относительно оптических осей наблюдательной системы после окончания макросаккад во время текущей фиксации глаз и обработку результатов измерений, отличающийся тем, что, с целью повышения точности, во время текущей фиксации глаз определяют моменты окончания микросаккад глаз и дополнительно измеряют положение осей визирования глаз в эти моменты, а полученные результаты учитывают при обработке результатов измерений.
ФИГ. 2
22
п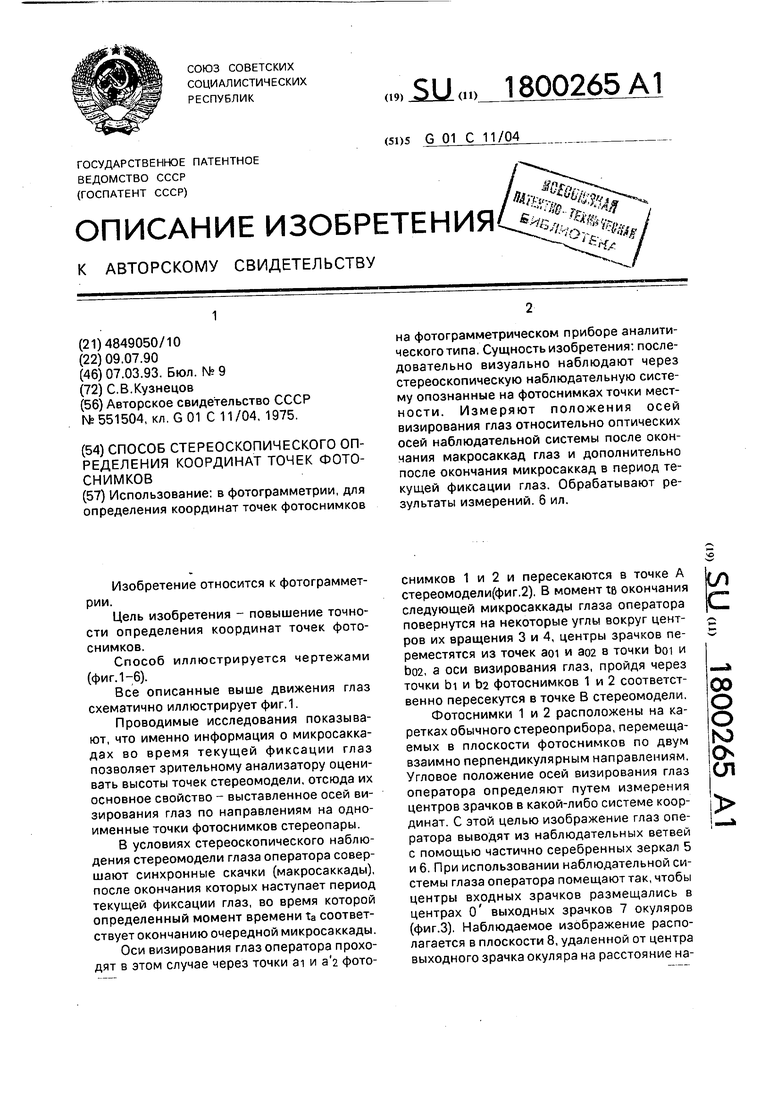
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стереоскопического измерения координат точек фотоснимков | 1975 |
|
SU551504A1 |
| Стереокомпаратор | 1977 |
|
SU678290A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| НАШЛЕМНЫЙ ВИЗИР ПИЛОТА ВЕРТОЛЕТА | 1993 |
|
RU2042968C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Стереокомпаратор | 1961 |
|
SU145014A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| Стереоскопическое измерительное устройство | 1988 |
|
SU1768978A1 |
| Стереокомпаратор | 1974 |
|
SU514192A1 |
Использование: в фотограмметрии, для определения координат точек фотоснимков на фотограмметрическом приборе аналитического типа. Сущность изобретения: последовательно визуально наблюдают через стереоскопическую наблюдательную систему опознанные на фотоснимках точки местности. Измеряют положения осей визирования глаз относительно оптических осей наблюдательной системы после окончания макросаккад глаз и дополнительно после окончания микросаккад в период текущей фиксации глаз. Обрабатывают результаты измерений. 6 ил.
ФИГ. 6
| Способ стереоскопического измерения координат точек фотоснимков | 1975 |
|
SU551504A1 |
