1
Изобретение относится к фотограмметрии.
Известен способ стереоскопического изме рения координат точек фотоснимков, заключающийся в стереоскопическом измерении стереомодели и регистрации результатов измерений.
Недостатком известного способа является малая производительность измерений, обусловленная тем, что для стереоскопичес кого измерения оператор последовательно наводит измерительную марку на выбранны точки путем перемещения кареток снимков или компонентов наблюдательной системы при помощи соответствующих штурвалов.
С целью устранения указанного недостатка в предложенном способе измерение стере ом оде ли вьшолняют путем определения положения осей визирования глаз относительно оптических осей наблюдательной системы, а регистрацию положения осей визирования вьшолняют в моменты текущей фиксации глаз.
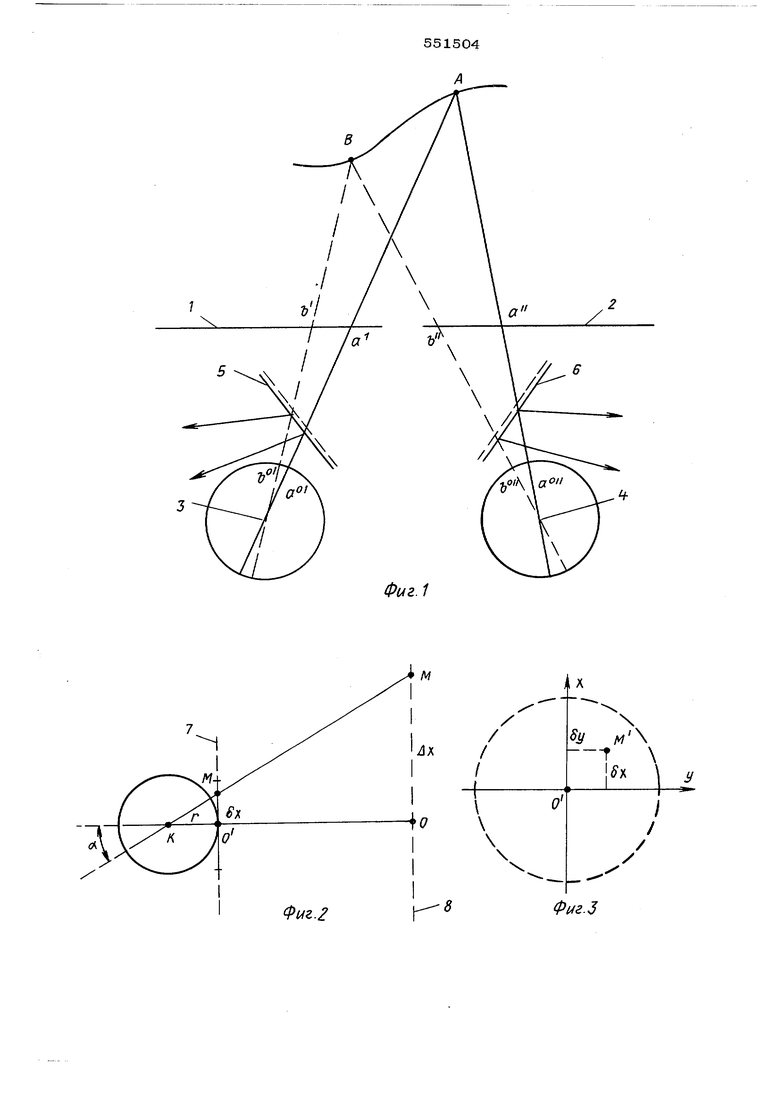
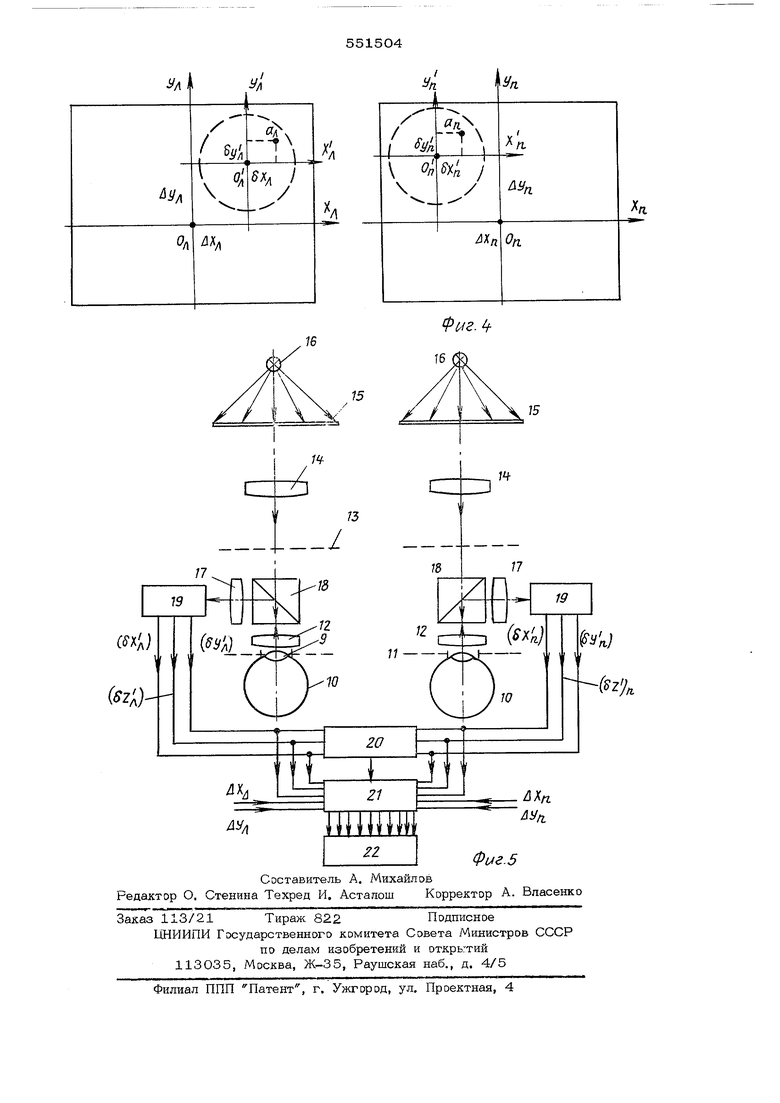
На фиг. 1 изображена схема наблюдения фотоснимков; на фиг. 2 - схема измерения углового положения оси визирования глаза в вертикальной плоскости; на фиг. 3схема измерения величин; на фиг. 4 - система координат; на фиг. 5 - блок-схема прибора для реализации предлагаемого способа.
Возможность измерения координат идентичных точек фотоснимков стереопары предт лагаемым способом обусловлена физиологическими особенностями стереоскопического зрения человека. Известно, что при рассматривании какого-либо прдемета оба глаза человека непрерывно совершают три основных вида синхронных движений; дрожание,, т.е. покачивание с угловой скоростью 20 в сек и амплитудой 10-15 ; мерцание, т.е. вращение с угловой скоростью 600в сек и амплитудой О,3-5,о , дрейфование, т.е. очень медленное покачивание с угловой скоростью IB сек и амплитудой 5,
Кроме того, в процессе стереоскопического наблюдения глаза человека совершают быстрые синхронные конвертирующие движения. В результате всех этих движений на се чатке глаз человека возникают изображения рассматриваемого предмета, смешенны относительно друг друга. Возникающая раз ность в положении идентичных точек изображений, называемая физиологическим параллаксом, дает возможность человеку оце нивать пространственную глубину предмета Стереоэффект в мозгу человека возникает при условии, что на зрительных осях его глаз располагаются идентичные точки изображений (предмета). Следовательно, если в момент возникновения стереоэффекта при рассматривании двух перекрывающихся фотоснимков оси глаз человека продолжить то они пересекутся в точке, лежащей на поверхности стере омодели, и пройдут через одноименные точки фотоснимков. Зафиксировав положение зрительных осей глаз относительно какой-либо неподвижной оси, мы получим угловые координаты наблюдаемых точек. Регистрации угловых положений осей визирования глаз оператора в пре лагаемом способе целесообразно вьтолнять относительно главных оптических осей соответствующих ветвей набгаодательной системы. Зная параметры оптической системы, угловое положение осей визирования глаз оператора, положение кареток стереопри5ора и места нулей измерительных устройс можно получить координаты идентичных гэчек фотоснимков стереопары. В связи с тем, что при рассматриванни объекта глаза оператора движутся не плавно, а скачками (макродвижения), регис трирование результатов измерений выполняю в моменты фиксаций, т.е. в моменты между скачками. Длительность фиксаций зависит от информационной емксюти рассматриваемых объектов и колеблется от 0,2 до 0.7 сек Скачки глаз происходят с очень большой амплитудой и высокой угловой скоростью, эти параметры позволяют надежно выявить фиксации. Выполнение же в момент текущей фиксации глаза п измерений позволяет повысить точность фиксирования углового положения осей визирования глаз примерно в VrT раз. В предложенном способе при возникновении стереоэффекта оператор рассматривает, например, точку А стере ом одели. Оси визирования его глаз проходят в этом случае через точки Oi и 01 фотоснимков 1 и 2. При наблюдении точки В стере ом одели глаза оператора повернутся на некоторые углы вокруг центров их вращения 3 и 4, центры зрачков переместятся из точек и с в точки Ъ° и Ъ° , а оси визирования глаз пройдут через точки Ъ и Ъ на фотоснимках 1 и 2. Фотоснимки 1 и 2 расположены на каретках обычного стереоприбара, перемещаемого в плоскости фотоснимков по двум взаимно перпендикулярным направлениям. Угловое положение осей визирования глаз оператора определяют путем измерения положения центров зрачков в какой-либо системе координат. С этой целью изображения глаз оператора выводят из наблюдательных ветвей с помощью частично серебренных зеркал 5 и 6. При использовании наблюдательной системы глаза оператора помещаются так, чтобы центры входных зрачков размещались в центрах О выходных зрачков 7 окуляров (см.фиг. 2). Рассматриваемое изображение располагается в плоскости 8, удаленной от центра выходного зрачка окуляра на расстояние наилучшего видения глаза (параметр окуляра, равен примерно 250 мм). За начало отсчета углового положения глаз целесообразно взять главный луч наблюдательной системы 00 . При рассматривании точки М изображения, глаз оператора повернется на угол d. , а измеряемая величина будет равна отрезку О М равному Д X . Для определения ее значения достаточно знать угол d ,например окуляра (отрезок 00 ) и радиус перемещения входного зрачка глаза оператора (от- резок КО ), Угол ° определяют путем измерения отрезка ОМ, лежащего в плоскости выходного зрачка 7 окуляра, величина 6 известна из паспорта окуляра и уточняется при юстировке; величина f определяется из специальных исследований. Таким образом, ко-ом (e-i-f oM кор Аналогично определяется величина в горизонтальной плоскости (см. фиг. 3). Для приведения значений данных величин к масштабу снимка необходимо учесть значение коэффициента увеличения V оптической наблюдательной системы: f. ДХ V По полученным данным определяют искомые величины координат точек фотоснимков (см. фиг. 4). (, , + п , Величины дх,д,лХ,4у определяют путем фиксирования положения кареток стере оприб ора. Предлагаемый способ позволяет получить наибольший эффект при использовании прибора аналитического типа, имеющего в
своем составе ЭВМ (см. фиг. 5). Оператор располагается за пиибором обычным образом, и после вьтолнения взаимного ориентирования фотоснимков с использованием измерительной марки, начинает последовательное рассматривание стереомодели либо по параллельным маршрутам, либо по орографическим линиям, захват в первом случае равен диаметру поля зрения наблюдательной системы. Длительность рассматривания модели определяют исходя из необходимой точ ности вьшолнения работ с учетом сложности рельефа местности. Измерительная марка при рассматривании стереомодели не тре буется. Входные зрачки 9 глаз 10 оператора находятся вблизи центров выходных зрач ков 11 окуляров 12. В процессе рассматривания стереомодели положение зрачков 9 меняется относительно зрачков 11. В фокальных плоскостях 13 окуляров 12 объе тивами 14 строятся изображения фотоснимков 15, которые освещаются источниками света 16. Свет от источников света 16, пройдя всю оптическую систему, освещает глаза оператора, изоб ражения которых с помощью объективов 17, пркзм-куб 18, име ющих частично серебренную внутреннюю грань, и окуляров 12, строятся в предметных плоскостях, например, телевизионных автоматов 19, осуществляющих определение пространственных координат входных зрачков 9 глаз оператора относительно центров выходных зрачков 11 окуляров 12, Телевизионные автоматы осуществляют автомати ческую фокусировку изображений глаз на экранах видеконов и определение величин v, z . На выходе телевизионных автоматов получают сигналы, пропорциональные величинам (Г2. к ,S,z, которые затем поступают в электронный ана лизатор 20 движений глаз, осуществляющ.ий определение фиксаций глаз по амплитуде и п. (0.1 скорости изменения координат о к и оу. Определив момент фиксации, анализатор 20 вырабатывает команды блоку 21 опроса датчиков Д и ду правого и левого фотоснимков. Величины ЛХ и Д.У , а также величины ( и (Jx синхронно направляются в блок 22, осушествляющий запись результатов измерений в цифровой форме.
В связи с тем, что оператор располагается за прибором свободно, его голова мо- жет перемещаться и при этом входные зрачки его глаз не совпадают с центрами выходных зрачков окуляров, что приводит к ошибкам измерений. Для исключения этих ошибок или уменьшения их влияния движения головы оператора можно ограничивать, либо компенсировать это влияние с использованием следящей системы, построенной, например, на принципе измерения аналогичными телевизионными автоматами блика от глаза, формируемого инфракрасным источником излученйя. и коррекции в реальном масштабе времени величин Эк и с использованием Р ° сигналов расфокусировки . Исключение же систематических ошибок, вызываемых смещением центра вращения глаз при визировании на различные точки стере ом одели, нес о ответствием длины измеряемого отрезка О М соответствующей наблюдаемой точки длине дуги перемещения зрачка глаза и т.п., вьятолняют путем исследования системы оператор-прибор по контрольньм сеткам и введения поправок в результататы измерений, например, по полиномам. Результаты измерений на приборе обрабатываются в ЭВМ, и полученные геодезические координаты Хр , У и Х точек служат либо для ортофототрансформирования, либо для рисовки рельефа местности. Формула изобретения Способ стереоскопического измерения координат точек фотоснимков, заключающийся в стереоскопическом измерении стереомодели и регистрации результатов измерений, отличающийся тем, что, с целью повышения производительности измерений, измерение стереомодели выполняют путем определения положения осей визирования глаз относительно главных оптических осей наблюдательной системы, а регистрацию положения осей визирования глаз вьшолняют в моменты текущей фиксации глаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стереоскопического определения координат точек фотоснимков | 1990 |
|
SU1800265A1 |
| Стереокомпаратор | 1977 |
|
SU678290A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU381890A1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕРЕОПАРЫ | 1990 |
|
RU2012916C1 |
| Стереокомпаратор | 1979 |
|
SU815500A1 |
| Стереокомпаратор | 1974 |
|
SU514192A1 |
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU194333A1 |
.
м
J, л
8
.5
Г
16
