Техническое решение относится к электроизмерительной технике и автоматике и может быть использовано в системах дистанционного управления перемещением подвижных объектов.
Известен двухкоординатный преобразователь угловых перемещений, содержащий диэлектрический корпус, крышку, связанный с объектом контроля управляющий стержень, торцевая поверхность которого установлена на шаровой опоре (универсальном шарнире), четыре катушки индуктивности вихретокового датчика положения, равноудаленные от продольной оси преобразователя и расположенные в одной плоскости под углом 90° одна относительно другой, подпружиненные электропроводящие сердечники с наконечниками, установленные в корпусе концентрично катушкам индуктивности, подпружиненный относительно корпуса стаканообразный ползун, контактирующий с торцевой поверхностью управляющего стержня (ав. св. №1803722, МПК G01В 7/30, 1993).
Недостатком этого устройства является сложность конструкции и, как следствие, низкая надежность.
Технический результат предлагаемого изобретения выражается в упрощении конструкции двухкоординатного преобразователя угловых перемещений и повышении надежности.
Для достижения указанного результата двухкоординатный преобразователь угловых перемещений, содержащий диэлектрический корпус, крышку, связанный с объектом контроля управляющий стержень, торцевая поверхность которого установлена на шаровой опоре (универсальном шарнире), четыре катушки индуктивности вихретокового датчика положения, равноудаленные от продольной оси преобразователя и расположенные в одной плоскости под углом 90° одна относительно другой, подпружиненные электропроводящие сердечники с наконечниками, установленные в корпусе концентрично катушкам индуктивности, снабжен неподвижным относительно корпуса опорным кольцом, расположенным перпендикулярно движению сердечников, кроме того, радиус сердечника Rc больше радиуса наконечника Rн, a длина каждого наконечника равна расстоянию между контактной поверхностью опорного кольца и торцевой поверхностью управляющего стержня.
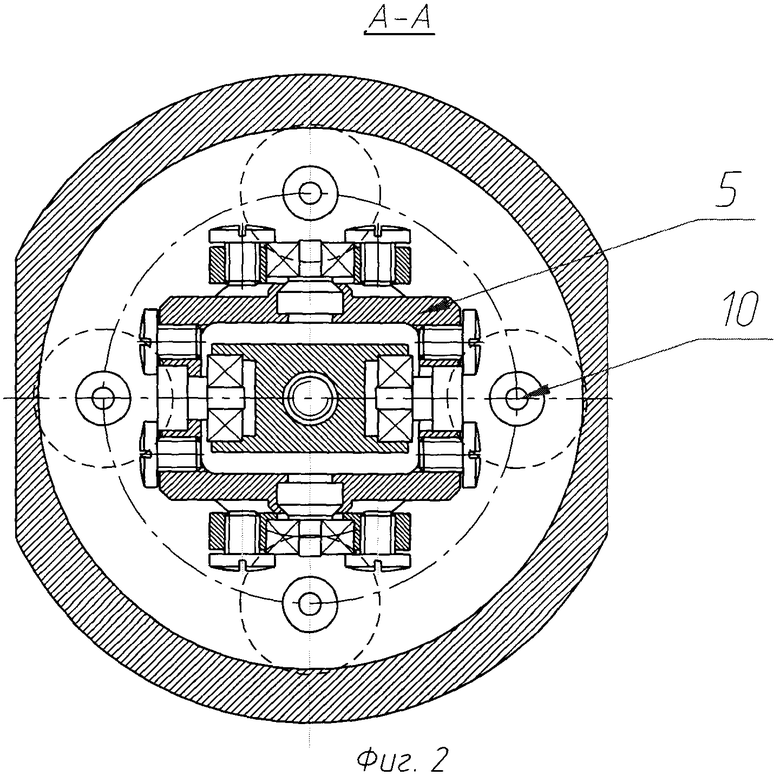
На фиг.1 показан внешний вид двухкоординатного преобразователя угловых перемещений, на фиг.2 - сечение А-А.
Двухкоординатный преобразователь угловых перемещений содержит диэлектрический корпус 1, крышку 2 с центральным отверстием, управляющий стержень 3 с торцевой поверхностью 4. Торцевая поверхность 4 перпендикулярна оси управляющего стержня 3, жестко связана с внешней рамкой универсального шарнира 5 и проходит через центр его вращения.
Угол поворота управляющего стержня 3 относительно центра вращения универсального шарнира 5 ограничен упором 6.
В корпусе 1 на одинаковом расстоянии от продольной оси преобразователя в отдельных пазах установлены четыре одинаковых электропроводящих сердечника 7, каждый из которых под действием соответствующей пружины 8 поджимается к опорному кольцу 9. Каждый из сердечников 7 имеет наконечник 10 радиусом Rн,<Rc, контактирующий острием с торцевой поверхностью 4 управляющего стержня 3, при этом длина каждого наконечника 10 должна быть равна расстоянию между контактной поверхностью опорного кольца 9 и торцевой поверхностью 4 управляющего стержня 3, что обеспечивает одновременное контактирование сердечников 7 с контактной поверхностью опорного кольца 9 и торцевой поверхности 4 с острием наконечников 10. Такое положение сердечников является исходным для преобразователя. Сердечники 7 охватывают концентрично расположенные обмотки 11 катушек индуктивности 12, образуя вихретоковый датчик положения. Катушки индуктивности 12 выставлены по высоте так, чтобы взаимное положение сердечников 7, находящихся в исходном положении, и обмоток 11 обеспечивало получение сигналов с обмоток 11, соответствующих исходному положению преобразователя.
Связь обмоток 11 катушек индуктивности 12 с блоками электроники осуществляется через разъем 13.
Двухкоординатный преобразователь работает следующим образом.
При наклоне управляющего стержня 3 от исходного положения, вслед за торцевой поверхностью 4, преодолевая действие пружины 8, начнет утопать вниз наконечник 10 с сердечником 7, выдавая пропорциональный величине перемещения сердечников 7 суммарный сигнал с обмоток 11. При этом вторая половина торцевой поверхности 4 начнет разворачиваться в противоположном направлении, разрывая контакт с соответствующими наконечниками 10, сохраняющими при этом исходное состояние, определяющееся контактированием сердечников 7 с контактной поверхностью опорного кольца 9.
После снятия возмущающего воздействия управляющего стержня 3 на пружины 8 последние начнут через наконечники 10 сердечников 7 разворачивать управляющий стержень 3 до момента соприкосновения сердечников 7 с контактной поверхностью опорного кольца 9, что соответствует исходному положению двухкоординатного преобразователя угловых перемещений.
Таким образом, наличие опорного кольца позволило упростить конструкцию преобразователя и повысить его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 2017 |
|
RU2653117C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| Вихретоковый преобразователь | 1975 |
|
SU627393A1 |
Изобретение относится к электроизмерительной технике и может быть использовано в системах дистанционного управления перемещением подвижных объектов. Сущность: преобразователь содержит корпус с крышкой, управляющий стержень, торцевая поверхность которого контактирует с наконечниками сердечников вихретокового датчика. Подпружиненные электропроводящие сердечники, радиусы которых больше радиусов наконечников, установлены в корпусе концентрично катушкам индуктивности и контактируют с поверхностью опорного кольца, установленного перпендикулярно движению сердечников. Длина каждого наконечника равна расстоянию между контактной поверхностью опорного кольца и торцевой поверхностью управляющего стержня. Технический результат: упрощение конструкции и повышение надежности. 2 ил.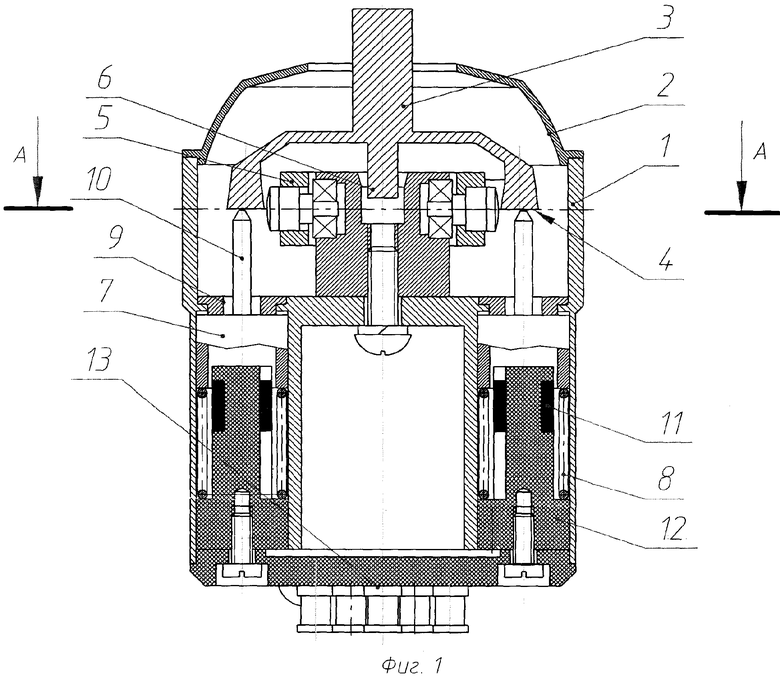
Двухкоординатный преобразователь угловых перемещений, содержащий диэлектрический корпус, крышку, связанный с объектом контроля управляющий стержень, торцевая поверхность которого установлена на шаровой опоре (универсальном шарнире), четыре катушки индуктивности вихретокового датчика положения, равноудаленные от продольной оси преобразователя и расположенные в одной плоскости под углом 90° одна относительно другой, подпружиненные электропроводящие сердечники с наконечниками, установленные в корпусе концентрично катушкам индуктивности, отличающийся тем, что снабжен неподвижным относительно корпуса опорным кольцом, расположенным перпендикулярно перемещению сердечников, кроме того, радиус сердечника Rс больше радиуса наконечника Rн, а длина каждого наконечника равна расстоянию между контактной поверхностью опорного кольца и торцевой поверхностью управляющего стержня.
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1599647A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| US 5911627 А, 15.06.1999 | |||
| СПОСОБ КОНТРОЛЯ состояния изоляции ДВИГАТЕЛЯ ПОГРУЖНОГО ЭЛЕКТРОНАСОСА | 0 |
|
SU271644A1 |

