Данное изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости с двухстепенным упругим подвесом чувствительного элемента.
Известны гироскопы [1], содержащие двигатель, ротор, преобразователи положения, преобразователи момента магнитоэлектрического типа, узел двухстепенного упругого подвеса.
Наиболее близким по технической сущности является гироскоп [2], содержащий корпус, первую и вторую крышки на противоположных торцах корпуса, установленные в корпусе статор двухфазного гистерезисного двигателя, внешние кольца шарикоподшипников привода, неподвижные части первого и второго преобразователей положения, оправку с бескаркасными компенсационными катушками первого и второго преобразователей момента магнитоэлектрического типа, установленный во внутренних кольцах шарикоподшипников привода вал с ротором двигателя со стороны первой крышки и расположенным со стороны второй крышки узлом двухстепенного упругого подвеса, на котором расположен узел ротора гироскопа с постоянными магнитами преобразователей момента, причем узел двухстепенного упругого подвеса содержит первый узел однорамочного подвеса и второй узел однорамочного подвеса; первый узел однорамочного подвеса содержит подвижную часть, внутреннюю рамку и неподвижную (относительно вала) часть, внутренняя рамка соединена с подвижной частью двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в первой плоскости, неподвижная часть соединена с внутренней рамкой двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в перпендикулярной первой плоскости второй плоскости, второй узел однорамочного подвеса содержит первую и вторую торцевые части и расположенную между ними центральную часть, первая торцевая часть соединена с центральной частью двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в третьей плоскости, перпендикулярной продольной оси вала, центральная часть соединена с второй торцевой частью двумя расположенными в третьей плоскости упругими перемычками в двух диаметрально противоположных положениях, развернутых на 90° относительно положения в третьей плоскости упругих перемычек, соединяющих первую торцевую часть с центральной частью, каждая из расположенных в первой, второй и третьей плоскостях упругих перемычек образована промежутком между двумя отверстиями, в центральном отверстии внутренней рамки первого узла однорамочного подвеса установлена цанга со штангой, в гироскопе выполнен упор, ротор двигателя имеет втулку и установленную на ней активную часть, вал выполнен с центральным отверстием по его продольной оси, узел ротора гироскопа имеет состоящий из внешней и внутренней частей маховик с устройствами балансировки, бескаркасные компенсационные катушки преобразователей момента с одной стороны закреплены по окружности на перпендикулярной продольной оси вала торцевой плоскости оправки, внутренняя полость гироскопа, заключенная между корпусом и двумя крышками, заполнена газовой средой, отличной от воздуха.
Однако такими гироскопами недостаточно решаются задачи миниатюризации конструкции, повышения точности измерения угловой скорости вследствие сложности и нестабильности устройств балансировки, нестабильности динамической настройки и возмущающих моментов при температурных воздействиях и во времени. Кроме того, при миниатюризации конструкции может произойти уменьшение диапазона измерения угловой скорости.
Техническим результатом изобретения является повышение точности измерения угловой скорости, повышение диапазона измерения угловой скорости, миниатюризация конструкции гироскопа.
Данный технический результат достигается в гироскопе, содержащем корпус, первую и вторую крышки на противоположных торцах корпуса, установленные в корпусе статор двухфазного гистерезисного двигателя, внешние кольца шарикоподшипников привода, неподвижные части первого и второго преобразователей положения, оправку с бескаркасными компенсационными катушками первого и второго преобразователей момента магнитоэлектрического типа, установленный во внутренних кольцах шарикоподшипников привода вал с ротором двигателя со стороны первой крышки и расположенным со стороны второй крышки узлом двухстепенного упругого подвеса, на котором расположен узел ротора гироскопа с постоянными магнитами преобразователей момента, причем узел двухстепенного упругого подвеса содержит первый узел однорамочного подвеса и второй узел однорамочного подвеса; первый узел однорамочного подвеса содержит подвижную часть, внутреннюю рамку и неподвижную (относительно вала) часть, внутренняя рамка соединена с подвижной частью двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в первой плоскости, неподвижная часть соединена с внутренней рамкой двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в перпендикулярной первой плоскости второй плоскости, второй узел однорамочного подвеса содержит первую и вторую торцевые части и расположенную между ними центральную часть, первая торцевая часть соединена с центральной частью двумя упругими перемычками, расположенными в двух диаметрально противоположных положениях относительно продольной оси вала в третьей плоскости, перпендикулярной продольной оси вала, центральная часть соединена с второй торцевой частью двумя расположенными в третьей плоскости упругими перемычками в двух диаметрально противоположных положениях, развернутых на 90° относительно положения в третьей плоскости упругих перемычек, соединяющих первую торцевую часть с центральной частью, каждая из расположенных в первой, второй и третьей плоскостях упругих перемычек образована промежутком между двумя отверстиями, в центральном отверстии внутренней рамки первого узла однорамочного подвеса установлена цанга со штангой, в гироскопе выполнен упор, ротор двигателя имеет втулку и установленную на ней активную часть, вал выполнен с центральным отверстием по его продольной оси, узел ротора гироскопа имеет состоящий из внешней и внутренней частей маховик с устройствами балансировки, бескаркасные компенсационные катушки преобразователей момента с одной стороны закреплены по окружности на перпендикулярной продольной оси вала торцевой плоскости оправки, внутренняя полость гироскопа, заключенная между корпусом и двумя крышками, заполнена газовой средой, отличной от воздуха, тем, что вал выполнен из первой части и расположенной напротив первой крышки второй части, сочлененных клеевым соединением по внутренней цилиндрической поверхности второй части и по внешней цилиндрической поверхности первой части вала на длине, большей половины длины каждой и первой, и второй частей вала, внутренние кольца шарикоподшипников привода установлены на второй части вала, в первой крышке установлена первая пробка, соосная с валом, в расположенном напротив первой крышки торце второй части вала установлена закрывающая герметично центральное отверстие вала вторая пробка, соосная с валом, в расположенном напротив первой крышки торце первой части вала образовано резьбовое отверстие, соосное с валом; перпендикулярная продольной оси вала плоскость симметрии активной части ротора двигателя смещена относительно плоскости симметрии активной части статора двигателя в сторону узла ротора гироскопа на расстояние 0,055-0,065 от длины активной части статора двигателя, а длина активной части ротора двигателя выполнена с отношением 1,1-1,2 к длине активной части статора двигателя, в расположенном со стороны первой крышки торце втулки ротора двигателя установлены отстоящие друг от друга на угловом расстоянии 45° восемь шпилек, каждая из которых выполнена из вольфрамоникелемедного сплава с плотностью не менее 17 г/см3, маховик выполнен из магнитомягкого железокобальтового сплава с индукцией насыщения не менее 2 Тл в слабом магнитном поле напряженностью не более 160 А/м; на внутренней части маховика установлены два постоянных магнита кольцевой формы, каждый из которых образован пятью или девятью сегментами из сплава с редкоземельным металлом Sm2Co5, намагниченными в радиальном направлении, каждый постоянный магнит закрыт колпаком, создающим герметичное пространство в зоне расположения постоянного магнита, каждый колпак содержит крышку из магнитомягкого железа и две стенки из немагнитной стали, крышка расположена на внешней цилиндрической поверхности постоянного магнита, а стенки расположены на перпендикулярных продольной оси вала противоположных торцах постоянного магнита; узел двухстепенного упругого подвеса выполнен из высокопрочного элинвара с модулем упругости первого рода не менее 1,67·109 Н/м2, температурным коэффициентом линейного расширения не более 5·10-61/°С, неподвижная часть первого узла однорамочного подвеса выполнена как первая часть вала, имеющая три участка, диаметр которых увеличивается последовательно от первого участка далее до второго и третьего участков, образующие упругие перемычки отверстия выполнены на глубину не менее 0,45 от диаметра отверстия при межцентровом расстоянии 1,02-1,03 от диаметра отверстия; внешний диаметр подвижной части первого узла однорамочного подвеса и диаметр третьего участка первой части вала выполнены равными внутреннему диаметру второго узла однорамочного подвеса, в первом узле однорамочного подвеса на его внешней поверхности выполнена проточка по области, включающей образующие упругие перемычки отверстия, по крайней мере на длине, включающей размер внутренней рамки в направлении продольной оси вала; на внешнем торце подвижной части первого узла однорамочного подвеса выполнены первая канавка полуцилиндрической формы, расположенная в диаметрально противоположном положении вторая канавка полуцилиндрической формы, продольные оси которых расположены в первой плоскости, на внешнем торце второй торцевой части второго узла однорамочного подвеса выполнены третья канавка полуцилиндрической формы и расположенная в диаметрально противоположном положении четвертая канавка полуцилиндрической формы, которые имеют идентичный профиль с профилем первой и второй канавок и продольные оси которых расположены в плоскости, проходящей через центры образующих упругие перемычки отверстий тех упругих перемычек, которые соединяют вторую торцевую часть второго узла однорамочного подвеса с его центральной частью; первый узел однорамочного подвеса и второй узел однорамочного подвеса соединены так, что продольные оси первой, второй, третьей и четвертой канавок совмещены, неподвижная часть первого узла однорамочного подвеса в части третьего участка первой части вала своей внешней поверхностью совмещена с внутренней поверхностью первой торцевой части второго узла однорамочного подвеса и по периметру их соединения выполнен сварной шов посредством лазерной сварки, втулка выполнена в виде цанги из бериллиевой бронзы БрБ2 с четырьмя пружинами в ее разрезной части, штанга выполнена единым элементом из вольфрамоникелемедного сплава с плотностью не менее 17 г/см3, со стороны второй крышки на длине, составляющей 0,1-0,15 длины штанги, штанга выполнена диаметром, составляющим около двух диаметров остальной части штанги, штанга установлена в цангу так, что ее сечение, расположенное на расстоянии 0,65-0,75 длины штанги со стороны первой крышки, совмещено с третьей плоскостью второго узла однорамочного подвеса, на длине неразрезной части цанги между внешней поверхностью неразрезной части цанги и внутренней поверхностью внутренней рамки первого узла однорамочного подвеса выполнено клеевое соединение, между внутренней цилиндрической поверхностью цанги и внешней цилиндрической поверхностью штанги в ее части с наименьшим диаметром выполнено клеевое соединение; на втором участке первой части вала установлен упор дисковой формы, между внешней цилиндрической поверхностью которого и внутренней цилиндрической поверхностью внутренней части маховика выполнен зазор, равный допустимому перемещению узла ротора гироскопа при его угловых перемещениях относительно осей изгиба упругих перемычек узла двухстепенного упругого подвеса; в оправке с компенсационными катушками выполнено окно, продольная ось которого расположена радиально к продольной оси вала в области середины первой части вала; упор на втором участке первой части вала установлен от узла ротора гироскопа в сторону первой крышки так, что его торец со стороны первой крышки выходит за ближайший торец маховика, и эта выходящая за пределы маховика часть упора расположена радиально напротив окна в оправке; устройства балансировки узла ротора гироскопа образованы на внешней цилиндрической поверхности внешней части маховика в виде выполненных заодно с внешней частью маховика первого, второго и третьего поясков, плоскости симметрии которых перпендикулярны продольной оси вала, плоскость симметрии первого пояска совмещена с третьей плоскостью, в которой расположены упругие перемычки второго узла однорамочного подвеса, второй и третий пояски расположены на торцах внешней части маховика симметрично относительно первого пояска, на каждом пояске образованы выполненные заодно с ними четыре выступа, расположенные через 90° по окружности поясков, диаметр поясков выполнен величиной 1,05-1,10 от внешнего диаметра внешней части маховика, ширина каждого пояска выполнена величиной 0,08-0,12 от размера внешней части маховика по направлению продольной оси вала, выступы выполнены с угловым распространением α1 до 25° и высотой до 0,015 от диаметра поясков; на выполненной в виде полого цилиндра оправке установлены четыре компенсационные катушки прямоугольной формы в плане, а в профиле дуговой формы, повторяющей профиль оправки, каждая компенсационная катушка выполнена с угловым распространением α2 от 75 до 85°, размер S1=Rα2 (где R - внешний радиус оправки) по дуге с углом α2 каждой компенсационной катушки выполнен в 2-2,3 раза больше ее размера S2 по направлению продольной оси вала; в качестве газовой среды использован водород при давлении от 4 до 20 мм рт.ст., обращенные в сторону внутренней полости гироскопа части корпуса, первой и второй крышек, а также статор и ротор двигателя, шарикоподшипники привода, вал, узел двухстепенного упругого подвеса, узел ротора гироскопа, ободок, каждый колпак с загерметизированным в нем постоянным магнитом, компенсационные катушки первого и второго преобразователей момента, неподвижные части первого и второго преобразователей положения выполнены предварительно наводороженными путем выдержки в среде водорода при давлении 450 мм рт.ст. в течение 210 ч в составе гироскопа; на корпусе гироскопа в области расположения двигателя установлены первый пленочный нагревательный элемент, на второй крышке установлен второй пленочный нагревательный элемент, соединенный последовательно с первым пленочным нагревательным элементом; на образованном на корпусе гироскопа фланце установлена плата с элементами мостовых схем первого и второго преобразователей положения, элементы платы закрыты слоем эластичного наполнителя.
В первом частном случае выполнения гироскопа каждая компенсационная катушка закреплена дополнительно еще с двух сторон в образованных на торцевой плоскости оправки выступах, охватывающих часть одной половины компенсационной катушки, в которой витки направлены параллельно торцевой плоскости оправки, выступы направлены в сторону второй половины компенсационной катушки с направлением витков параллельно торцевой плоскости оправки, выступы выполнены с конфигурацией, повторяющей конфигурацию охватываемой выступами части компенсационной катушки, между поверхностями обоймы и компенсационных катушек, контактирующих между собой, выполнены клеевые соединения.
Во втором частном случае в гироскопе сопротивление второго пленочного нагревательного элемента выполнено в два раза большим сопротивления первого пленочного нагревательного элемента.
В третьем частном случае в гироскопе высота упругих перемычек во втором узле однорамочного подвеса выполнена в два раза большей высоты упругих перемычек в первом узле однорамочного подвеса.
В четвертом частном случае по периметру соединения торца неразрезной части цанги с торцем внутренней рамки первого узла однорамочного подвеса выполнен сварной шов посредством лазерной сварки.
Посредством использования в качестве газовой среды водорода при давлении от 4 до 20 мм рт.ст., выполнения предварительно наводороженными в среде водорода при давлении 450 мм рт.ст. в течение 210 ч шарикоподшипников привода, вала, узла двухстепенного упругого подвеса, узла ротора гироскопа, ободка, каждого колпака с загерметизированным в нем постоянным магнитом, преобразователей момента и преобразователей положения, обращенных в сторону внутренней полости гироскопа частей корпуса, первой и второй крышек обеспечивается равновесное состояние газовой среды в гироскопе в течение календарного срока службы. В результате газовозмущающие моменты, действующие на узел ротора гироскопа, остаются неизменными, что приводит к стабильности дрейфа гироскопа, а следовательно, повышает точность гироскопа при работе в течение календарного срока службы.
Путем выполнения постоянных магнитов из сплава с редкоземельным металлом Sm2Co5 обеспечивается увеличение количества витков компенсационных катушек преобразователей момента вследствие возможности увеличения рабочего зазора в магнитной системе преобразователей момента по причине большей магнитной энергии таких постоянных магнитов по сравнению с обычными постоянными магнитами. Поэтому увеличивается диапазон измерения угловой скорости вследствие увеличения моментов, создаваемых преобразователями момента.
При выполнении постоянных магнитов загерметизированными посредством колпаков сохраняется целостность постоянных магнитов из сплава с редкоземельным металлом Sm2Co5 и создаваемый ими магнитный поток вследствие их изоляции от разрушающей среды водорода, в результате чего повышается точность гироскопа.
Посредством выполнения колпаков в составе крышки из магнитомягкого железа и стенок из немагнитной стали увеличивается диапазон измерения угловой скорости вследствие повышения развиваемого преобразователями момента моментов, вызванного увеличением магнитного потока в рабочем зазоре преобразователей момента.
При выполнении компенсационных катушек преобразователей момента прямоугольными в плане с угловым распространением 75-85° и отношением 2-2,3 их длины к ширине увеличивается активная доля витков, находящихся в магнитном поле постоянных магнитов, в результате чего происходит увеличение создаваемых преобразователями момента моментов, и увеличивается диапазон измерения угловой скорости.
Посредством установки в образованные на торцевой плоскости оправки выступы компенсационных катушек, охватываемых дополнительно с двух сторон данными выступами, повторяющими конфигурацию компенсационных катушек, обеспечивается более точное расположение компенсационных катушек по окружности на торцевой плоскости оправки, чем достигаются более точная ориентация компенсационных катушек относительно измерительных осей гироскопа и стабилизация их положения при температурных воздействиях. В результате повышается точность измерений гироскопа за счет устранения поперечных связей между измерительными осями гироскопа ввиду уменьшения погрешности выполнения расположения измерительных осей гироскопа.
При выполнении межцентрового расстояния между образующими упругие перемычки в узле двухстепенного упругого подвеса отверстиями в соотношении 1,02-1,03 к диаметру отверстий, а высоты упругих перемычек в соотношении не менее 0,45 к диаметру отверстий обеспечивается повышение точности гироскопа вследствие минимизации перекрестных связей между измерительными осями гироскопа, достигаемой выполнением жесткости упругого подвеса вдоль осей изгиба упругих перемычек по крайней мере на три порядка большей жесткости упругого подвеса относительно осей изгиба упругих перемычек.
Кроме того, уменьшаются габариты узла ротора гироскопа вследствие возможности динамической настройки гироскопа при оптимальной скорости вращения двигателя, обеспечивающей прочность узла ротора гироскопа.
Путем выполнения в узле двухстепенного упругого подвеса первой и второй канавок на первом узле однорамочного подвеса, третьей и четвертой канавок на втором узле однорамочного подвеса, совмещения первой канавки с третьей канавкой, а второй канавки с четвертой канавкой обеспечивается равножесткость двухстепенного упругого подвеса вследствие того, что упругие перемычки располагаются попарно точно в двух взаимно перпендикулярных плоскостях. В результате повышается точность измерения угловой скорости вследствие минимизации погрешности от квадрата линейного ускорения.
При выполнении узла двухстепенного упругого подвеса из высокопрочного элинвара с высоким модулем упругости первого рода достигается миниатюризация габаритов узла двухстепенного упругого подвеса при обеспечении заданной жесткости упругих перемычек.
Путем выполнения узла двухстепенного упругого подвеса из высокопрочного элинвара с малым температурным коэффициентом линейного расширения обеспечивается повышение точности гироскопа за счет стабильности динамической настройки гироскопа в широком диапазоне рабочих температур окружающей среды.
При выполнении маховика узла ротора гироскопа из железокобальтового сплава с высокой индукцией насыщения в слабых магнитных полях обеспечивается увеличение диапазона измерений угловых скоростей вследствие увеличения моментов, создаваемых преобразователями момента, так как достигается повышение магнитной индукции в рабочем зазоре преобразователей момента.
Посредством выполнения двух постоянных магнитов из сегментов из сплава редкоземельного металла Sm2Co5, маховика узла ротора гироскопа из магнитомягкого железокобальтового сплава с высокой индукцией насыщения в слабых магнитных полях, отношения 2-2,3 длины к ширине компенсационных катушек обеспечивается миниатюризация габаритов преобразователей момента вследствие достижения высокой магнитной индукции в рабочем зазоре преобразователей момента и увеличения активной доли витков компенсационных катушек.
Выполнением окна в обойме с компенсационными катушками в области середины первой части вала, расположением упора на втором участке первой части вала, выполнением упора выходящим за торец маховика напротив окна обеспечивается повышение точности измерения угловой скорости вследствие более точного совмещения центра масс узла ротора гироскопа с продольной осью вала, достигаемого поступательным перемещением первой части вала относительно второй части вала в направлении, перпендикулярном продольной оси вала.
При зазоре между упором и маховиком, составляющим допустимое угловое перемещение узла ротора гироскопа, обеспечиваются целостность упругих перемычек, стабильность динамической настройки гироскопа. В результате повышается точность измерения угловой скорости.
Путем выполнения поясков с выступами заодно с внешней частью маховика обеспечивается повышение точности гироскопа вследствие повышения стабильности балансировки, вызванной отсутствием перемещаемых масс, а также повышение стабильности кинетического момента узла ротора гироскопа вследствие увеличения прочности узла ротора гироскопа.
При выполнении на внешней части маховика узла ротора гироскопа поясков с выступами, соотношение между размерами которых обеспечивает балансировку узла ротора гироскопа, достигается повышение точности балансировки и точности гироскопа, так как производится удаление дозированного количества массы с выступов в точно известных по расчету местах на выступах на строго фиксированном расстоянии удаляемого количества массы от продольной оси вала.
Выполнением ободков с поясками с определенным соотношением между их размерами достигаются миниатюризация габаритов узла ротора гироскопа, а также повышение точности измерения угловой скорости, так как обеспечивается возможность балансировки посредством лазера, при которой образуется минимальное количество дисперсного металла, что позволяет уменьшить вероятность загрязнения упругих перемычек и, следовательно, сохранить динамическую настройку гироскопа.
Уменьшение размеров преобразователей момента, узла ротора гироскопа, узла двухстепенного упругого подвеса обеспечивает миниатюризацию габаритов гироскопа.
Путем выполнения штанги единым элементом из вольфрамоникелемедного сплава с высокой плотностью достигается миниатюризация габаритов узла двухстепенного упругого подвеса, так как для балансировки узла ротора гироскопа в этом случае достаточны минимальные размеры штанги.
При выполнении штанги из материала с высокой плотностью с определенными соотношениями между размерами штанги и ее частей, определенным положением штанги относительно осей изгиба упругих перемычек обеспечивается точное выполнение соотношения между осевыми и полярными моментами внутренней рамки и центральной части второго узла однорамочного подвеса. В результате повышается точность измерения угловой скорости вследствие обеспечения точности динамической настройки гироскопа.
Выполнением цанги из бериллиевой бронзы, а штанги из вольфрамоникелемедного сплава достигается повышение точности измерения угловой скорости, так как вследствие близости температурных коэффициентов линейного расширения бериллиевой бронзы и вольфрамоникелемедного сплава сохраняется динамическая настройка гироскопа в широком диапазоне рабочих температур окружающей среды.
Путем выполнения в разрезной части цанги четырех пружин обеспечивается центрирование штанги, в результате чего ее центр масс занимает стабильное положение, обеспечивая стабильность дрейфа гироскопа, чем достигается повышение точности измерения угловой скорости.
Посредством выполнения лазерной сваркой сварного шва по периметру соединения торца неразрезной части цанги с торцем внутренней рамки первого узла однорамочного подвеса, выполнения клеевого соединения между внутренней поверхностью внутренней рамки первого узла однорамочного подвеса и внешней поверхностью неразрезной части цанги на длине неразрезной части цанги обспечивается такое соединение установленной в цанге штанги с внутренней рамкой первого однорамочного подвеса, при котором клеевое соединение при температурных воздействиях создает свободу радиального перемещения штанги, а сварное соединение ограничивает радиальное перемещение и устраняет продольное перемещение. В результате температурные деформации в гироскопе имеют стабильный характер, повышаются стабильность дрейфа гироскопа и его точность.
Посредством расположения узла двухстепенного упругого подвеса на первой части вала, образования соосно с валом первой пробки в первой крышке, расположенной с торцевой части двигателя, установки второй пробки соосно с валом в центральное отверстие второй части вала, расположенной напротив первой крышки, обеспечивается такой путь прохода воздуха во время технологического процесса обезгаживания гироскопа, при котором воздух не проходит через центральное отверстие вала к упругим перемычкам узла двухстепенного упругого подвеса.
В результате на упругих перемычках не осаждаются содержащиеся в воздухе примеси, их деформация при изменении угловой скорости остается стабильной. Поэтому стабильной становится случайная составляющая скорости дрейфа гироскопа и повышается точность измерения угловой скорости.
При выполнении вала состоящим из двух частей и сочленения их посредством клеевого соединения при балансировке узла ротора гироскопа обеспечиваются перемещение второй части вала относительно первой части в радиальном направлении и фиксация второй части вала в таком положении, в котором статические моменты узла ротора гироскопа минимальны. В результате повышается точность гироскопа.
При выполнении длины активной части ротора двигателя с отношением 1,1-1,2 к длине активной части статора двигателя, смещении плоскости симметрии активной части ротора двигателя относительно плоскости симметрии активной части статора двигателя на расстояние 0,055-0,065 от длины активной части статора двигателя повышается точность измерения угловой скорости вследствие обеспечения динамической балансировки ротора двигателя с шарикоподшипниками привода.
Посредством выполнения сопротивления второго пленочного нагревательного элемента в два раза большим сопротивления первого пленочного нагревательного элемента обеспечивается повышение точности измерения угловой скорости вследствие более точного поддержания температуры гироскопа путем перераспределения тепловых потоков от двигателя и первого, и второго пленочных нагревательных элементов.
Путем выполнения шпилек в торце втулки ротора двигателя из сплава с высокой плотностью достигается миниатюризация двигателя гироскопа вследствие обеспечения балансировки ротора двигателя устройствами балансировки малых размеров и их небольшими перемещениями.
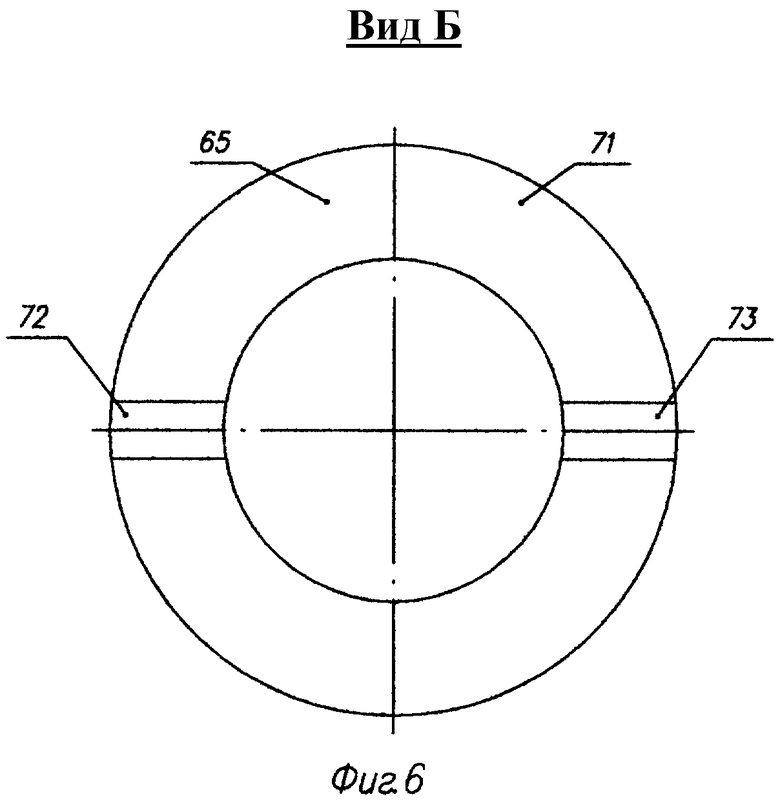
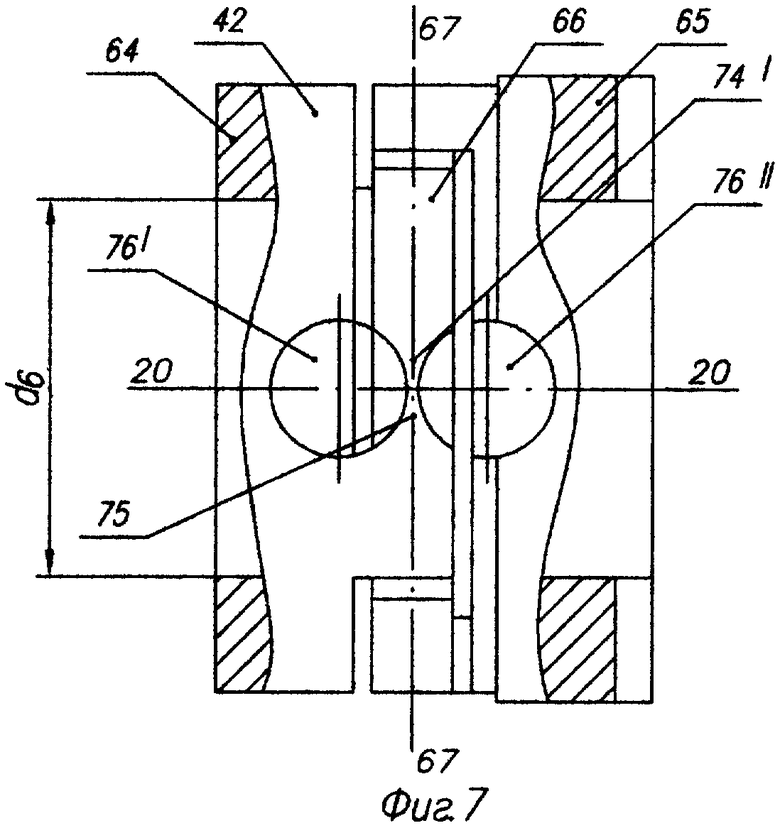
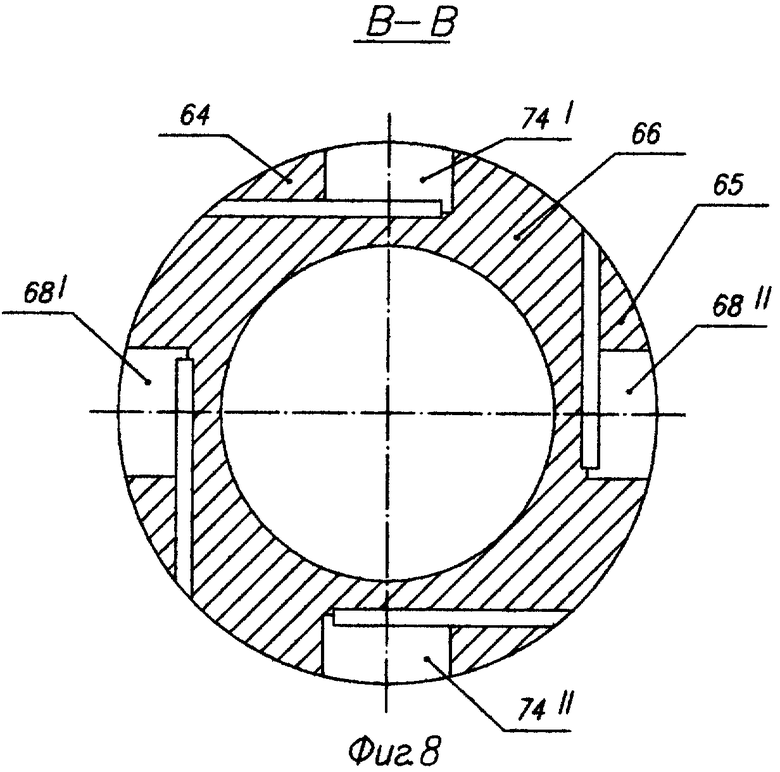
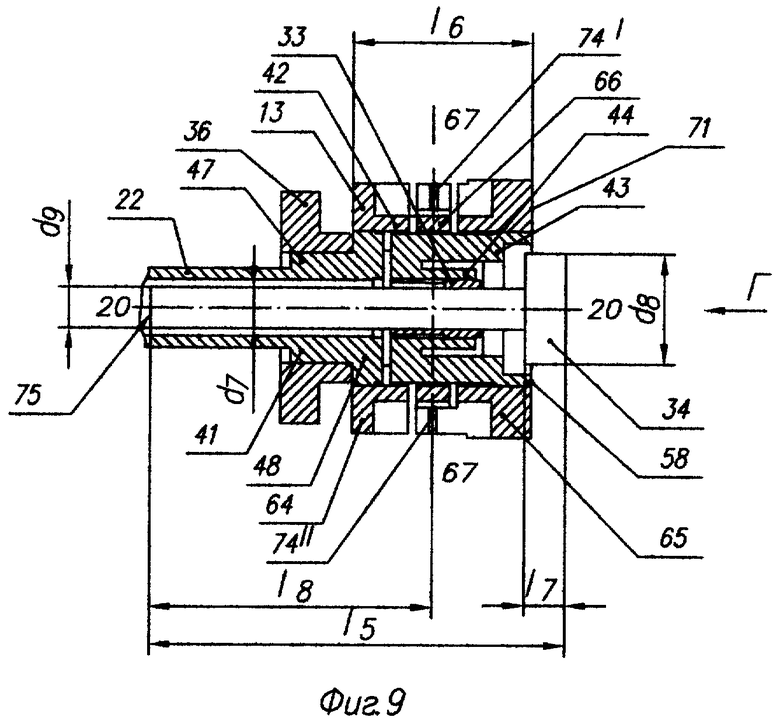
На фиг.1 представлен общий вид гироскопа, на фиг.2 - фронтальный вид первого узла однорамочного подвеса, на фиг.3 - вид по А фиг.2 первого узла однорамочного подвеса, на фиг.4 - горизонтальный вид первого узла однорамочного подвеса, на фиг.5 - фронтальный вид второго узла однорамочного подвеса, на фиг.6 - вид по Б фиг.5 второго узла однорамочного подвеса, на фиг.7 - горизонтальный вид второго узла однорамочного подвеса, на фиг.8 - разрез по В-В фиг.5 второго узла однорамочного подвеса, на фиг.9 - фронтальный вид узла двухстепенного упругого подвеса, на фиг.10 - вид по Г фиг.9 узла двухстепенного упругого подвеса, на фиг.11 - профильный вид узла двухстепенного упругого подвеса, на фиг.12 - вид цанги, на фиг.13 - вид внутренней рамки первого узла однорамочного подвеса с цангой, на фиг.14 - вид внешней части маховика узла ротора гироскопа, на фиг.15 - разрез по Д-Д фиг.14 внешней части маховика, на фиг.16 - вид ротора двигателя, на фиг.17 - вид ободка с компенсационными катушками, на фиг.18 - вид компенсационной катушки, на фиг.19 - развертка ободка с выступами, на фиг.20 - развертка ободка с выступами и компенсационными катушками, на фиг.21 - вид корпуса с неподвижными частями преобразователей положения, на фиг.22 - вид постоянного магнита, на фиг.23 - электрическая схема гироскопа.
В корпусе 1 гироскопа (фиг.1) с расположенными на противоположных его торцах первой крышкой 2 и второй крышкой 3 установлены статор 4 двухфазного гистерезисного двигателя, внешние кольца 5', 5" шарикоподшипников 6', 6" привода, неподвижные части 7', 7" первого преобразователя положения, оправка 8 с бескаркасными компенсационными катушками 9', 9" первого преобразователя момента магнитоэлектрического типа. На внутренних кольцах 10', 10" шарикоподшипников 6', 6" привода установлен вал 11, на котором со стороны первой крышки 2 расположен ротор 12 двигателя, а со стороны второй крышки 3 закреплен узел 13 двухстепенного упругого подвеса, на котором расположен узел ротора 14 гироскопа с постоянными магнитами 15', 15" первого и второго преобразователей момента.
В роторе 12 двигателя выполнены активная часть 16 и втулка 17, в торце 18 которой со стороны первой крышки 2 установлены шпильки 19', 19", выполненные из вольфрамоникелемедного сплава с высокой плотностью (не менее 17 г/см3). В качестве такого материала может быть использован сплав марки ВНМ-5. Всего по торцу 18 установлены восемь шпилек, расположенных через 45° друг от друга.
По продольной оси 20-20 вала 11 выполнено центральное отверстие 21. Вал 11 содержит первую часть 22 и вторую часть 23, которые сочленены клеевым соединением 24 на длине l1 по внутренней цилиндрической поверхности второй части 23 вала 11 и по внешней цилиндрической поверхности первой части 22 вала 11. Длина l1 с клеевым соединением выполнена большей половины длины каждой первой части 22 и второй части 23 вала 11.
Внутренние кольца 10', 10" шарикоподшипников 6', 6" привода установлены на второй части 23 вала 11.
В оправке 8 образовано окно 25, продольная ось которого расположена радиально к продольной оси 20-20 вала 11 в районе середины первой части 22 вала 11.
В расположенном напротив первой крышки 2 торце первой части 22 вала 11 образовано резьбовое отверстие 26, соосное с валом 11. В первой крышке 2 установлена первая пробка 27, соосная с валом 11. В расположенном напротив первой крышки 2 торце второй части 23 вала 11 установлена вторая пробка 28, соосная с валом 11. Вторая пробка 28 герметично закрывает центральное отверстие 21 вала 11. Маховик 29 узла ротора 14 гироскопа выполнен из соединенных вместе внутренней части 30 и внешней части 31 из магнитомягкого железокобальтового сплава, который обеспечивает индукцию насыщения не менее 2 Тл в слабом магнитном поле не более 160 А/м. В качестве такого материала может быть использована сталь марки 49КФ.
Каждый из установленных на внутренней части 30 маховика 29 постоянных магнитов 15', 15" выполнен как кольцевой. При этом кольцевая форма постоянных магнитов 15', 15" образована пятью или девятью сегментами из сплава с редкоземельным металлом Sm2Co5, намагниченными в радиальном направлении относительно продольной оси 20-20 вала 11 так, что к компенсационным катушкам 9', 9" постоянные магниты 15', 15" обращены разноименными полюсами. Постоянные магниты 15', 15" закрыты соответственно колпаками 32', 32" так, что в зоне расположения каждого из постоянных магнитов 15', 15" создано герметичное пространство.
В узле 13 двухстепенного упругого подвеса установлена цанга 33 из бериллиевой бронзы БрБ2, в которой закреплена штанга 34, выполненная единым элементом из вольфрамоникелемедного сплава с высокой плотностью (не менее 17 г/см3), например, сплава марки ВНМ-5.
На неподвижной относительно вала 11 части 35 узла ротора 14 гироскопа установлен упор 36, у которого между его внешней цилиндрической поверхностью и внутренней цилиндрической поверхностью внутренней части 30 маховика 29 образован зазор δ1, составляющий допустимое перемещение узла ротора 14 гироскопа при его угловых перемещениях. Упор 36 установлен от узла ротора 14 гироскопа в сторону первой крышки 2 так, что его торец со стороны первой крышки 2 выходит за ближайший торец маховика 29, и эта выходящая за пределы маховика 29 часть упора 36 расположена радиально напротив окна 25 в оправке 8.
На корпусе 1 в области расположения двигателя установлен первый пленочный нагревательный элемент 37', а на второй крышке 3 - второй пленочный нагревательный элемент 37", соединенный последовательно с первым пленочным нагревательным элементом 37'.
В предпочтительном варианте сопротивление второго пленочного нагревательного элемента 37" выполнено в два раза большим сопротивления первого пленочного нагревательного элемента 37'.
В корпусе 1 выполнен фланец 38, на котором установлена плата 39 с элементами мостовых схем первого и второго преобразователей положения, закрытыми слоями 40', 40" эластичного наполнителя, например, типа "Виксинт".
Узел 13 двухстепенного упругого подвеса выполнен из высокопрочного элинвара, у которого модуль упругости первого рода составляет не менее 1,67·109 Н/м2, температурный коэффициент линейного расширения не превышает 5·10-6 1/°С. Узел 13 двухстепенного упругого подвеса содержит первый узел 41 однорамочного подвеса и второй узел 42 однорамочного подвеса.
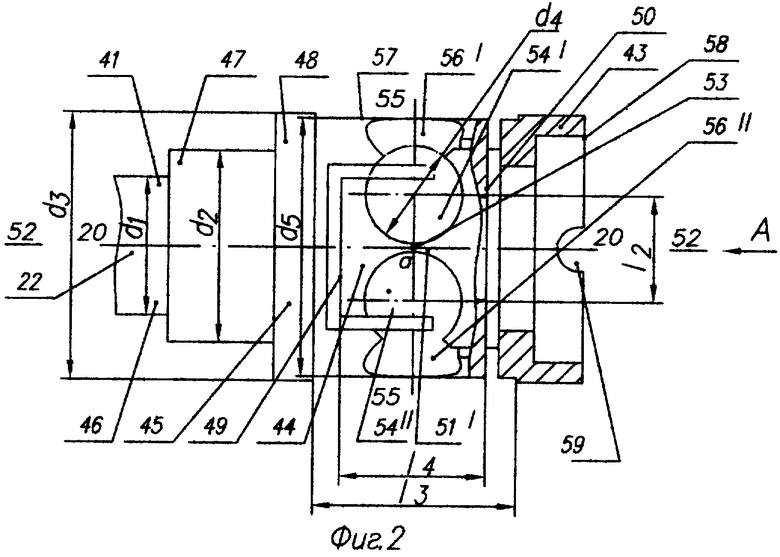
Первый узел 41 однорамочного подвеса (фиг.2) содержит подвижную часть 43, внутреннюю рамку 44 и неподвижную часть 45, являющуюся первой частью 22 вала 11 и выполненную из первого участка 46 диаметром d1, второго участка 47 диаметром d2 и третьего участка 48 диаметром d3, причем d1<d2<d3.
Торец 49 внутренней рамки 44 отделен от неподвижной части 45, а торец 50 отделен от подвижной части 43. Внутренняя рамка 44 со стороны торца 49 соединена с подвижной частью 43 перемычкой 51', расположенной в первой плоскости 52-52, в которой расположена продольная ось 20-20 вала 11. Упругая перемычка 51' образована промежутком 53 между отверстиями 54', 54", диаметром d4 каждое отверстие.
Расстояние l2 является межцентровым расстоянием между отверстиями 54', 54", при этом l2=(1,02-1,03)d4.
Ось изгиба упругой перемычки 51' расположена на промежутке 53 в точке "а", лежащей на соединяющей оси отверстий 54', 54" прямой 55-55.
Первая часть 22 вала 11 на третьем участке 48 соединена с внутренней рамкой 44 со стороны ее торца 50 упругими перемычками 56', 56", расположенными в двух диаметрально противоположных положениях относительно продольной оси 20-20 вала 11 во второй плоскости, перпендикулярной первой плоскости 52-52.
На внешней поверхности 57 первого узла 41 однорамочного подвеса выполнена проточка диаметром d5<d3 на длине l3, большей длины l4 внутренней рамки 44, в области, включающей упругие перемычки 51', 56', 56". На внешнем торце 58 подвижной части 43 выполнена первая канавка 59 полуцилиндрической формы.
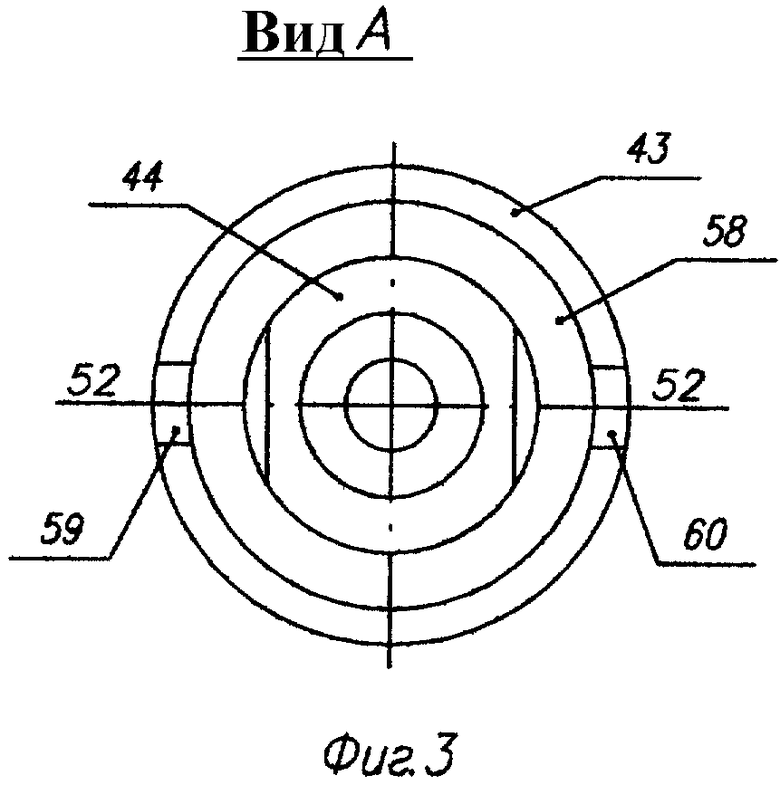
На внешнем торце 58 (фиг.3) подвижной части 43 первого узла 41 однорамочного подвеса выполнена вторая канавка 60 полуцилиндрической формы, расположенная в диаметрально противоположном положении относительно первой канавки 59. Продольные оси первой канавки 59 и второй канавки 60 расположены в первой плоскости 52-52.
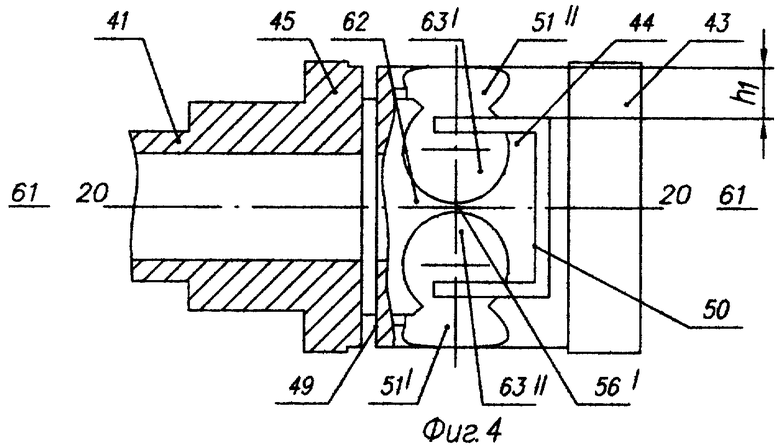
Выполненная аналогично упругой перемычке 51' (фиг.4) упругая перемычка 51" расположена диаметрально противоположно относительно упругой перемычки 51' и соединяет подвижную часть 43 первого узла 41 однорамочного подвеса с внутренней рамкой 44 со стороны ее торца 49.
Расположенная во второй плоскости 61-61 упругая перемычка 56' образована промежутком 62 между отверстиями 63', 63". Аналогично выполнена упругая перемычка 56".
Высота h1 упругих перемычек выполнена одинаковой для всех упругих перемычек 51', 51", 56', 56" и составляет глубину отверстий 54', 54", 63', 63". При этом h1≥0,45d4.
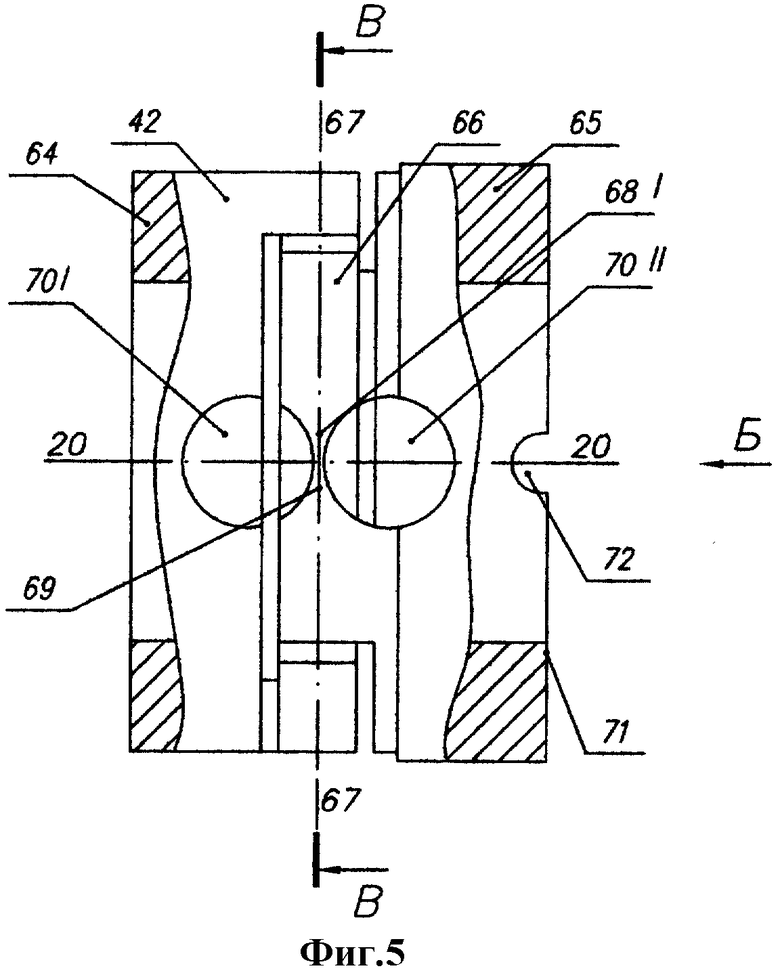
Второй узел 42 однорамочного подвеса (фиг.5) содержит первую торцевую часть 64, вторую торцевую часть 65 и расположенную между ними центральную часть 66. В перпендикулярной продольной оси 20-20 вала 11 третьей плоскости 67-67 выполнена упругая перемычка 68', образованная промежутком 69 между отверстиями 70', 70".
Упругая перемычка 68' соединяет вторую торцевую часть 65 с центральной частью 66.
На торце 71 второй торцевой части 65 выполнена третья канавка 72 полуцилиндрической формы.
На торце 71 (фиг.6) второй торцевой части 65 выполнена четвертая канавка 73, расположенная в диаметрально противоположном положении по сравнению с третьей канавкой 72.
Первая канавка 59, вторая канавка 60 первого узла 41 однорамочного подвеса, третья канавка 72, четвертая канавка 73 второго узла 42 однорамочного подвеса выполнены с идентичными профилями.
Во втором узле 42 (фиг.7) однорамочного подвеса выполнена упругая перемычка 74', образованная промежутком 75 между отверстиями 76', 76" и соединяющая первую торцевую часть 64 с центральной частью 66.
Внутренний диаметр d6 второго узла 42 однорамочного подвеса выполнен равным внешнему диаметру d3 третьего участка 48 первой части 22 вала 11.
Расположенная диаметрально противоположно относительно упругой перемычки 68' (фиг.8) упругая перемычка 68" соединяет центральную часть 66 с второй торцевой частью 65 второго узла 42 однорамочного подвеса.
Расположенная диаметрально противоположно относительно упругой перемычки 74' упругая перемычка 74" соединяет центральную часть 66 с первой торцевой частью 64 второго узла 42 однорамочного подвеса.
Упругие перемычки 68', 68" в третьей плоскости 67-67 развернуты на 90° относительно упругих перемычек 74', 74".
Упругие перемычки 51', 51", 56', 56", 68', 68", 74', 74" выполнены идентичными (диаметры отверстий d4, межцентровое расстояние l2, глубина h1≥0,45d4), и их оси изгиба расположены в третьей плоскости 67-67.
В частном случае высота перемычек 68', 68", 74', 74" во втором узле 42 однорамочного подвеса в два раза больше высоты перемычек 51', 51", 56', 56" первого узла 41 однорамочного подвеса.
Первый узел 41 однорамочного подвеса (фиг.9) и второй узел 42 однорамочного подвеса соединены так, что внешняя поверхность диаметром d3 третьего участка 48 первой части 22 вала 11 совмещена с внутренней поверхностью диаметром d6 первой торцевой части 64 второго узла 42 однорамочного подвеса, внешняя поверхность диаметром d3 подвижной части 43 первого узла 41 однорамочного подвеса совмещена с внутренней поверхностью диаметром d6 второй торцевой части 65 второго узла 42 однорамочного подвеса, торец 58 первого узла 41 однорамочного подвеса совмещен с торцом 71 второй торцевой части 65 второго узла 42 однорамочного подвеса.
Цанга 33 установлена в центральном отверстии диаметром d7 внутренней рамки 44 первого узла 41 однорамочного подвеса.
Штанга 34 выполнена длиной l5, большей длины l6 маховика 29 узла ротора 14 гироскопа.
На длине l7 вдоль оси 20-20 вала 11, составляющей 0,1-0,15 длины l5 штанги 34, штанга 34 выполнена диаметром d8, составляющим около двух диаметров d9 остальной части штанги 34.
Штанга 34 установлена в цанге 33 так, что ее сечение, расположенное в третьей плоскости 67-67, отстоит от находящегося напротив первой крышки 2 торца 75 на расстояние l8, составляющем 0,65-0,75 длины l5 штанги 34.
Упор 36 установлен на втором участке 47 первой части 22 вала 11.
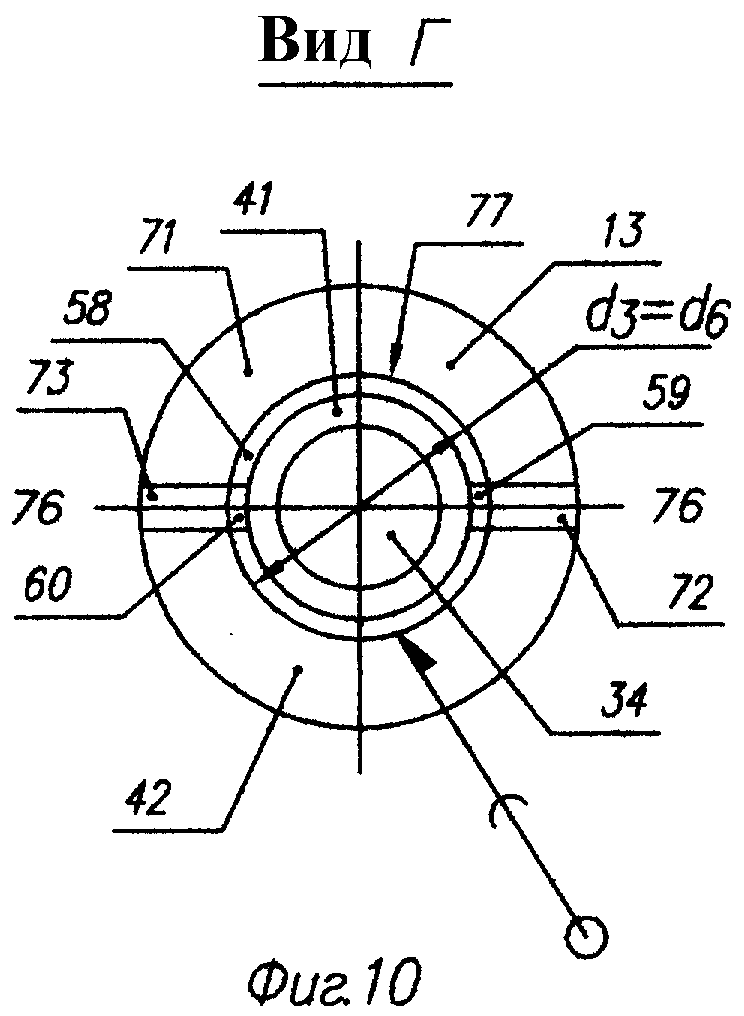
В узле 13 двухстепенного упругого подвеса (фиг.10) первая канавка 59 и вторая канавка 60 первого узла 41 однорамочного подвеса совмещены с третьей канавкой 72 и четвертой канавкой 73 второго узла 42 однорамочного подвеса так, что продольные оси первой канавки 59, второй канавки 60, третьей канавки 72 и четвертой канавки 73 расположены на прямой линии 76-76.
По периметру 77 совмещенных по диаметру d3 внешней поверхности первого узла 41 однорамочного подвеса и диаметру d6 внутренней поверхности второго узла 42 однорамочного подвеса торцов 58 и 71 посредством лазерной сварки выполнен сварной шов.
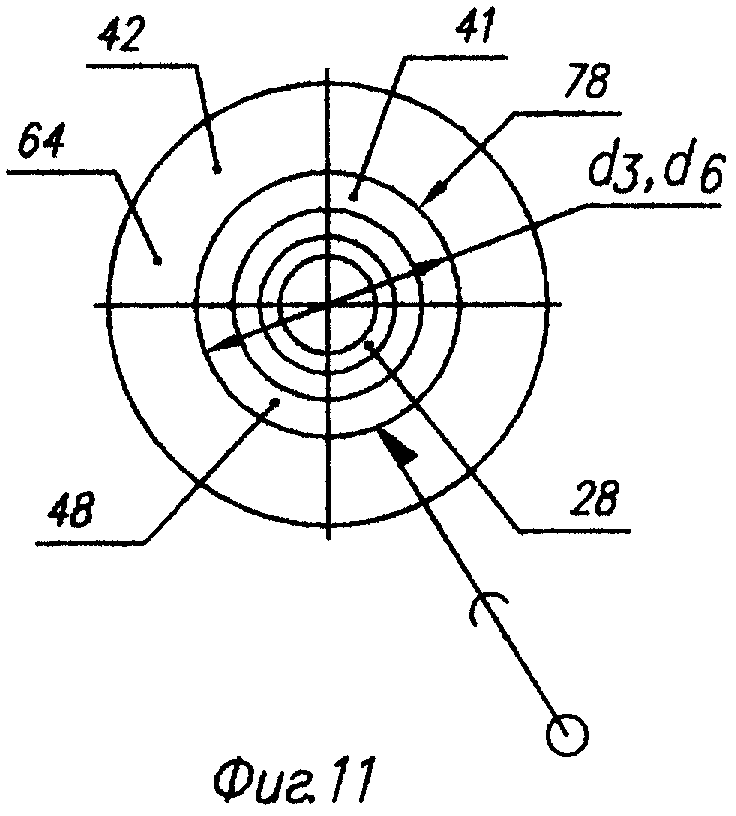
По периметру 78 (фиг.11) совмещения по диаметру d3 внешней поверхности третьего участка 48 первой части 22 вала 11 и диаметру d6 внутренней поверхности первой торцевой части 64 посредством лазерной сварки выполнен сварной шов.
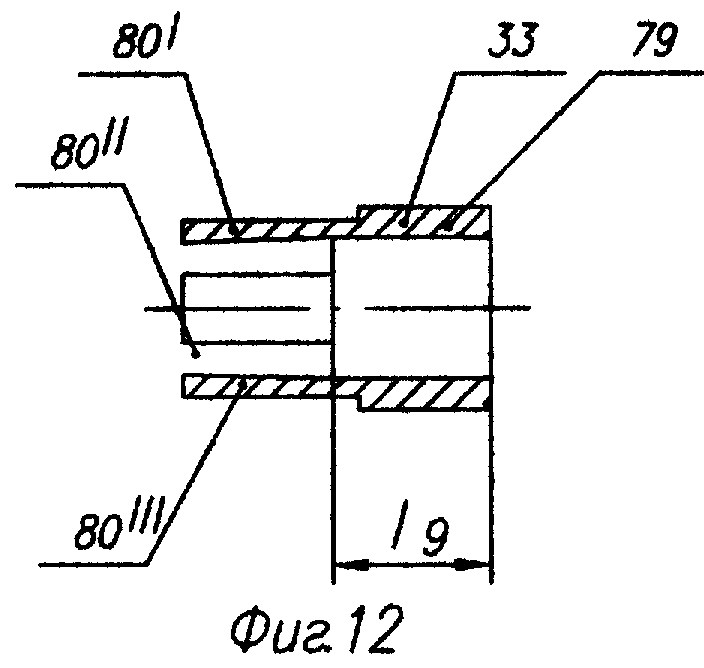
Цанга 33 (фиг.12) содержит неразрезную часть 79 на длине l9 и четыре пружины 80', 80", 80"' (пружина 80IV на чертеже не показана) в ее разрезной части.
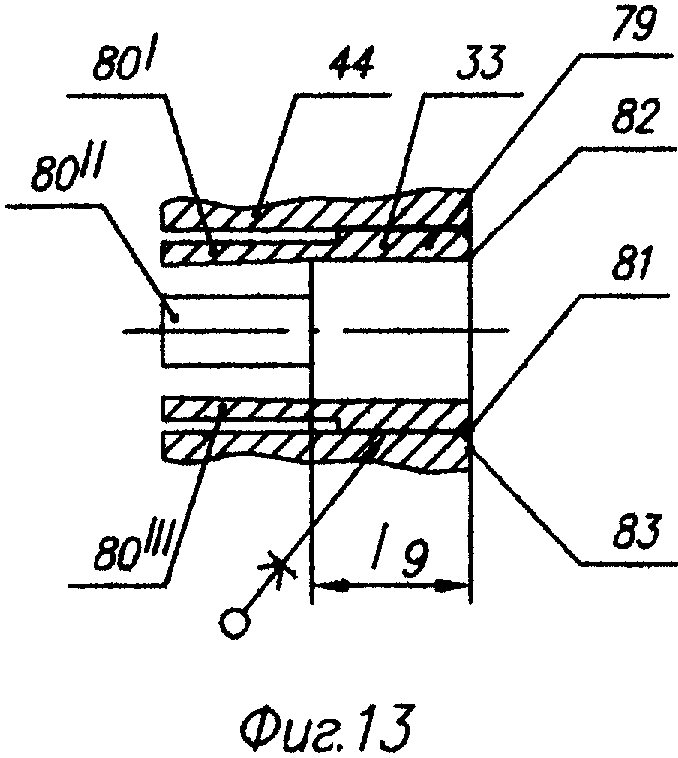
По периметру 81 (фиг.13) соединения торца 82 неразрезной части 79 цанги 33 с торцом 83 внутренней рамки 44 первого узла 41 однорамочного подвеса может быть выполнен сварной шов посредством лазерной сварки.
На длине l9 неразрезной части 79 цанги 33 между внешней поверхностью неразрезной части 79 и внутренней поверхностью внутренней рамки 44 первого узла 41 однорамочного подвеса выполнено клеевое соединение.
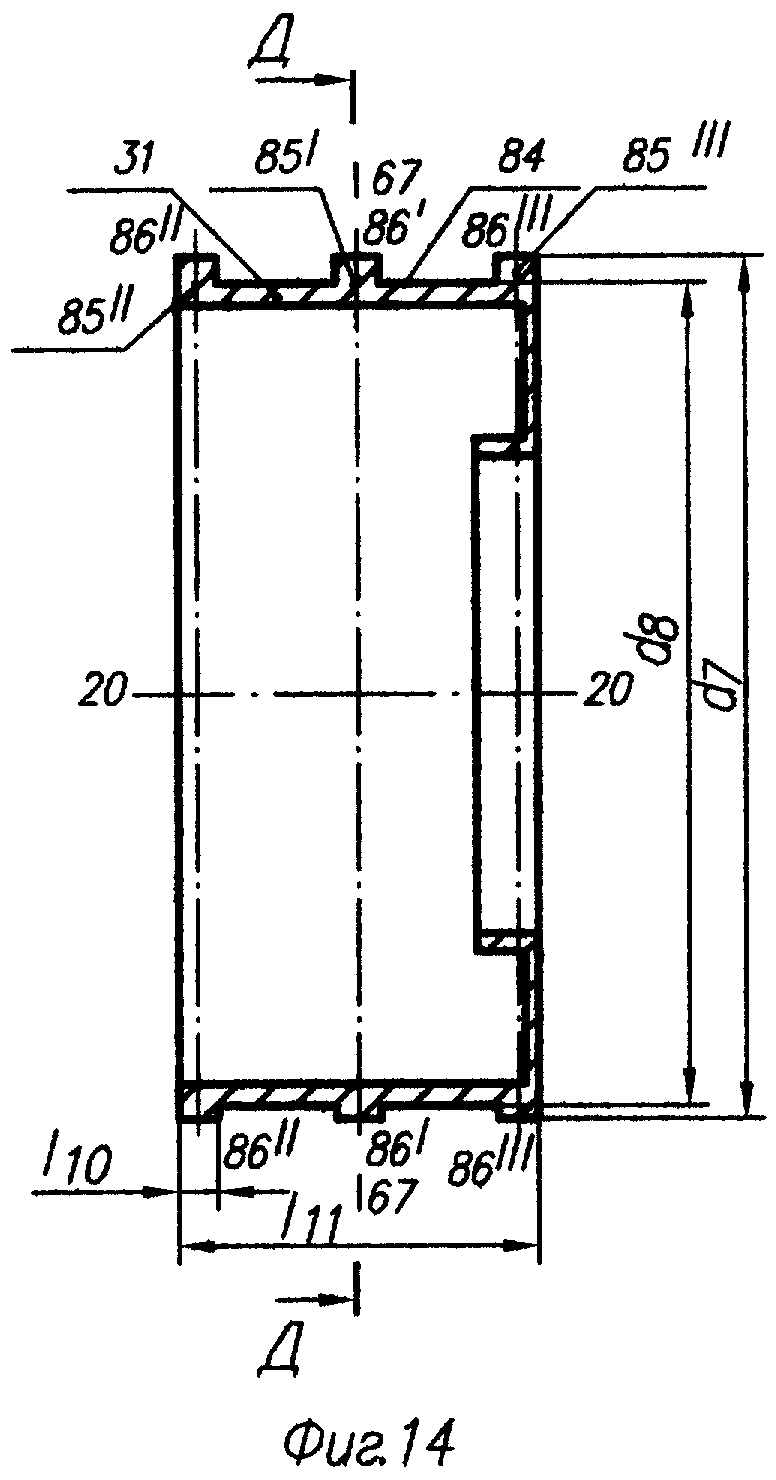
На внешней цилиндрической поверхности 84 (фиг.14) внешней части 31 маховика 29 образованы выполненные заодно с внешней частью 31 первый 85', второй 85" и третий 85"' пояски, плоскости симметрии которых соответственно 86'-86', 86"-86" и 86"'-86"' перпендикулярны продольной оси 20-20 вала 11. Плоскость симметрии 86'-86' первого пояска 85' расположена в третьей плоскости 67-67, а второй поясок 85" и третий поясок 85"' расположены на торцах внешней части 31 маховика 29 симметрично относительно первого пояска 85'.
Диаметр d7 поясков 85', 85", 85"' составляет 1,05-1,10 от внешнего диаметра d8 внешней части 31 маховика 29.
Ширина l10 каждого из поясков 85', 85", 85"' выполнена величиной 0,08-0,12 от размера l11 внешней части 31 маховика 29 по продольной оси 20-20 вала 11.
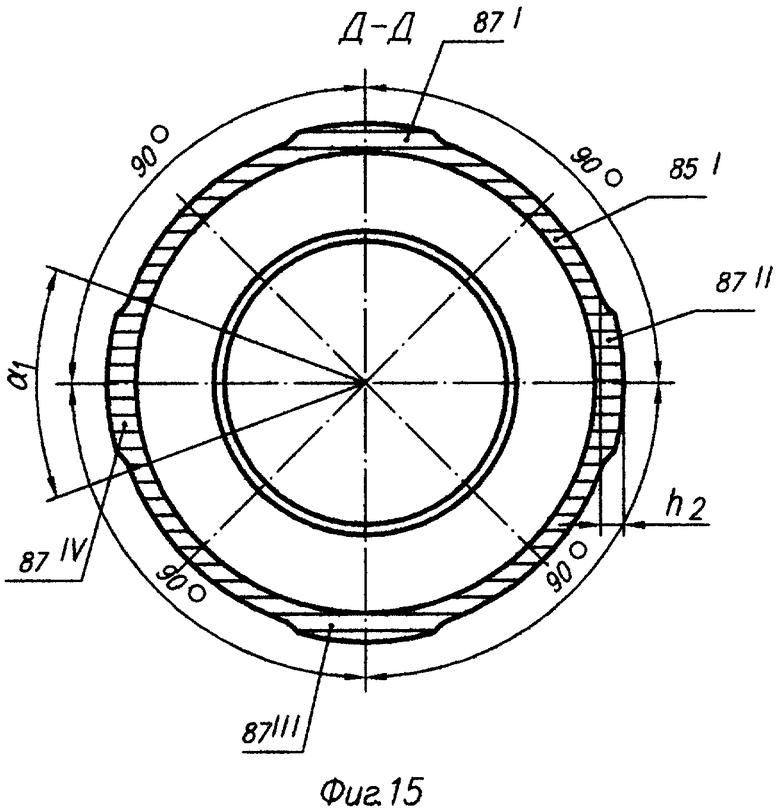
На первом пояске 85' (фиг.15) образованы выполненные заодно с ним выступы 87', 87", 87"', 87IV, расположенные через 90° по окружности. Каждый из выступов 87', 87", 87"', 87IV выполнен с угловым расположением α1, составляющим до 25°, и высотой h2 от пояска 85', составляющей до 0,015 от диаметра d7 поясков 85', 85", 85"'.
В таком же порядке расположения, как выступы 87', 87", 87"', 87IV на пояске 85', аналогичные выступы 87V, 87VI, 87VII, 87VIII выполнены на втором пояске 85", а выступы 87IX, 87Х, 87XI, 87XII - на третьем пояске 85"'.
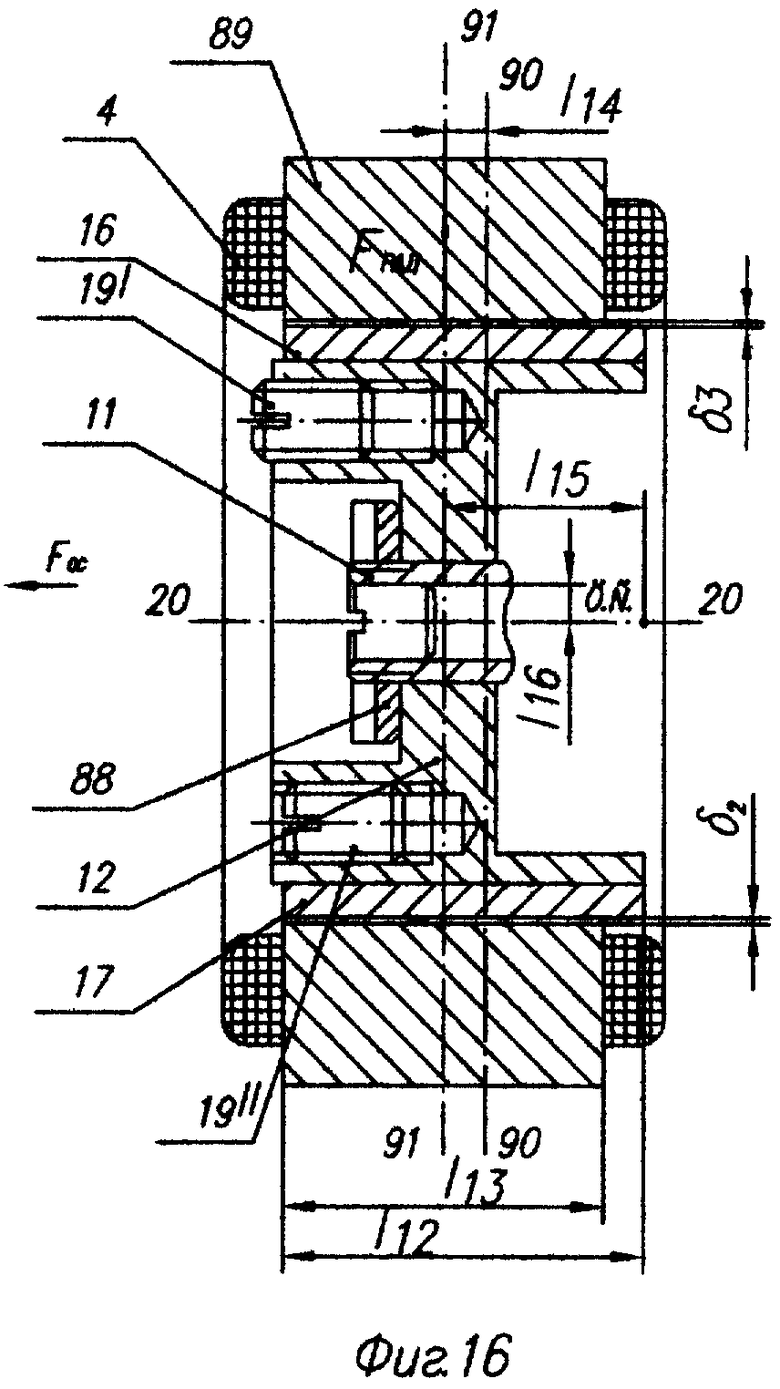
Ротор 12 двигателя (фиг.16) закреплен на валу 11 посредством гайки 88. Длина l12 активной части 16 ротора 12 двигателя выполнена с отношением 1,1-1,2 к длине l13 активной части 89 статора 4 двигателя. Перпендикулярная продольной оси 20-20 вала 11 плоскость симметрии 90-90 активной части 16 ротора 12 двигателя смещена в сторону узла ротора 14 гироскопа на расстояние l14, составляющее 0,055-0,065 от длины l13 активной части 89 статора 4 двигателя, относительно плоскости симметрии 91-91 активной части 89 статора 4 двигателя.
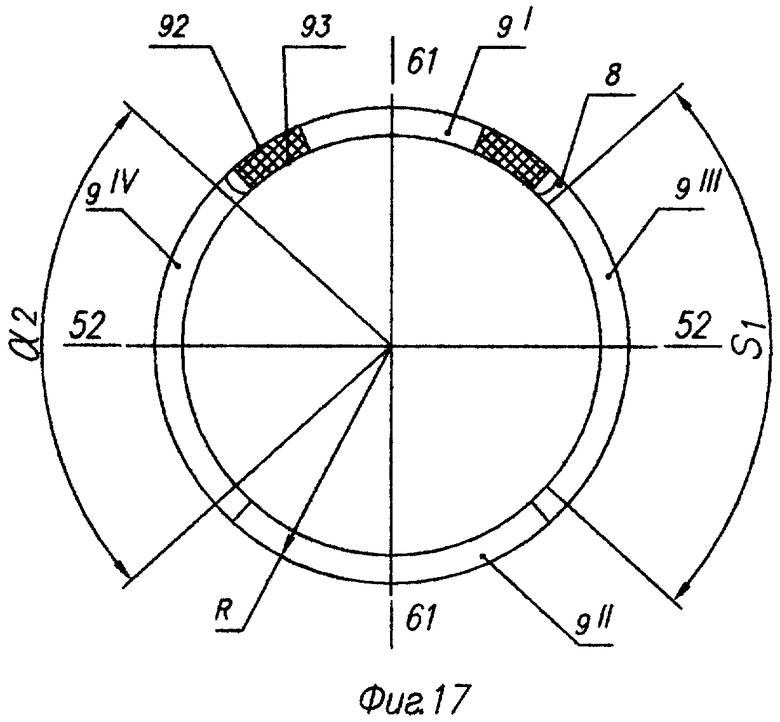
На оправке 8 (фиг.17) в виде полого цилиндра установлены расположенные симметрично относительно первой плоскости 52-52 бескаркасные компенсационные катушки 9', 9" первого преобразователя момента, а также расположенные симметрично относительно второй плоскости 61-61 бескаркасные компенсационные катушки 9"', 9IV второго преобразователя момента. Каждая из компенсационных катушек 9', 9", 9"', 9IV своей внешней поверхностью 92 и внутренней поверхностью 93 повторяет профиль оправки 8 и выполнена с угловым расположением α2 от 75 до 85° с размером по дуге s1=Rα2, где R - внешний радиус оправки 8.
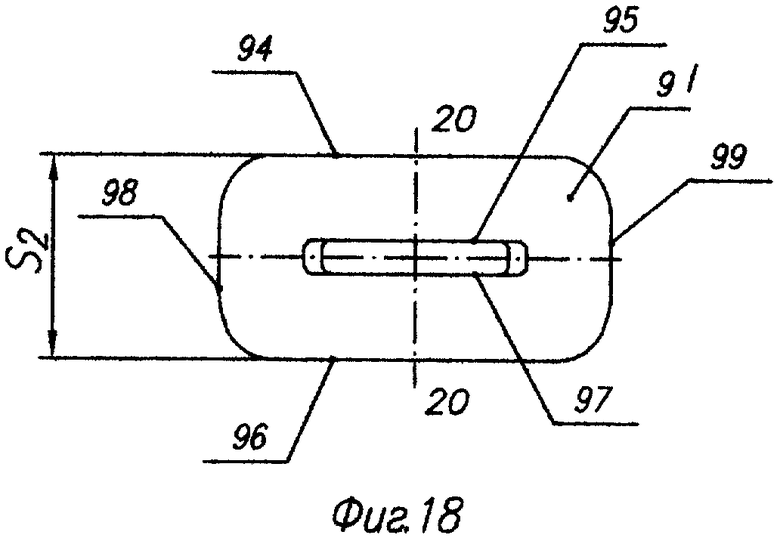
В виде в плане (фиг.18) компенсационная катушка 9' выполнена прямоугольной по форме. Ее размер s2 вдоль продольной оси 20-20 выполнен таким, что размер s1 по дуге с углом α2 в 2-2,3 раза больше размера s2.
В компенсационной катушке 9' витки, расположенные в одной ее половине между внешней поверхностью 94 и внутренней поверхностью 95, направлены параллельно торцевой плоскости оправки 8. Также направлены параллельно торцевой плоскости оправки 8 витки, расположенные между внешней поверхностью 96 и внутренней поверхностью 97 компенсационной катушки 9'. Боковые поверхности 98, 99 компенсационной катушки 9' имеют криволинейную поверхность. Аналогичным образом выполнены компенсационные катушки 9", 9"', 9IV.
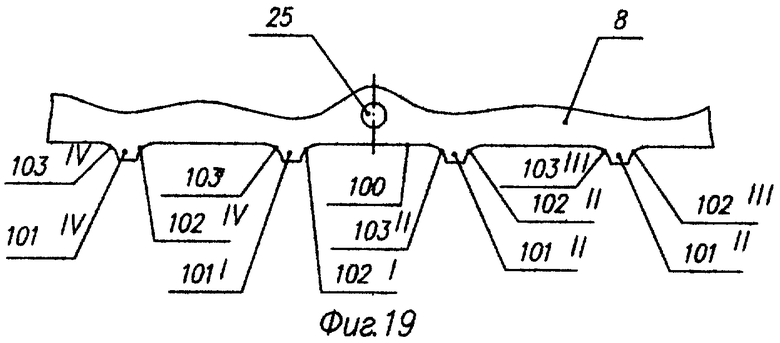
В частном случае выполнения гироскопа на торцевой плоскости 100 обоймы 8 (фиг.19) расположены выступы 101', 101", 101"', 101IV, имеющие с одной стороны соответственно криволинейные поверхности 102', 102", 102"', 102IV, а с другой стороны - криволинейные поверхности 103', 103", 103"', 103IV.
Конфигурация поверхности 102' выступа 101' повторяет конфигурацию боковой поверхности 98 компенсационной катушки 9', а конфигурация поверхности 103" выступа 101" совпадает с конфигурацией боковой поверхности 99 компенсационной катушки 9'.
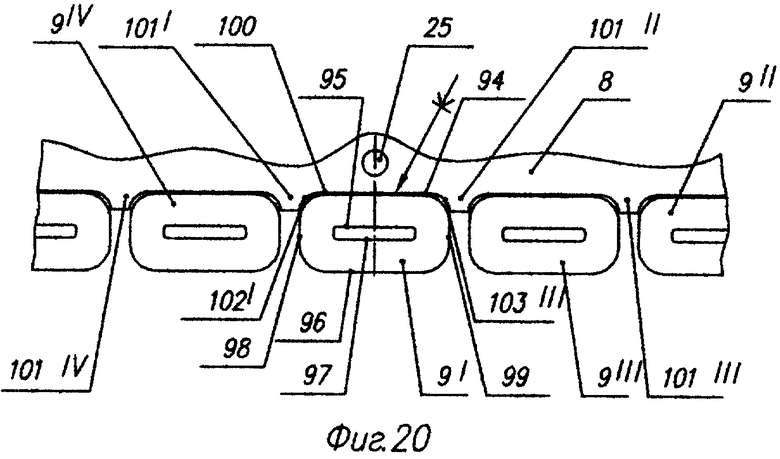
Компенсационная катушка 9' (фиг.20) установлена между выступами 101' и 101" обоймы 8 на ее торцевой плоскости 100 так, что ее внешняя поверхность 94 совмещена с торцевой плоскостью 100 обоймы 8, боковая поверхность 98 совмещена с поверхностью 102' выступа 101', боковая поверхность 99 совмещена с поверхностью 103" выступа 101". При этом выступы 101', 101" направлены в сторону второй половины компенсационной катушки 9" между внешней поверхностью 96 и внутренней поверхностью 97, выступы 101', 101" охватывают с двух сторон часть первой половины компенсационной катушки 9' между внешней поверхностью 94 и внутренней поверхностью 95. Аналогичным образом с поверхностями обоймы 8 совмещены поверхности компенсационных катушек 9", 9"', 9IV.
Компенсационная катушка 9" закреплена между выступами 101"' и 101IV, компенсационная катушка 9"' закреплена между выступами 101" и 101"', а компенсационная катушка 9IV закреплена между выступами 101', 101IV.
Между поверхностями 94, 98, 99 компенсационной катушки 9', контактирующими с поверхностями 100, 102', 103" обоймы 8, выполнено клеевое соединение. Аналогичные клеевые соединения выполнены между поверхностями обоймы 8 и компенсационных катушек 9", 9"', 9IV.
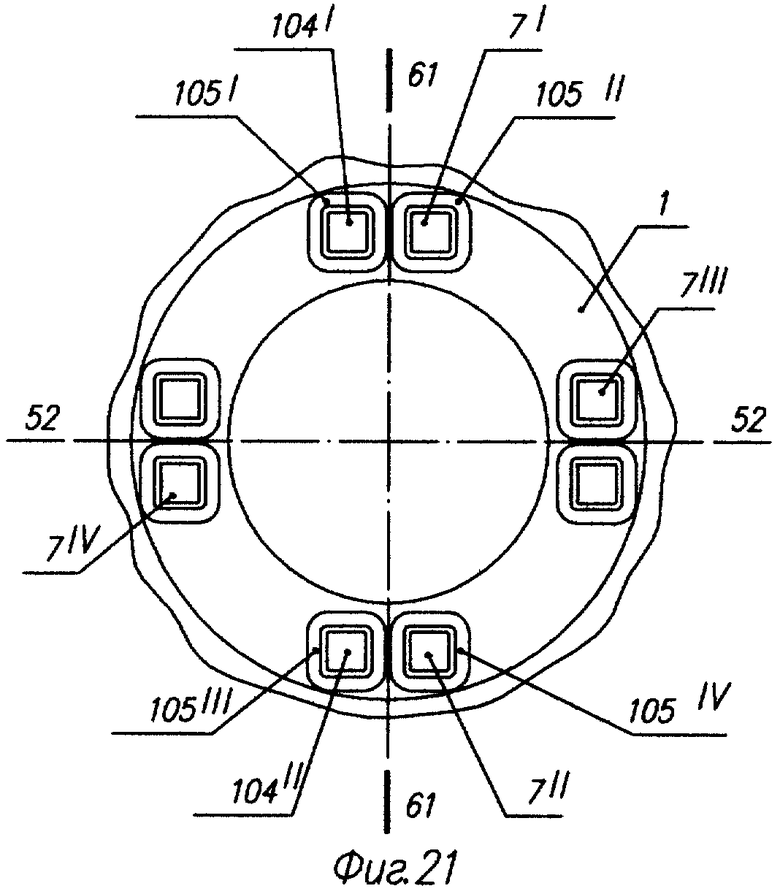
В корпусе 1 гироскопа (фиг.21) неподвижные части 7', 7" первого преобразователя положения расположены симметрично относительно первой плоскости 52-52, а неподвижные части 7"', 7IV второго преобразователя положения расположены симметрично относительно второй плоскости 61-61.
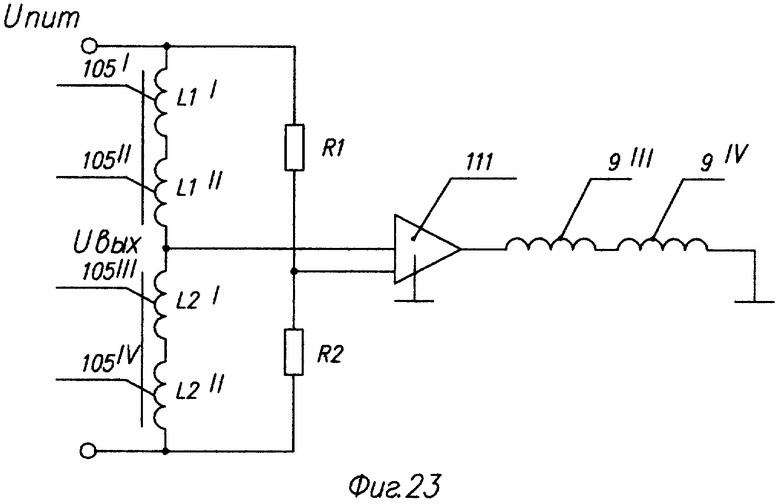
Неподвижная часть 7' первого преобразователя положения содержит сердечник 104' и первую обмотку 105' с индуктивностью L1' и вторую обмотку 105" с индуктивностью L1", a неподвижная часть 7" содержит сердечник 104" и первую обмотку 105"' с индуктивностью L2' и вторую обмотку 105IV с индуктивностью L2". Аналогично выполнены неподвижные части 7"', 7IV второго преобразователя положения.
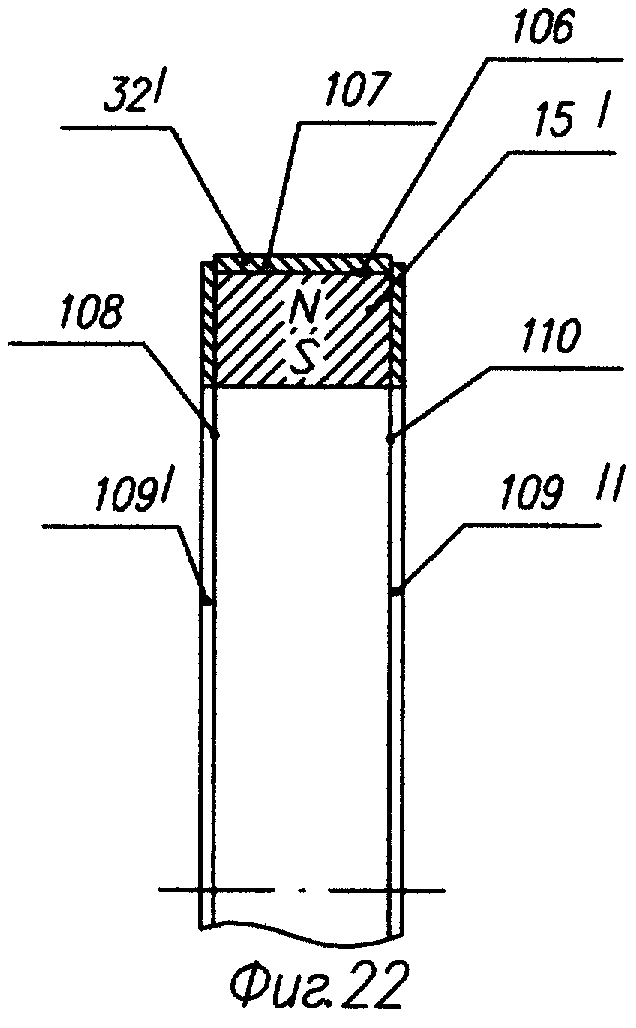
Колпак 32' (фиг.22) на постоянном магните 15' содержит установленную на внешней цилиндрической поверхности 106 постоянного магнита 15' и выполненную из магнитомягкого железа крышку 107, а также расположенную на торце 108 постоянного магнита 15' стенку 109' и расположенную на торце 110 постоянного магнита 15' стенку 109'. Стенки 109', 109" изготовлены из немагнитной стали.
Аналогичным образом выполнен колпак 32" на постоянном магните 15".
В гироскопе (фиг.23) в выполненном по мостовой схеме первом преобразователе положения обмотки 105', 105", 105"', 105IV включены последовательно, резисторы R1 и R2 соединены последовательно. Напряжение питания переменного тока Uпит подключено к обмотке 105' и резистору R1, а также к обмотке 105IV и резистору R2. Сигнал с выхода мостовой схемы первого преобразователя положения снимается с точки соединения обмоток 105", 105"' и с точки соединения резисторов R1 и R2 и подается на вход дифференциального усилителя 111, содержащего усилитель переменного тока, демодулятор и усилитель постоянного тока. К выходу усилителя 111 подключены соединенные последовательно компенсационные катушки 9"', 9IV второго преобразователя момента.
Аналогичным образом выполнено соединение второго преобразователя положения и первого преобразователя момента.
В гироскопе в качестве газовой среды использован водород при давлении от 4 до 20 мм рт.ст., обращенные в сторону внутренней полости гироскопа части корпуса 1, первой 2 и второй 3 крышек, а также статор 4 и ротор 12 двигателя, шарикоподшипники 6', 6" привода, вал 11, узел 13 двухстепенного упругого подвеса, узел ротора 14 гироскопа, ободок 8, колпаки 32', 32" с загерметизированными в них постоянными магнитами 15', 15", компенсационные катушки 9', 9", 9"', 9IV первого и второго преобразователей момента, неподвижные части 7', 7", 7"', 7IV первого и второго преобразователей положения выполнены предварительно наводороженными путем выдержки в среде водорода при давлении 450 мм рт.ст. в течение 210 ч в составе гироскопа.
В качестве свободного гироскопа при наличии угловой скорости по первой измерительной оси, направленной по линии пересечения первой плоскости 52-52 с третьей плоскостью 67-67, угловое перемещение узла ротора 14 гироскопа измеряется первым преобразователем положения, и с выхода его мостовой схемы поступает сигнал, пропорциональный угловой скорости по первой измерительной оси. При наличии угловой скорости по второй измерительной оси, направленной по линии пересечения второй плоскости 61-61 с третьей плоскостью 67-67, угловое перемещение узла ротора 14 измеряется вторым преобразователем положения, и с выхода его мостовой схемы поступает сигнал, пропорциональный угловой скорости по второй измерительной оси.
В качестве датчика угловой скорости при наличии угловой скорости по первой измерительной оси сигнал углового перемещения узла ротора 14 гироскопа с выхода мостовой схемы первого преобразователя положения усиливается в усилителе 111 и подается в компенсационные катушки 9"', 9IV второго преобразователя момента. В результате узел ротора 14 гироскопа возвращается в исходное положение, а ток компенсационных катушек 9"', 9IV является мерой угловой скорости по первой измерительной оси. При наличии угловой скорости по второй измерительной оси усиленный сигнал мостовой схемы второго преобразователя положения подается в компенсационные катушки 9', 9" первого преобразователя момента, и их ток является мерой угловой скорости по второй измерительной оси гироскопа.
При статической балансировке узла ротора 14 гироскопа удаление масс производится или на выступах 87V, 87VI, 87VII, 87VIII второго пояска 85", или выступах 87IX, 87Х, 87XI, 87XII третьего пояска 85"' в зависимости от знака момента дисбаланса узла ротора 14 гироскопа.
При статической балансировке радиального дисбаланса удаление масс производится с выступов 87' или 87"', 87" или 87IV первого ободка 85' в зависимости от углового положения микрообъема с наибольшей плотностью в узле ротора 14 гироскопа.
При динамической балансировке удаление масс производится с выступа 87V на втором пояске 85" и с выступа 87XI на третьем пояске 85"' или с выступа 87VII на втором пояске 85" и с выступа 87IX на третьем пояске 85"', с выступа 87VI на втором пояске 85" и с выступа 87XII на третьем пояске 85"' или с выступа 87XIII на втором пояске 85" и с выступа 87Х на третьем пояске 85"' в зависимости от фазы положения вдоль продольной оси 20-20 вала 11 микрообъема с наибольшей плотностью в узле ротора 14 гироскопа.
Выполнением выступов 87', 87"...87XII и поясков 85', 85", 85"' заодно с внешней частью 31 маховика 29 достигается стабильность размеров устройства балансировки гироскопа за счет устранения перемещаемых масс, в результате чего обеспечивается повышение точности балансировки узла ротора 14.
Когда диаметр поясков 85', 85", 85"' составляет 1,05-1,10 от внешнего диаметра внешней части 31 маховика 29, ширина каждого из поясков 85', 85", 85"' составляет 0,08-0,12 от длины внешней части 31 маховика 29, выступы 87', 87"...87XII распространены на угол до 25°, а высота выступов 87', 87"...87XII составляет до 0,015 от диаметра поясков 85', 85", 85"', то обеспечивается такая миниатюризация узла ротора 14 гироскопа, при которой балансировка производится путем удаления масс посредством луча лазера на основе алюмоиттриевого граната, обеспечивающего глубину обработки до 1,5 мм при диаметре пятна сфокусированного лазерного луча до 0,3 мм.
При вышеуказанных соотношениях размеров поясков 85', 85", 85"', выступов 87', 87"...87XII и внешней части 31 маховика 29 при балансировке обеспечивается образование минимального количества дисперсного металла, что уменьшает вероятность загрязнения упругих перемычек 51', 51", 56', 56", 68', 68", 74', 74" и изменения динамической настройки гироскопа.
Одновременно с этим достигается оптимальная прочность внешней части 31 маховика 29 без чрезмерного увеличения массы маховика 29, что повышает стабильность его размеров. Результатом является повышение стабильности кинетического момента узла ротора 14 гироскопа.
При динамической балансировке ротора 12 двигателя его центр масс сводится к точке пересечения продольной оси 20-20 вала 11 с плоскостью симметрии 90-90. Балансировка производится путем подборки масс шпилек 19', 19"...19VIII, устанавливаемых по окружности втулки 17. Для подбора масс изготавливается комплект шпилек 19', 19"...19VIII калиброванной длины.
При динамической балансировке узла вращения гироскопа, включающего ротор 12 двигателя, вал 11, внутренние кольца 10', 10" шарикоподшипников 6', 6" привода, узел 13 двухстепенного упругого подвеса, узел ротора 14 гироскопа, перемещают шпильки 19', 19"...19VIII попарно в разные стороны по продольной оси 20-20 вала 11.
В реальной конструкции двигателя (фиг.16) зазоры δ2 и δ3 между внешней поверхностью активной части 16 ротора 12 двигателя и внутренней поверхностью активной части 89 статора 4 не равны. Если δ2<δ3, то возникает радиальная сила Fрад, действующая на ротор 12 двигателя и вызывающая угловые вибрации ротора 12 относительно центра симметрии (ц.с.) узла вращения гироскопа.
За счет смещения плоскости симметрии 90-90 активной части 16 ротора 12 двигателя на расстояние l14=(0,055-0,065)·l13 (l13 - длина активной части 89 статора 4 двигателя) на ротор 12 двигателя действует осевая сила Fос.
В итоге сумма действующих на ротор 12 двигателя моментов равна нулю:
Fрад·l15-Fос·l16=0,
где l15 - плечо действия силы Fрад, равное расстоянию от центра симметрии (ц.с.) узла вращения гироскопа до направления действия силы;
l16 - плечо действия силы Fос, равное расстоянию от центра симметрии (ц.с.) узла вращения гироскопа до направления действия силы (расстояние l16 определяется величиной разности зазоров δ2 и δ3).
Результатом равенства действующих на ротор 12 двигателя моментов является устранение угловых вибраций ротора 12 двигателя относительно центра симметрии узла вращения гироскопа, вызванных неидеальной геометрией ротора 12 двигателя и статора 4.
При динамической балансировке узла ротора 14 гироскопа совмещают центр масс узла ротора 14 гироскопа с продольной осью 20-20 вала 11. Для этого в центральное отверстие 21 второй части 23 вала 11 вставляют стяжку и ввинчивают ее в резьбовое отверстие 26, фиксируя первую часть 22 вала 11 относительно второй части 23. Затем в окно 25 в оправке 8 вставляют рычаг и, нажимая им на выходящую за пределы маховика 29 часть упора 36, перемещают первую часть 22 вала 11 относительно второй части 23 в направлении, перпендикулярном продольной оси 20-20 вала 11. Клеевое соединение 24 по внутренней цилиндрической поверхности второй части 23 вала 11 и по внешней цилиндрической поверхности первой части 22 вала 11, выполненное на длине l1, большей половины длины каждой первой части 22 и второй части 23 вала 11, обеспечивает стабильность установленного взаимного положения первой части 22 и второй части 23 вала 11 относительно друг друга и сохранение параметров балансировка узла ротора 14 гироскопа.
Так как продольная ось окна 25 расположена в области середины первой части 22 вала 11, то первая часть 22 перемещается поступательно относительно второй части 23 вала 11. Поэтому при балансировке обеспечивается более точное совмещение центра масс узла ротора 14 гироскопа с продольной осью 20-20 вала 11.
Во время технологического процесса заполнения гироскопа водородом гироскоп через отверстие в первой крышке 2, еще не закрытое первой пробкой 27, герметично соединяют с вакуумной системой и обезгаживают. Если бы отсутствовала вторая пробка 28, то путь удаляемого при обезгаживании воздуха проходил через центральное отверстие 21 вала 11. При этом находящиеся в воздухе посторонние частицы оседали бы на упругих перемычках 51', 51", 56', 56", 68', 68", 74', 74".
Осевшие на упругих перемычках посторонние частицы изменяют динамическую настройку узла ротора 14 гироскопа, что приводит к появлению погрешности измерения угловой скорости.
При установке второй пробки 28 соосно с валом 11 и первой пробкой 27 в центральном отверстии 21 вала 11 перекрывается путь прохождения воздуха через центральное отверстие 21 и упругие перемычки 51', 51", 56', 56", 68', 68", 74', 74", устраняя тем самым осаждение посторонних частиц на упругих перемычках. В результате сохраняется динамическая настройка узла ротора 14 гироскопа.
Для предварительного наводороживания гироскоп через отверстие в первой крышке 2, еще не закрытое первой пробкой 27, герметично соединяют с вакуумной системой, обезгаживают, заполняют внутреннюю полость гироскопа водородом при давлении 450 мм рт.ст. и выдерживают в течение 210 ч. Для заполнения доводят давление водорода до 4...20 мм рт.ст. и закрывают первую крышку 2 первой пробкой 27.
После предварительного наводороживания корпус 1, первая крышка 2, вторая крышка 3, статор 4 и ротор 12 двигателя, вал 11, шарикоподшипники 6', 6" привода, обойма 8, неподвижные части 7', 7", 7"', 7IV преобразователей положения, компенсационные катушки 9', 9", 9"', 9IV преобразователей момента, узел 13 двухстепенного упругого подвеса, узел ротора 14, колпаки 32', 32" не адсорбируют водород из внутренней полости гироскопа, в которой создано давление водорода 4...20 мм рт.ст. В результате давление водорода во внутренней полости гироскопа остается в пределах, полученных при заполнении, и характеристики дрейфа гироскопа остаются на уровне первоначальных значений.
Постоянные магниты 15', 15" из сплава с редкоземельным металлом Sm2CO5 вследствие их большой магнитной энергии позволяют выполнить больший зазор между ними и внутренней поверхностью внешней части 31 маховика 29, чем обеспечивается увеличение количества витков компенсационных катушек 9', 9", 9"', 9IV и напряженности магнитного поля компенсационных катушек 9', 9", 9"', 9IV. Результатом является увеличение момента, развиваемого преобразователем момента.
Когда постоянные магниты 15', 15" закрыты колпаками 32', 32" и загерметизированы, то устраняется разрушающее действие водорода на сплав с редкоземельным металлом Sm2CO5, и постоянные магниты 15', 15" не теряют своей целостности.
Стенки 109', 109" колпака 32', выполненные из немагнитной стали, уменьшают рассеяние магнитного поля. Крышка 107 из магнитомягкого железа обеспечивает путь магнитного потока постоянного магнита 15' в рабочий зазор преобразователя момента.
Итогом является увеличение магнитного потока в рабочем зазоре преобразователя момента, повышение создаваемого преобразователем момента момента.
У компенсационных катушек 9', 9", 9"', 9IV, выполненных прямоугольными в плане с угловым распространением 75-85° и отношением 2-2,3 их длины к ширине, увеличивается активная доля витков, находящихся в магнитном поле постоянных магнитов 15', 15". Поэтому увеличивается момент, создаваемый преобразователем момента.
В случае установки компенсационных катушек 9", 9"', 9IV так же, как и компенсационная катушка 9', когда она закреплена между выступами 101' и 101" обоймы 8 на ее торцевой плоскости 100 путем совмещения боковой поверхности 98 с поверхностью 102' выступа 101', а боковой поверхности 99 с поверхностью 103" выступа 101", достигается более точная ориентация компенсационных катушек 9', 9", 9"', 9IV относительно измерительных осей гироскопа. Поэтому минимизируются поперечные связи между измерительными осями гироскопа.
Вследствие того, что температурные коэффициенты бериллиевой бронзы БрБ2, из которой выполнена цанга 33, и вольфрамоникелемедного сплава, из которого выполнена штанга 34, близки, то сохраняется динамическая настройка гироскопа в широком диапазоне рабочих температур окружающей среды.
При совмещении продольных осей первой канавки 59 и второй канавки 60 первого узла 41 однорамочного подвеса, третьей канавки 72 и четвертой канавки 73 второго узла 42 однорамочного подвеса по прямой линии 76-76 упругие перемычки 51', 51", 56', 56", 68', 68", 74', 74" располагаются в пары так, что в каждой паре одна упругая перемычка расположена в плоскости, перпендикулярной плоскости, в которой расположена другая упругая перемычка. Так, упругая перемычка 51' первого узла 41 однорамочного подвеса и упругая перемычка 68' второго узла 42 однорамочного подвеса образуют пару, расположенную по одну сторону от продольной оси 20-20 вала 11, причем упругая перемычка 51' расположена в первой плоскости 52-52, а упругая перемычка 68' расположена в перпендикулярной ей третьей плоскости 67-67. С противоположной стороны относительно продольной оси 20-20 вала 11 расположена другая пара перемычек 51" и 68", находящихся соответственно в первой плоскости 52-52 и третьей плоскости 67-67.
В третьей паре упругая перемычка 56' и упругая перемычка 74' расположены по одну сторону от продольной оси 20-20 вала 11, причем упругая перемычка 56' расположена во второй плоскости 61-61, в перпендикулярной ей третьей плоскости 67-67 расположена упругая перемычка 74'. Аналогичную пару составляют упругие перемычки 56" и 74".
При этом общая ось изгиба упругих перемычек 51', 51", 68', 68" расположена на линии пересечения первой плоскости 52-52 с третьей плоскостью 67-67, а общая ось изгиба упругих перемычек 56', 56", 74', 74" расположена на линии пересечения второй плоскости 61-61 с третьей плоскостью 67-67.
В результате такого расположения осей изгиба упругих перемычек и попарного сочетания упругих перемычек, выполнения сварных швов посредством лазерной сварки по периметрам 77, 78 совмещения торцов первого узла 41 однорамочного подвеса и второго узла 42 однорамочного подвеса создается равножесткий двухстепенный упругий подвес узла ротора 14 гироскопа.
Когда все упругие перемычки 51", 56', 56", 68', 68", 74', 74" выполнены идентичными с упругой перемычкой 51', образованной отверстиями 54', 54" диаметром d4 при их межцентровом расстоянии l2=(1,02-1,03)·d4 и высоте h1≥0,45d4, то жесткость упругого подвеса вдоль осей изгиба упругих перемычек по крайней мере на три порядка больше жесткости упругого подвеса относительно оси изгиба упругих перемычек. При этом динамическая настройка гироскопа осуществляется при оптимальной скорости вращения двигателя, при которой обеспечивается прочность узла ротора 14 гироскопа при его минимальных габаритах.
При измерении угловой скорости по первой измерительной оси происходит угловое перемещение узла ротора 14 гироскопа относительно оси изгиба упругих перемычек 51', 51", 68', 68", расположенной на линии пересечения первой плоскости 52-52 с третьей плоскостью 67-67. А при измерении угловой скорости по второй измерительной оси угловое перемещение узла ротора 14 гироскопа происходит относительно оси изгиба упругих перемычек 56', 56", 74', 74", расположенной на линии пересечения второй плоскости 61-61 с третьей плоскостью 67-67.
Выполнение узла 13 двухстепенного упругого подвеса из высокопрочного элинвара с высоким модулем упругости первого рода и низким температурным коэффициентом линейного расширения позволяет уменьшить его размеры для выполнения заданной жесткости упругих перемычек 51', 51", 56', 56", 68', 68", 74', 74" и одновременно обеспечивает стабильность их жесткости в широком диапазоне рабочих температур окружающей среды.
При выполнении маховика 29 из железокобальтового сплава с высокой индукцией насыщения в слабых магнитных полях обеспечивается высокая магнитная индукция в рабочем зазоре преобразователей момента, образованном между внешней поверхностью постоянных магнитов 15', 15" и внутренней поверхностью внешней части 31 маховика 29. Поэтому повышается развиваемый преобразователем момента момент.
Четыре пружины 80', 80", 80"', 80IV цанги 33 центрируют штангу 34, обеспечивая стабильное положение ее центра масс, чем достигается стабильность дрейфа гироскопа за счет стабильности частоты динамической настройки.
Комбинированное сварное соединение по периметру 81 соединения торца 82 неразрезной части 79 цанги 33 с торцом 83 внутренней рамки 44 первого узла 41 однорамочного подвеса с клеевым соединением на длине неразрезной части 79 цанги 33 внешней поверхности неразрезной части 79 цанги 33 с внутренней поверхностью внутренней рамки 44 первого узла 41 однорамочного подвеса обеспечивает уменьшенные температурные деформации соединяемых деталей и придает им стабильный характер. Поэтому уменьшаются случайная и систематическая составляющие дрейфа гироскопа.
В режиме термостатирования гироскопа для поддержания номинальной рабочей температуры используется тепло, создаваемое двигателем гироскопа и первым 37' и вторым 37" пленочными нагревательными элементами. При сопротивлении второго пленочного нагревательного элемента 37" в два раза большем сопротивления первого пленочного нагревательного элемента 37' достигается равномерность теплового поля в объеме гироскопа.
Источники информации
1. Патент Франции №2322366, кл. G01М 1/20. Вращающиеся, динамически настраивающиеся устройства, образующие гироскопы и акселерометры. 1976.
2. Патент США №3354726, кл. 74-5. Двухстепенный гироскоп. 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2002 |
|
RU2215261C2 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
| ГИРОСКОП | 2001 |
|
RU2210734C2 |
| УПРУГИЙ КАРДАНОВЫЙ ПОДВЕС ГИРОСКОПА | 1995 |
|
RU2093793C1 |
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ И СПОСОБ КОМПЕНСАЦИИ ДРЕЙФА НУЛЕВОГО СИГНАЛА ГИДРОДИНАМИЧЕСКОГО ГИРОКОМПАСА | 2004 |
|
RU2270419C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости с двухстепенным упругим подвесом чувствительного элемента. В гироскопе с упругим подвесом, обеспечивающим динамическую настройку, состоящий из двух узлов однорамочного подвеса узел двухстепенного упругого подвеса выполнен из высокопрочного элинвара с высоким модулем упругости и малым температурным коэффициентом линейного расширения (ТКЛР). На торцах его узлов выполнены совмещаемые при сборке канавки. Постоянные магниты выполнены из сегментов из сплава с редкоземельным металлом и герметично закрыты колпаками. Вал привода выполнен из двух частей, перемещаемых при сборке поступательно друг к другу в радиальном направлении к оси вала посредством рычага, опирающегося на установленный на одной части вала упор и проходящего через окно в оправке. Штанга в цанге узла двухстепенного упругого подвеса выполнена из сплава W-Ni-Co, имеющего ТКЛР, близкий к ТКЛР бериллиевой бронзы, из которой выполнена цанга с четырьмя пружинами. Маховик узла ротора гироскопа выполнен из сплава Fe-Co с высокой индукцией насыщения в слабых магнитных полях. Устройство балансировки выполнено единым элементом с маховиком в виде поясков с выступами. Детали гироскопа выполнены предварительно наводороженными для обеспечения равновесного состояния газовой среды в полости гироскопа, заполненной водородом при давлении 4-20 мм рт.ст. Техническим результатом изобретения является повышение точности измерения угловой скорости, повышение диапазона измерений, миниатюризация конструкции. 4 з.п. ф-лы, 23 ил.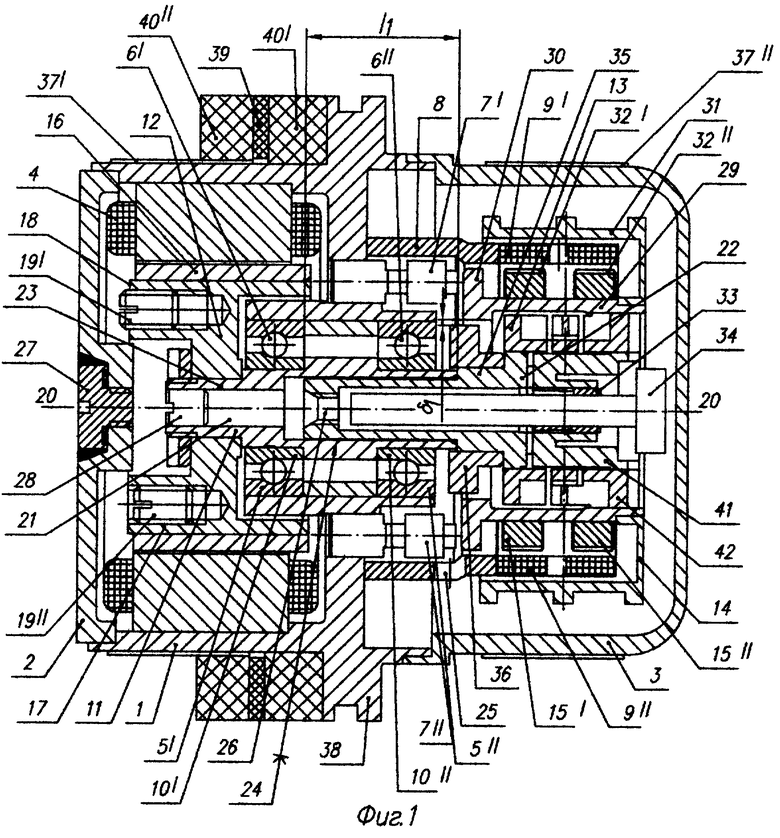
| US 3354726 А, 28.11.1967 | |||
| ГИРОСКОП | 2002 |
|
RU2215261C2 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ШАССИ С ПРИВОДОМ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ, В ЧАСТНОСТИ ПОВОРОТНЫХ ТЕЛЕЖЕК ДЛЯ НИЗКОРАМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2322366C1 |
| GB 1155545 А, 18.06.1969 | |||
| АТТРАКТАНТНЫЙ СОСТАВ ДЛЯ AGRIOTES TAURICUS HEYD (COLEOPTERA, ELATERIDAL) | 1992 |
|
RU2025066C1 |

