лого цилиндра. Измерительный орган снабжен двумя крестообразными фланцами, каждый из которых связан с одним из торцов соответствующего полого цилиндра, и преобразователями угловых перемещений, взаимодействующими с соответствующими фланцами. 8 одном случае неподвижный элемент преобразователя расположен на втором торце полого цилиндра, а фланцы закреплены посредством оси, один из торцов которой.выполнен сферическим и связан с подвижным элементом преобразователя. В другом случае фланцы закреплены посредством упругих подвесов, а каждый из преобразователей выполнен в виде размещенной в полости соответствующего полого цилиндра с возможностью осевого перемещения каретки и установленных на ней светоисточника и светоприемника, а поверхности фланцев, обращенные к соответствующим кареткам, выполнены зеркальными. 2 з.п. ф-лы, 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ГИБКОГО МАНИПУЛЯТОРА | 2019 |
|
RU2721769C1 |
| Измерительный орган робота для контроля линейных размеров | 1988 |
|
SU1548655A1 |
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ ИЗ ЧУРАКА ЦИЛИНДРА МАКСИМАЛЬНОГО ОБЪЕМА С МЕХАНИЗМОМ ПРИЕМА, ПОДАЧИ И УДАЛЕНИЯ, МЕХАНИЗМОМ ЗАХВАТА И КООРДИНАЦИИ С СИСТЕМОЙ ИЗМЕРЕНИЯ И МЕХАНИЗМОМ ОБРАБОТКИ С ФРЕЗОЙ И МУФТОЙ ПОДСОЕДИНЕНИЯ ЕЕ К ПРИВОДУ, ВКЛЮЧАЯ МОНТАЖНУЮ СХЕМУ УСТАНОВКИ ПРИВОДА | 2010 |
|
RU2480328C2 |
| ГИРОСКОП | 2005 |
|
RU2298151C1 |
| ТРЕНАЖЕР | 2000 |
|
RU2201784C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| Стенд для измерения толщины компенсатора при сборке редуктора | 1985 |
|
SU1265457A1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ КОНИЧЕСКОЙ РЕЗЬБЫ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО РЕЗЬБОВОГО УЧАСТКА НЕФТЕПРОМЫСЛОВОЙ ТРУБЫ, И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302935C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
Изобретение относится к измерительной технике, в частности к устройствам для контроля размеров в машиностроении. Цель изобретения - расширение функциональных возможностей за счет измерения не только линейных, но и угловых параметров. Измерительный орган s робота содержит основание, размещенные на нем с возможностью относительного перемещения две каретки, размещенные на соответствующих каретках направляющие штанги и муфты, попарно соединяющие штанги между собой. Каждая из муфт выполнена в виде по
Изобретение относится к измерительной технике, в частности, к устройствам для контроля размеров в машиностроении и может быть использовано, например, в системах автоматического контроля,
. Целью изобретения является расширение функциональных возможностей за счет измерения не только линейных, но и угловых перемещений путем одновременного размерного контроля детали по параметрам длины, наружного и внутреннего диаметров, а также перпендикулярности торцевых плоскостей. Использование предлагаемого изобретения позволяет по сравнению с существующими средствами контроля автоматизировать контрольно-измерительные операции и значительно поднять производительность размерного контроля деталей типа втулок, колец, трубок, пружин сжатия и т.п., повысить культуру производства,
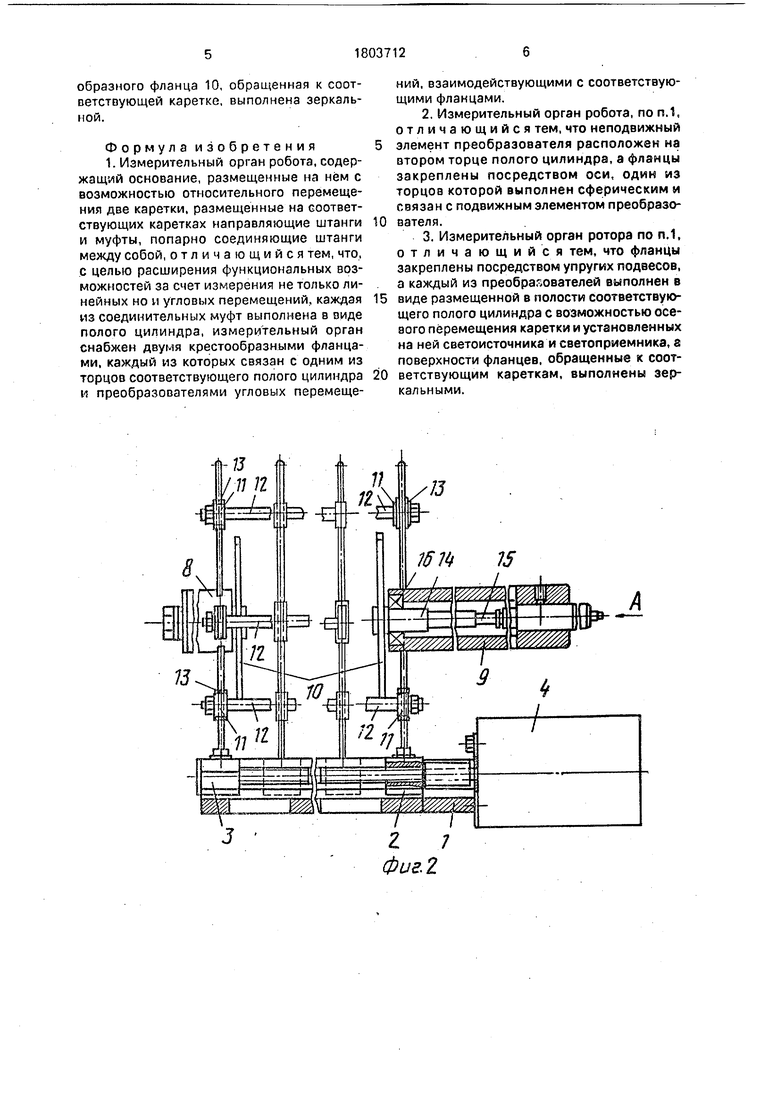
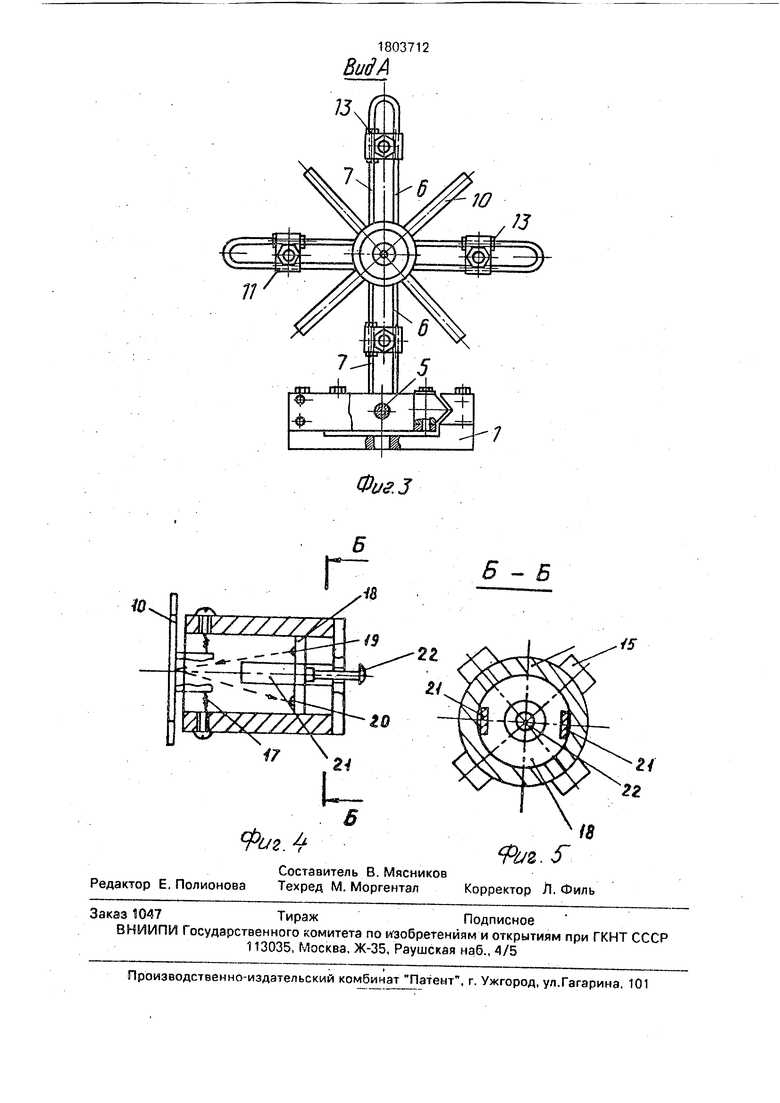
. На фиг.1 представлен измерительный орган робота, общий вид; на фиг.2 - схема привода кареток и установки устройства контроля перпендикулярности торцев детали к её оси в одном исполнении; на фиг.З - вид по стрелке А на фиг.2; на фиг.4 - устройство контроля перпендикулярности в другом исполнении; на фиг.5 - разрез Б-Б на фиг.4.
Измерительный орган робота содержит (фиг.1) основание 1, предназначенное для стыковки с другими органами робота. Размещенные на основании с возможностью относительного перемещения каретки 2 и 3 выполнены а виде гаек и перемещаются посредством двигателя 4 и шарико-винтовой передачи 5, выполненной в виде винта с правой и левой резьбой. На каретках 2 и 3 установлены направляющие штанги 6 и 7, соединенные попарно полыми цилиндрами 8 и 9 устройств контроля перпендикулярности торцев измеряемой детали, на каждом из которых не менее шести направляющих
штанг. Штанга 6 выполнена гладкой, а штанга 7 в виде винта. В полых цилиндрах 8 и 9 установлены крестообразные фланцы 10 с возможностью качательного движения. На
штангах 6 и 7 установлены с возможностью перемещения по ним ползуны 11, в которых закреплены измерительные щупы 12 с возможностью вращения вокруг своих осей и перемещения по ползуну 11 в плоскости,
перпендикулярной соответствующей паре направляющих штанг 6 и 7 с настройкой регулировочными гайками 13. Измерительные щупы 12, размещенные на одной каретке измеряют наружный диаметр, а на другой
- внутренний. Для измерения длины детали используется датчик линейных перемещений в виде электролинейки, закрепленной на одной из кареток (не показано).
Устройство контроля перпендикулярности торцев детали в одном исполнении (фиг.2 и 3) состоит из крестообразного фланца 10 и закрепленного на одном конце измерительного элемента 14, другой конец которого своей сферообразной поверхностью контактирует с преобразователем 15. Измерительный элемент 14 выполнен в виде оси, посаженной в полом цилиндре на опоре 16 (например, двухрядном сферическом подшипнике) с возможностью самоустановки крестообразного фланца 10.
Устройство контроля перпендикулярно- сти торцев детали в другом исполнении (фиг.4 и 5) состоит из крестообразного фланца 10, закрепленного а полом цилиндре посредством упругого подвеса 17, а преобразователь выполнен в виде размещенной в полости полого цилиндра каретки
18 и установленных на ней светоисточника
19 и светоприемника 20, которая может пе- ремещаться вдоль оси полого цилиндра по направляющей 21. Это перемещение регулируется винтом 22, а поверхность крестообразного фланца 10, обращенная к соот- ветстоующей каретке, выполнена зеркальной.
Формула изобретения 1. Измерительный орган робота, содержащий основание, размещенные на нём с возможностью относительного перемещения две каретки, размещенные на соответствующих каретках направляющие штанги и муфты, попарно соединяющие штанги между собой, отличающийся тем, что, с целью расширения функциональных возможностей за счет измерения не только ли- нейных но и угловых перемещений, каждая из соединительных муфт выполнена в виде полого цилиндра, измерительный орган снабжен двумя крестообразными фланцами, каждый из которых связан с одним из торцов соответствующего полого цилиндра и преобразователями угловых перемещений, взаимодействующими с соответствующими фланцами.
| Прибор для измерения внутренних и наружных размеров | 1985 |
|
SU1280301A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 4524524, кл..33-168, 1987 | |||
| Измерительный орган робота для контроля линейных размеров | 1988 |
|
SU1548655A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
