(54) СТЕРЁОКОМПАРАТСР
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU194333A1 |
| Стереокомпаратор | 1979 |
|
SU815500A1 |
| Стереокомпаратор | 1981 |
|
SU987386A1 |
| Фотограмметрический прибор | 1982 |
|
SU1064134A1 |
| Способ стереоскопического измерения координат точек фотоснимков | 1975 |
|
SU551504A1 |
| Стереокомпаратор | 1974 |
|
SU514192A1 |
| Способ стереоскопического определения координат точек фотоснимков | 1990 |
|
SU1800265A1 |
| ОПТИЧЕСКАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА К СТЕРЕОФОТОГРАММЕТРИЧЕСКИМ ПРИБОРАМ | 1969 |
|
SU243848A1 |
| СТЕРЕОКОМПАРАТОРii44S»Rf-'iG'^i t^KA | 1971 |
|
SU322616A1 |
| ПЕРИСКОП ДЛЯ ПОДВОДНЫХ ЛОДОК | 2007 |
|
RU2373478C2 |
Изобретение относится к стереофотограмметрическому приборостроению и может быть sicпользовано при разработке новых стереофотограмметрических приборов, построенных по :компаратной схеме и включающих в свой состав устройство для рассматривания дополннтёль даго фотоснимка. Известны стереокомпараторы, содержандае две каретки фотоснимков, измерительную и оптическую наблюдателы1ые системы . Однако невозможность совместного стергаасопического наблюдения разномасштабных . (основных и дополнительных) фотоснимков снижает точность опознания опорных точек и не обеспечивает возможности измерения коорданат точек местности, не изобразившихся иа основных фот ошмках. Известен стереокомпаратор , содержащий две каретки основных фотоснимков, одну каретку дополнительного фотоснимка, измерительную систему, связанную с каретками основных фото снимков. 3. Оптическая система этого прибора имеет две ветви дЯя наблюдения основных сним iKOB, содержащие объективы, окуляры, паикраш ческие системы объективов и системы призм, /а для наблюдения дополнительного фотоснимка - третью ветвь, содержащую систему объективов, систему объективов Галилея и систему 1ФИЗМ. В этом стереокомпараторе увеличение ветвей наблюдательной системы основных фотосннмков изменяется плавно, а в ветви наблюл дательной системы дополнительного фотоснимка - дискретно. При работе la этом приборе оператор должен уравнивать масиггабы изобра-жгтпл основных и дополнительного фотоскимiKOB. Для этого он устанавтшает (дискретно) путем изменения положения системь объекти.вов Галилея увеличение в ветви дополнительного фотоснимка,подходящее для данного соотношения масипабов основных и дополнительного тоснИмков. Затем плавным изменением расстояния между объективами панкратической системы подбирает масштаб изображения в ветвях основных фотоснимков так, чтобы масштабы нзображешга основных фотоснимков и дополнительного бьши равны. Этот стереокомпаратор характеризуется сложностью оптической схемы и юстирования оптических наблюдательных ветвей основных фотоснимков, являющихся измернтельными, что обуславливается,в основном, использбв анием для плавного измене1шя увеличения паикратическнх систем объективов, имеющих в своем составе подвижные элементы. На- j личие подвижных элементов вызывает в процессе эксплуатации прибора и особенно при его транспортировке разъюстирование этих систем, а следовательно; и ухудшение качества изображения. Помимо этого, панкратические 10 системы накладывают ограничения на величину поля зреш{я. Все это приводит к снижешно точности стереоскопического визирова шя, т.е. к сниженик) точности обработки фoтocшiмкoв на приборе. .15
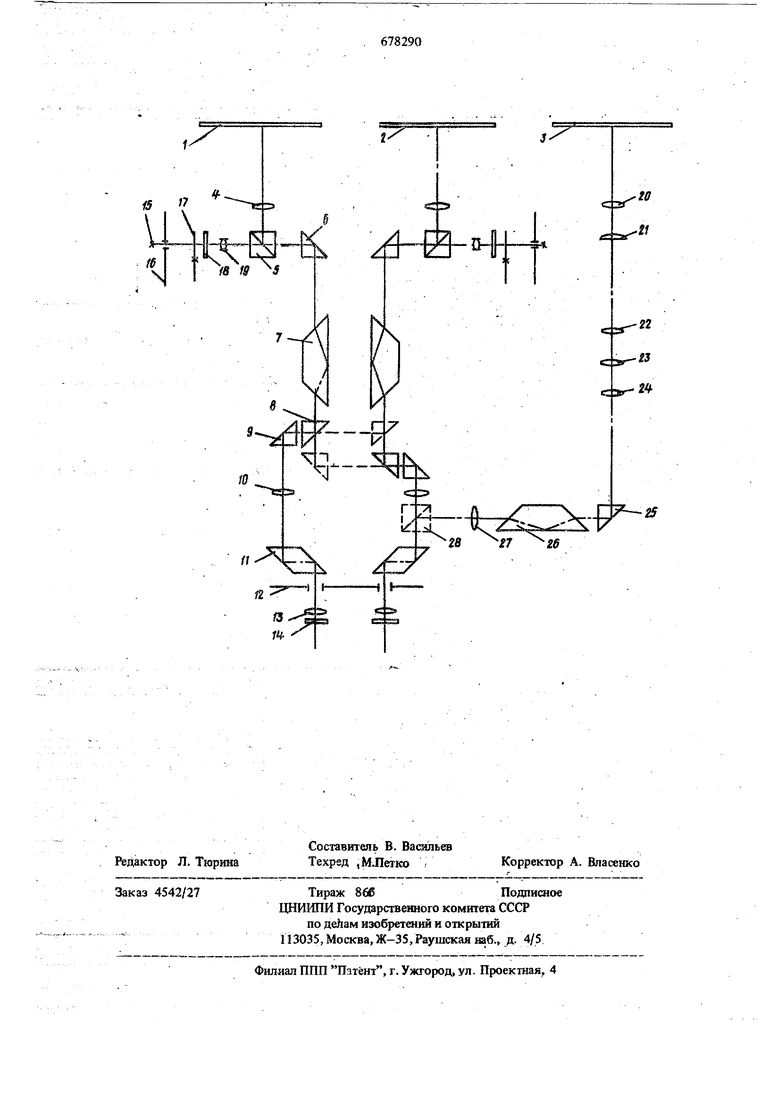
Целью изобретения является увеличегше точности измерения координат точек Основных фотоснимков. В описываемом стереокомпараторе это достигается тем, что между объективнэй частью ветви дополнительного фотоснимка 20 и окулярной частью ветви одного из основных фотоснимков введена панкратическая система объективов, которая и позволяет уравнйв ть масштабы изображений основных фотос1шмков с: дополнительным путем плавного изменения 25 увеличения дополнительного фотосни 1ка. В при.борё оптическая 1иблюдательная система основных фотоснимков имеет дискретное измене1 ше увеличения, а дополнительного фотоснимка ппавно-переменное. Дискретное изменение уве- зо личения ветвей основных фотоснимков достигается за счет сменных окуляров, а плавнопеременное в ветви дополнительного фотоснимка - панкратической системы объективов .На чертеже показана схема сгереокомпарато- 35 ра. --- (
Он содержит три оптические наблюдательные ветви: две симметричные ветви для наблюдения основных фотоснимков I и 2 и ветвь для рассматривания дополнительного фотоснимка 3. 40 Каждая оптическая ветвь для рассматрква шя основных фотосшлжов 2 и 2 состоит из объектавной части, призмы Дове, системы прямоугольных призм, окулярной части и системы измерительных марок. Объективная часть включает 45 объектив 4, призму - куб 5 с частично серебряной внутре шей гранью и прямоугольную призму 6. Передняя фокальная плоскость объектива 4 совмещена с плоскостью фотоснимка 1. Призма 7 Дове может вращаться относительно 50 оптической оси. Система прямоуголы1ых призм включает в себя призмы 8 и 9, а также объектив 10. Призма 8 может перемещаться в положетае, показанное на чертеже пунктиром. объективами 4 и 10 ход лучей - параллель- 55 ный. Окулярная .часть включает призму-ромб 11, которая может поворачиваться относительбю оптической оси объектива 10, диафрагму 12,сменные с различными увеличениями окув7В290
ляры 13 и ОПТИЧЕСКИЙ,клин 14, поворачивающийся относительно оптической оси окуляра 13. Задняя фокальная плоскосэъ объектива 10 совмещена с передней фокальной плоскостью окуляра 13. Система измерительных марок вклю;чает 15 света, диафрагму -16, вращаю1ЩИЙСЯ диск 17 с награвированными различной формы и размера визирными марками, цветной фильтр 18 и объектив 19, передняя фокальная плоскость которого совмещена с плоскостью измерительных марок. Оптическая ветвь для рассматривания допожштельного фотоснимка 3 состоит из объективной части, узла переменного з еличения, призмы Дове и окулярной часта, являющейся окулярной частью одной из ветвей основных фотоснимков. Обьектинная часть включает объектив 20 и коллек:тив 21. Объектив 20 расположен так, что на коллективе. 21 строится резкое изображение дополнительного фотоснимка 3, зшеличениое в Vi раз. Узел переменного увеличения включает подвижный объектив 22, коллектив 23, объектив 24 и прямоугольную призму 25. Элементы 22, 23 и 24 составляют пйп рат1иеску1о систему и позволйют плавно изменят, увеличение от Va до УЗ. Увеличение Vj, а также iдиапазон }величеннй Vj-Vj рассчитьшают исходя из возможных масштабов основных и дополнительных фотоснимков. Призма 26 Дове может вращаться относительно оптической оси. Окулярная часть включает объектив 27, призмукуб 28 с частично серебряной вн5/тренней гранью, а также окулярную часть 1вет8и одного из основных фотоснимков. Задняя фокальная плоскость объектива 27 совмещена с- передней фокальной плоскостью окуляра 13.
Изображения фотоснимков 1 и 2 передаются; |объективами 4 в призмы-куб 5, где они совме:щаются с изображенияпЛи измерительных марок 1на диске 17. Благодаря налич1Ж) цветных фильтров 18 измерительные марки могут изменять рет. Совмещенные изображения фотоснимков и измерительных марок с помощью призМ 6 поступают в призмы 7, вращая которые, one- ратор яюжет развора швгть изображения в сво-. ей плоскости на 360°.Далее изображения попадают в системы прямоугольных призм 8 и 9, спужзшие для пе{жключеиня осей визировашш. Оператор, меияя положение призм 8 и 9, может направлять изображение правого фотосгшмка в левый гааз, а левого - в правый. Объективы 10, в которые попадают затем изображения, направляют их в призмы 11, синхроюю в разные стороны вращая которые оператор может устанавливать нужный глазной базис. Оператор р;ассматривает увеличенные окулярами изображения через оптические клинья, врал(ая которые он может устранять свое косоглазие. ; В комплекте прибора предусмотрен набор сменных окуляров, имеющих различное увеличение и устанавливаемых оператором ь зависимости от вида выполняемых на приборе работ. Изображение дополнительного фотоснимка 3 строится объективом 20 ни выпуклой поверх ности коллектива 21 с расчетным постоянным увеличением. Коллектив 21 направляет изображение в паикратическую систему(Гэлементы 22, 23 и 24). Оператор, перемещая объектив 22, можбт менять увеличение в расчетном диапазон а вращая призму Дове, куда затем через призму 25 попадает изображение, может развора вать его в своей плоскости на 360. Далее изо бражение попадает в объектив 27, который направляет его через призму 28 в один из окуляров. При рассматривании основного фотосю1мка с дополнительным неиспользуемый фотоснимок перекрьшается светонепроницаемой шторкой, установленной между фотосгшмком 1 (или 2) и объективами .10 {шторки на чертеже не по казаны). В этом случае в качестве измершгельнэй мерки для дополнительного фотоснимка используется измерительная марка ветви неисшльзуемого фотоснимка. При работе на приборе оператор, исходя из качества фотоснимков и требуемой точности йзмерений, устанавливает в наблюдательных ветвях основных фотоснимков окуляры, даюшяе оптимальное увеличение. Затем плавньгм Измене1й1ем увеличения в ветви дополнительного фотоснимка добивается равенства масшта бов изображения основного и дополнительног-о фотоснимков. Использование описываемого стереокомпаратора позволяет путем улучшения условий стереоскопического визирования повысить точность тмерения на приборе координат точек основных фотоснимков., Формула изобретения Стереокомпаратор, содержащий две каретки основных фотоснимков, од$1у каретку дополнительного фотоснимка, измерительную систему, связанную с каретками основных фотоснимков, шблюдательную систему с двумя оптическими ветвями основных фотоснимков, каждая из которых содержит объективную и окулярную части, и одну ветВь дополнительного фотоснимка, объективная часть которой оптически связана с окулярной частью одной ветви основного фотоснимка, отличающийся тем, что, с целью увеличения точности измерения координат точек основный фотоснимков, между объективной частью ветви дополнительного фотоснимка и окулярной частью ветви одного из основных фотоснимков введена панкратическая система объективов. Истошшки информации, принятые во внимание при экспертизе. 1. Авторское свидетельство СССР N 199433, кл. G 01 С 11/04, 1965. 2; Дробьшхев Ф. В. Основы аэрофотосъемки и фотограмметрии. М., 1973, с. 112-119. 3. у торсксе свидетельство СССР № 194333, кл. G 01 С 11/10, .
