Изобретение относится к бортовым аналоговым и цифроаналоговым системам управления беспилотными летательными аппаратами (БПЛА), в которых используются рулевые приводы.
Наиболее близким к предлагаемому изобретению является способ формирования сигнала управления рулевым приводом беспилотного летательного аппарата, содержащий задание сигнала управления, усиление заданного сигнала управления, ограничение усиленного заданного сигнала управления, измерение сигнала отклонения руля, вычитание из ограниченного сигнала управления сигнала отклонения руля, фильтрацию сигнала вычитания, усиление отфильтрованного сигнала, формирование текущего скоростного сигнала отклонения руля, масштабирование скоростного сигнала отклонения руля, вычитание из усиленного отфильтрованного сигнала масштабированного скоростного сигнала отклонения руля и отработку текущего сигнала отклонения руля исполнительным механизмом [1].
Наиболее близким к предлагаемому изобретению является устройство управления рулевым приводом беспилотного летательного аппарата, содержащее последовательно соединенные задатчик сигнала управления, первый усилитель, ограничитель сигнала, первый элемент вычитания, инерционный фильтр, второй усилитель, второй элемент вычитания, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого является выходом устройства и через датчик сигнала угла отклонения соединен со вторым входом первого элемента вычитания, выход исполнительного устройства через последовательно соединенные датчик сигнала скорости отклонения и инерционный усилитель соединен со вторым входом второго элемента вычитания [1].
Недостатками известных способа и устройства являются ограниченные функциональные возможности в условиях расширенного диапазона условий полета по высоте и скорости и невысокая точность управления БПЛА в целом, что усиливается возмущающим фактором для рулевых приводов - шарнирным моментом Мш [2, 3].
Техническим результатом изобретения является расширение функциональных возможностей и повышение точности управления БПЛА.
Предложенным формированием способа и построением устройства управления по этому способу достигается функциональная возможность более качественного управления летательным аппаратом в расширенном диапазоне высот и скоростей полета с ограничением частот и амплитуд колебаний контура рулевого привода, а также повышение точности управления в условиях действия возмущающих факторов на рулевой привод - шарнирного момента Мш.
Указанный технический результат достигается тем, что в известный способ формирования сигнала управления рулевым приводом беспилотного летательного аппарата, содержащий задание сигнала управления, усиление заданного сигнала управления, ограничение усиленного заданного сигнала управления, измерение сигнала отклонения руля, вычитание из ограниченного сигнала управления сигнала отклонения руля, фильтрацию сигнала вычитания, усиление отфильтрованного сигнала, формирование текущего скоростного сигнала отклонения руля, масштабирование скоростного сигнала отклонения руля, вычитание из усиленного отфильтрованного сигнала масштабированного скоростного сигнала отклонения руля и отработку текущего сигнала отклонения руля исполнительным механизмом, дополнительно введены измерение скоростного напора, измерение угла атаки, измерение коэффициента эффективности шарнирного момента от угла атаки, умножение полученных трех сигналов, измерение коэффициента шарнирного момента от отклонения руля, дополнительное умножение сигналов скоростного напора, коэффициента эффективности шарнирного момента от отклонения руля и сигнала отклонения руля, суммирование сигналов первого и дополнительного умножений и формирование текущего сигнала скорости с учетом его нечувствительности в зоне текущего значения шарнирного момента.
Указанный технический результат достигается также и тем, что в известное устройство управления рулевым приводом беспилотного летательного аппарата, содержащее последовательно соединенные задатчик сигнала управления, первый усилитель, ограничитель сигнала, первый элемент вычитания, инерционный фильтр, второй усилитель, второй элемент вычитания, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого является выходом устройства и через датчик сигнала угла отклонения соединен со вторым входом первого элемента вычитания, выход исполнительного устройства через последовательно соединенные датчик сигнала скорости отклонения и инерционный усилитель соединен со вторым входом второго элемента вычитания, дополнительно введены датчик скоростного напора летательного аппарата, последовательно соединенные: датчик угла атаки, первый умножитель сигналов, суммирующий усилитель и усилитель с зоной нечувствительности, второй вход которого соединен с выходом второго элемента вычитания, а выход - со входом исполнительного устройства, задатчик коэффициента эффективности шарнирного момента по углу атаки, выход которого соединен со вторым входом первого умножителя сигналов, третий вход которого соединен с выходом датчика скоростного напора, последовательно соединенные задатчик коэффициента эффективности шарнирного момента по углу отклонения руля, второй умножитель сигналов, второй вход которого соединен с выходом датчика скоростного напора, третий вход - с выходом исполнительного механизма, а выход - со вторым входом суммирующего усилителя.
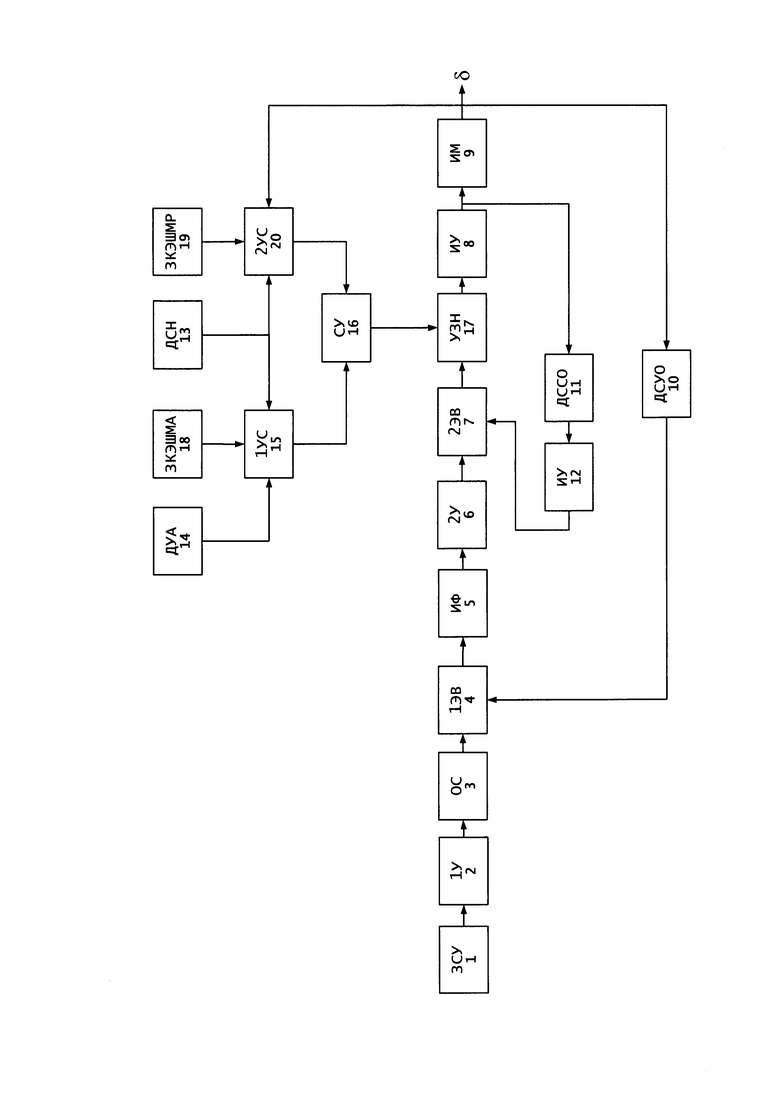
На чертеже представлена блок-схема устройства управления рулевым приводом беспилотного летательного аппарата.
Устройство управления рулевым приводом беспилотного летательного аппарата, содержащее последовательно соединенные задатчик сигнала управления 1 (ЗСУ), первый усилитель 2 (1У), ограничитель сигнала 3 (ОС), первый элемент вычитания 4 (1ЭВ), инерционный фильтр 5 (ИФ), второй усилитель 6 (2У), второй элемент вычитания 7 (2ЭВ), последовательно соединенные исполнительное устройство 8 (ИУ) и исполнительный механизм 9 (ИМ), выход которого является выходом устройства и через датчик сигнала угла отклонения 10 (ДСУО) соединен со вторым входом первого элемента вычитания 4 (1ЭВ). Выход исполнительного устройства 8 (ИУ) через последовательно соединенные датчик сигнала скорости отклонения 11 (ДССО) и инерционный усилитель 12 (ИУ) соединен со вторым входом второго элемента вычитания 7 (2ЭВ). Устройство содержит датчик скоростного напора 13 (ДСН) летательного аппарата, последовательно соединенные: датчик угла атаки 14 (ДУА), первый умножитель сигналов 15 (1УС), суммирующий усилитель 16 (СУ) и усилитель с зоной нечувствительности 17 (АУЗН), второй вход которого соединен с выходом второго элемента вычитания 7 (2ЭВ), а выход соединен со входом исполнительного устройства 8 (ИУ), задатчик коэффициента эффективности шарнирного момента по углу атаки 18 (ЗКЭШМА), выход которого соединен со вторым входом первого умножителя сигналов 15 (1УС), третий вход которого соединен с выходом датчика скоростного напора 13 (ДСН), последовательно соединенные задатчик коэффициента эффективности шарнирного момента по углу отклонения руля 19 (ЗКЭШМР), второй умножитель сигналов 20 (2УС), второй вход которого соединен с выходом датчика скоростного напора 13 (ДСН) третий вход соединен с выходом исполнительного механизма 9 (ИМ), а выход - со вторым входом суммирующего усилителя 16 (СУ).
Устройство управления рулевым приводом беспилотного летательного аппарата работает следующим образом.
Задающим сигналом для работы рулевого привода является сигнал σзад., формируемый задатчиком сигнала управления 1. Сигнал σзад. поступает на первый усилитель 2, с выхода которого снимается сигнал σзад. ус.:

где  - коэффициент усиления первого усилителя 2.
- коэффициент усиления первого усилителя 2.
Блок 2 позволяет подобрать коэффициент с точки зрения обеспечения компенсации погрешностей, передаточных соотношений редуктора привода.
Сигнал σзад. ус. с первого усилителя 2 поступает на ограничитель сигнала 3, на выходе которого формируется сигнал  :
:
Ограничитель сигнала 3 позволяет достаточно точно соотнести предельные максимальные уровни отрабатываемых сигналов смежных каналов управления БПЛА с уровнями отклонений рулевого привода δ.
Сформированный сигнал является непосредственно задающим сигналом для привода. А именно. Он поступает на второй вход первого элемента вычитания 4, на первый вход которого поступает сигнал обратной связи по положению σδ от датчика сигнала угла отклонения 10.
Сигнал рассогласования Δσ с блока 4:

поступает на инерционный фильтр 5 для отфильтровывания от флуктуационных составляющих, препятствующих качественной работе контура привода. Передаточная функция инерционного фильтра 5 имеет вид:

где Т - постоянная времени.
Сигнал U1 с выхода фильтра 5 поступает на второй усилитель 6.
С его выхода сигнал U2:

где  - коэффициент усиления второго усилителя 6 - поступает на второй элемент вычитания 7. При этом выбор коэффициента производится с точки зрения обеспечения статической точности привода. Работа рулевого привода по включению исполнительного устройства 8 производится усилителем с зоной нечувствительности 17. Пусть величина этой зоны равна ϕ0. При заданной статической точности Δст. по рассогласованию Δσ имеем соотношение:
- коэффициент усиления второго усилителя 6 - поступает на второй элемент вычитания 7. При этом выбор коэффициента производится с точки зрения обеспечения статической точности привода. Работа рулевого привода по включению исполнительного устройства 8 производится усилителем с зоной нечувствительности 17. Пусть величина этой зоны равна ϕ0. При заданной статической точности Δст. по рассогласованию Δσ имеем соотношение:

откуда 
Во втором элементе вычитания 7 формируется сигнал Uупp:

где σс - сигнал скоростной обратной связи, формируемый инерционным усилителем 12 датчика сигнала скорости отклонения 11 привода.
Передаточная функция инерционного усилителя 12 имеет вид:
где Киу и Тиу - соответственно коэффициент усиления и постоянная времени, определяющие качество динамики процесса отработки контуром привода задающих воздействий.
Исполнительное устройство 8 привода формирует скоростную характеристику:

например, релейного вида.
Исполнительный механизм 9 отклоняет руль:

Варьирование значения зоны нечувствительности ϕ0 обеспечивает ее положительную функциональную зависимость от шарнирного момента Мш, от угла атаки α (в канале курса от угла скольжения β) и отклонения руля δ, а также доминирующим образом от скоростного напора q. Действительно шарнирный момент Мш, действуя на привод, в соответствии с его нагрузочной характеристикой уменьшает скоростную характеристику привода δ. Из этого обстоятельства следует целесообразность введения зависимости значения зоны нечувствительности ϕ0 от расчетного значения шарнирного момента Мш, уменьшая ее в управляющей части привода в обратно пропорциональной зависимости от Мш. При большой кратности изменения скоростного напора q от qmin до qmax коэффициент кратности Кq скоростного напора и коэффициент кратности шарнирного момента составляют:


Для реализации зависимости (13) целесообразно ввести ее «сжатие», например, введением преобразования корня n-ой степени:
с целью технической реализации зоны нечувствительности.
Так, значение зоны нечувствительности ϕ0 не может быть значительным, а должно быть равным 1,05-1,2 зоны нечувствительности исполнительного механизма 9. Этим обстоятельством определяется значение корня n. Формирование зоны нечувствительности ϕ0 реализовано блоками 13-20. В блоке 17 конкретно реализуется закон варьирования величины зоны нечувствительности ϕ0 в функции Мш с ограничениями по зависимостям (13) и (14).
Все блоки устройства управления являются стандартными и могут быть реализованы программно - алгоритмически на основе вычислительной техники.
Таким образом, предложенное устройство позволяет расширить функциональные возможности управления приводом и повысить качество управления в целом, включая ограничения параметров автоколебаний в контурах управления и собственно в рулевом приводе, обеспечивая высокий ресурс и сохраняя положительное свойство - вибрационную линеаризацию нелинейностей и большую часть скоростной характеристики для отработки рабочих управляющих воздействий.
Полученный положительный результат подтвержден моделированием и натурными работами.
Источники информации
1. Патент РФ №2263338, G05D 11/14, 2005.
2. А.А. Лебедев, Л.С. Чернобровкин. Динамика полета беспилотных летательных аппаратов. М., Машиностроение, 1973, с. 338-344.
3. А.А. Кириллов, В.Г. Стеблецов. Основы электропривода летательных аппаратов. М., Библио-Глобус, 2013, с. 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ФРИКЦИОННЫМ ЭЛЕКТРОПРИВОДОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2263338C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления | 2016 |
|
RU2631736C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
Группа изобретений относится к способу и устройству формирования сигнала управления рулевым приводом беспилотного летательного аппарата (БПЛА). Для формирования сигнала управления задают сигнал управления, усиливают его и ограничивают, фильтруют сигнал вычитания, усиливают отфильтрованный сигнал, формируют текущий скоростной сигнал отклонения руля и масштабируют его, отрабатывают текущий сигнал отклонения руля исполнительным механизмом, при этом дополнительно измеряют скоростной напор, угол атаки, коэффициент эффективности шарнирного момента от угла атаки и от отклонения руля, формируют текущий сигнал скорости с учетом его нечувствительности в зоне текущего значения шарнирного момента определенным образом. Устройство содержит задатчик сигнала управления, два усилителя сигнала, ограничитель сигнала, два элемента вычитания, инерционный фильтр, исполнительное устройство и исполнительный механизм, датчик сигнала угла отклонения, датчик сигнала скорости отклонения, инерционный усилитель, датчики скоростного напора и угла атаки, задатчики коэффициента эффективности шарнирного момента от отклонения руля и по углу атаки, два умножителя, суммирующий усилитель, усилитель с зоной нечувстительности, соединенные определенным образом. Обеспечивается расширение функциональных возможностей и повышение точности управления БПЛА. 2 н.п. ф-лы, 1 ил.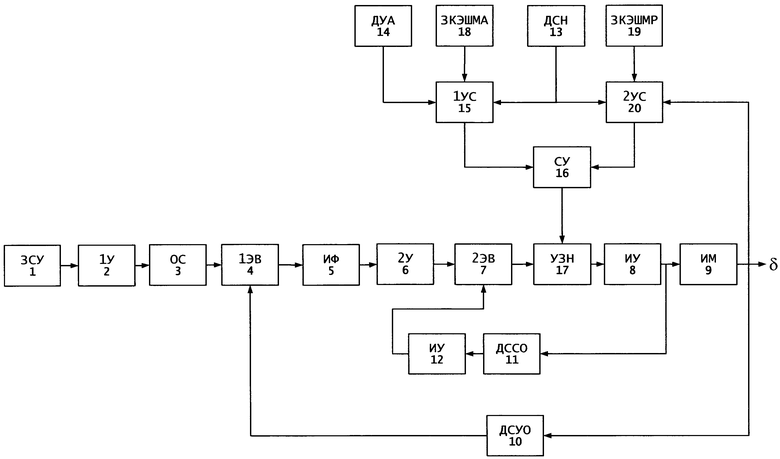
1. Способ формирования сигнала управления рулевым приводом беспилотного летательного аппарата, содержащий задание сигнала управления, усиление заданного сигнала управления, ограничение усиленного заданного сигнала управления, измерение сигнала отклонения руля, вычитание из ограниченного сигнала управления сигнала отклонения руля, фильтрацию сигнала вычитания, усиление отфильтрованного сигнала, формирование текущего скоростного сигнала отклонения руля, масштабирование скоростного сигнала отклонения руля, вычитание из усиленного отфильтрованного сигнала масштабированного скоростного сигнала отклонения руля и отработку текущего сигнала отклонения руля исполнительным механизмом, отличающийся тем, что дополнительно введены измерение скоростного напора, измерение угла атаки, измерение коэффициента эффективности шарнирного момента от угла атаки, умножение полученных трех сигналов, измерение коэффициента шарнирного момента от отклонения руля, дополнительное умножение сигналов скоростного напора, коэффициента эффективности шарнирного момента от отклонения руля и сигнала отклонения руля, суммирование сигналов первого и дополнительного умножений и формирование текущего сигнала скорости с учетом его нечувствительности в зоне текущего значения шарнирного момента.
2. Устройство управления рулевым приводом беспилотного летательного аппарата, содержащее последовательно соединенные задатчик сигнала управления, первый усилитель, ограничитель сигнала, первый элемент вычитания, инерционный фильтр, второй усилитель, второй элемент вычитания, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого является выходом устройства и через датчик сигнала угла отклонения соединен со вторым входом первого элемента вычитания, выход исполнительного устройства через последовательно соединенные датчик сигнала скорости отклонения и инерционный усилитель соединен со вторым входом второго элемента вычитания, отличающееся тем, что в него введены датчик скоростного напора летательного аппарата, последовательно соединенные: датчик угла атаки, первый умножитель сигналов, суммирующий усилитель и усилитель с зоной нечувствительности, второй вход которого соединен с выходом второго элемента вычитания, а выход - со входом исполнительного устройства, задатчик коэффициента эффективности шарнирного момента по углу атаки, выход которого соединен со вторым входом первого умножителя сигналов, третий вход которого соединен с выходом датчика скоростного напора, последовательно соединенные задатчик коэффициента эффективности шарнирного момента по углу отклонения руля, второй умножитель сигналов, второй вход которого соединен с выходом датчика скоростного напора, третий вход - с выходом исполнительного механизма, а выход - со вторым входом суммирующего усилителя.
| УСТРОЙСТВО УПРАВЛЕНИЯ ФРИКЦИОННЫМ ЭЛЕКТРОПРИВОДОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2263338C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2303805C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО МОМЕНТА РУЛЕВЫХ ОРГАНОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243526C1 |
| US 8725321 B2, 13.05.2014. | |||

