Известные устройства для автоматического управления перемещением рабочих органов продольно-обрабатывающих станков, содержащие два задающих сельсина и сельсиндатчик, связанный с рабочим органом станка, неполностью удовлетворяют техническим требованиям на управление перемещением рабочих органов указанных станков, сравнительно сложны и недостаточно надежны в работе на требуемых режимах.
Предлагаемое устройство обеспечивает требуемые характеристики управления электроприводом стола продольно-обрабатывающих станков за счет того, что в нем применены фазочувствительные выпрямители, питаемые выходными напряжениями задающих сельсинов и триггеры Шмитта, подключенные к выходам фазочувствительных выпрямителей, и подающие команду на снижение скорости рабочего органа при входном напряжении, соответствующем заданному расстоянию до места реверса.
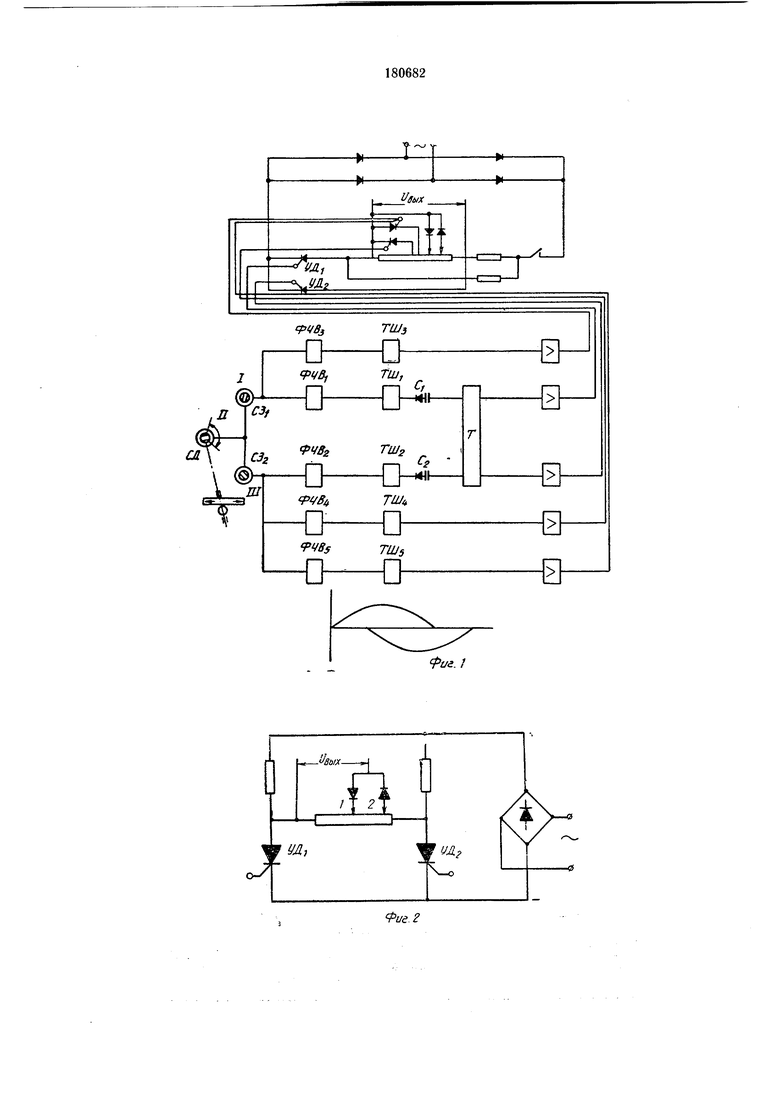
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 - схема изменения полярности задающего напряжения.
При движении стола в сторону рабочего хода в момент перехода роторов сельсина-датчика СД через положение согласования с сельсином C3i (совпадение осей / и //) на входе фазочувствительного усилителя ФЧВ меняется фаза напрял ения-на выходе усилителя ФЧВ меняется знак напряжения, в результате срабатывает триггер Шмитта ТШ с одним устойчивым состоянием и в момент переброса TZZ/1 через конденсатор Ci проходит импульс, перебрасывающий триггер J. После этого напряжение с выхода триггера через усилитель подается на управляющий электрод тиристора УД1, выходное напряжение устройства f/gyy изменяет свою полярность, и стол движется в сторону обратного хода. В момент перехода сельсина-датчика через положение согласования с сельсином СЗг (совпадение осей // и ///) на входе фазочувствительного
усилителя ФЧВ-2 меняется фаза напряжения, в результате чего его выходное напряжение меняет свой знак, и срабатывает триггер Шмитта ТШ. При перебросе ТШ через конденсатор Cz проходит импульс, который снова перебрасывает триггер, выходное напряжение с которого через усилитель подается на управляющий электрод тиристора УД-2 выходное напрял ение устройства меняет свой знак на обратный и стол движется в стоДвижение стола происходит в иределах, соответствующих углу между осями / и /// задающих сельсинов СЗ и СЗ. Для изменения длины хода стола вручную новорачивают роторы задающих сельсииов C3,i и СЗа. Угол разворота сельсинов в устройстве меняется в пределах 180°.
Фазочувствительные выпрямители ФЧВ, ФЧВ, ФЧВ и триггеры ТШз, ТШ,, ТШ, отстроены на определенный уровень напряжения срабатывания и служат для получения предварительных команд (команд на замедление).
Выходное напряжение фазочувствительного выпрямителя пропорционально амплитудному значению напряжения на выходной обмотке сельсина, а знак, зависящий от фазы напряжения выходной обмотки сельсина-трансформатора, меняется при переходе ротора сельсина-датчика через положение согласования.
Следовательно, величина напряжения на выходе фазочувствительного моста отражает относительное положение ротора сельсина-датчика и задающего сельсина, к которому подключен фазочувствительный выпрямитель, а угол между роторами задающих сельсинов-трансформаторов СЗ, и С32 определяет длину хода стола или место реверсов.
Для получения команд на замедление в начале и конце рабочего хода и конце обратного хода контролируют величину напряжения на выходе фазочувствительного выпрямителя с помощью триггера Шмитта, который настраивается на определенный уровень напряжения срабатывания. Тиристоры, позволяющие изменять знак выходного напряжения, включены по схеме, показанной на фиг. 2. Величина напряжения при подаче сигнала на управляющий электрод тиристора УДг определяется положением подвижного контакта /, а на управляющий электрод тиристора УД - положением контакта 2.
Такая схема позволяет уменьщить число тиристоров, снизить требования к быстродействию схемы управления тиристорами, а также управлять электромагнитными реле, втягивающие катущки которых подключаются к
выходу триггеров Шмитта.
Предмет изобретения
Устройство для автоматического управления перемещением рабочих органов продольно-обрабатывающих станков, содержащее два задаюищх сельсина и сельсин-датчик, связанный с рабочим органом станка, отличающееся тем, что, с целью улучщения качества обработки по краям изделия, в нем применены Фазочувствительные выпрямители, питаемые выходными напряжениями задающих сельсинов, и триггеры Шмитта, подключенные к выходам фазочувствительных выпрямителей и подающие команду на снижение скорости рабочего органа при входном напряжении, соответствующем заданному расстоянию до места реверса.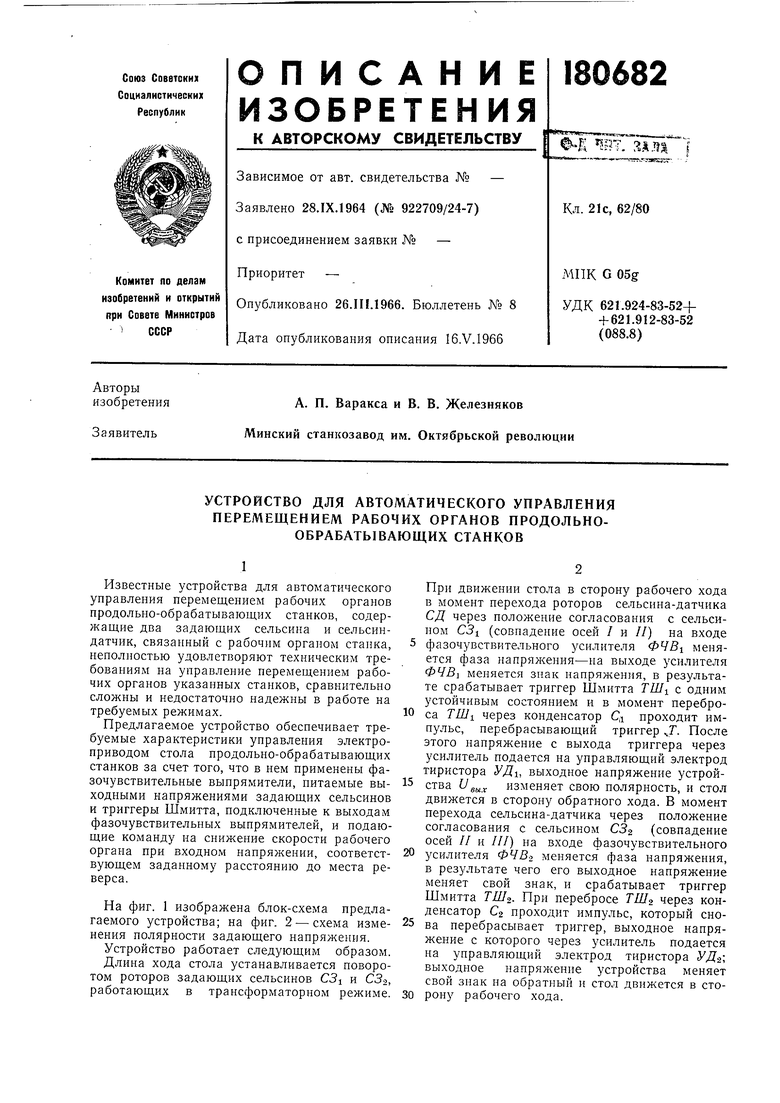
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
| Система управления приводом вращения пода кольцевой печи | 1979 |
|
SU1337882A1 |
| СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ ПЕРЕМЕЩЕНИЯ СТРОГАЛЬНОГО СТАНКА | 1971 |
|
SU312673A1 |
| ВСЕСОЮЗНАЯАвторы.'L~^''ii'--^»'™-^°''*изобретения М. Е. Бараб-Тарле, В. Г. Маранцман, М. П. Рашкович, Г. Б. СпокоиныиГГ Б. А. Тростановский, И. М. Шестопалов, С. Ф. Шифрин и Б. И. Шкловский | 1973 |
|
SU377733A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Многоканальный автономный прибор для исследования скважин в процессе бурения | 1981 |
|
SU983261A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| Многопозиционный электропривод постоянного тока | 1987 |
|
SU1432708A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |