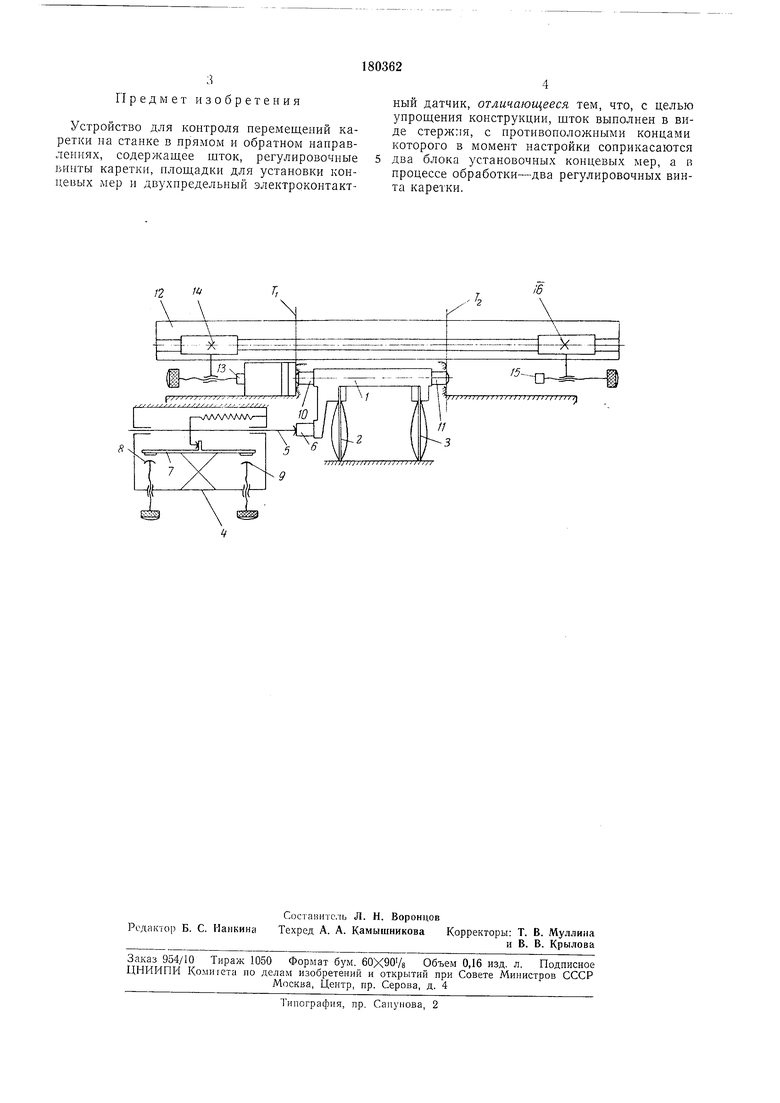
Известны устройства для контроля перемещений кареток станков, содержащие шток, каретку с регулировочными винтами, площадки для установки концевых мер и двухпредельный электрокоптактлый датчик. Предлагаемое устройство отличается тем, что шток выполнен в виде стержня, концы которого в момент настройки контактируют с двумя блоками установочных концевых мер, а в процессе обработки - с регулировочными винтами перемещающейся каретки. При этом положение штока (стержня) контролируется с помощью электроконтактного датчика. Таким образом, можно нроконтролировать (ограничить) как прямой, так и обратный ход каретки с помощью одного двухпредельного датчика, что упрощает конструкцию устройства. На чертеже дана схема устройства. Шток 1 устройства подвешен на пружинах 2 и 5 в нейтральном полол ении, причем усилие этих пружин в 5-10 раз больше измерительного усилия датчика 4. Датчик имеет свой шток 5, опирающийся на нижнюю пятку штока /. Датчик устанавливают таким образом, чтобы его рычаг 7 находился в среднем ноложении, не касаясь ни одного из контактов 5 и 9. Верхние пятки 10 и // штока / выступают за базовые плоскости Т и корпуса на 5 10 15 20 6 25 30 некоторую величину (0,2-0,3 м.ч) н имеют скругления большого радиуса. При настройке на заданный размер из нлоскопараллельных концевых мер длины набирают блок, соответствующий заданному размеру. Этот блок нри ходе кареткн 12 внраво ее винтом 13 поджимается к базовой плоскости Т. При этом шток / вместе со штоком 5 датчика смещается вправо. С вг1пта настраивают правый контакт датчика. Положение винта 13 фиксируется стопором 14. Затем блок концевых мер снимают, и каретка 12 проходит расстояние, равное заданному размеру, т. е. до совпадения конца винта 13 с плоскостью TI. В этот момент замыкается правый контакт датчнка, который выдает сигнал на останов станка или другую команду. Для настройки хода кареткн в протнвоположном направленни нужный блок концевых мер устанавлнвают между винтом 15 плоскостью Го. При этом шток / и шток 5 сместятся влево. С помощью винта настраивают другой контакт датчика. Положение винта /,- фиксируется стопором 16. Блок концевых мер снимают, и каретка Г2 проходит расстояние, равное заданному размеру, т. е. до совпадения конца винта 15 с плоскостью Го. В этот момент замыкается левый контакт датчика н выдается соответствующая команда.
Предмет изобретения
Устройство для контроля неремещений каретки на станке в прямом и обратном нанравлениях, содержащее шток, регулировочные винты каретки, нлощадки для установки концевых мер и двухнредельный электроконтактныи датчик, отличающееся тем, что, с целью упрощения конструкции, щток выполнен в виде стержмя, с нротивоположными концами которого в момент настройки соприкасаются два блока установочных концевых мер, а в процессе обработки-два регулировочных винта каретки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЛИБР-НУТРОМЕР И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ МЕРНОГО СТЕРЖНЯ КАЛИБРА-НУТРОМЕРА | 2005 |
|
RU2290599C1 |
| Устройство для измерения диаметров | 1989 |
|
SU1611715A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ | 1967 |
|
SU201932A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 1973 |
|
SU381865A1 |
| Устройство для настройки расточных резцов | 1985 |
|
SU1227350A1 |
| Электроэрозионный станок | 1981 |
|
SU963786A1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Устройство для настройки датчика по аттестованным деталям и блоку концевых мер длины | 1960 |
|
SU150642A1 |
| Лабораторная дождевальная установка | 1983 |
|
SU1287786A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ФОРМЫ и РАСПОЛОЖЕНИЯ КОНТАКТНОЙ ЛИНИИ КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1972 |
|
SU356445A1 |
/2
