Известна система для дистанционного управления приводом перемещения строгального станка, выполненная в виде задающих сельсинов, на выходах которых включены формирующие и переключающий блоки, осуществляющие реверс стола.
Недостатком известной системы является то, что интенсивность замедления скорости подвижного органа отличается от минимально возможной, в результате чего скорость уменьшается до самой малой прежде, чем подвижной орган (стол) доходит до места подачи команды на реверс. При этом остается участок, проходимый на самой малой скорости, что приводит к уменьшению производительности строгального станка.
Цель изобретения - увеличение производительности станка путем апроксимации выходного напряжения сельсина до вида, обеспечивающего постоянный темп падения скорости перемещения подвижного органа. Это достигается тем, что выход сельсина-задатчика подключен через параллельно соединенные выпрямитель и цепь отсечки напряжения на вход диодного ограничителя формирующего блока.
Для того, чтобы длина хода стола не отличалась от заданной, а производительность станка была максимальной, необходимо замедление начинать тем раньще, чем больще
скорость движения стола, а темп замедления поддерживать заданным и постоянным. При STOM скорость по мере подхода к месту реверса должна изменяться по следующему закону
,
где V- текущее значение скорости стола; а - заданный темп замедления; S - расстояние до места реверса.
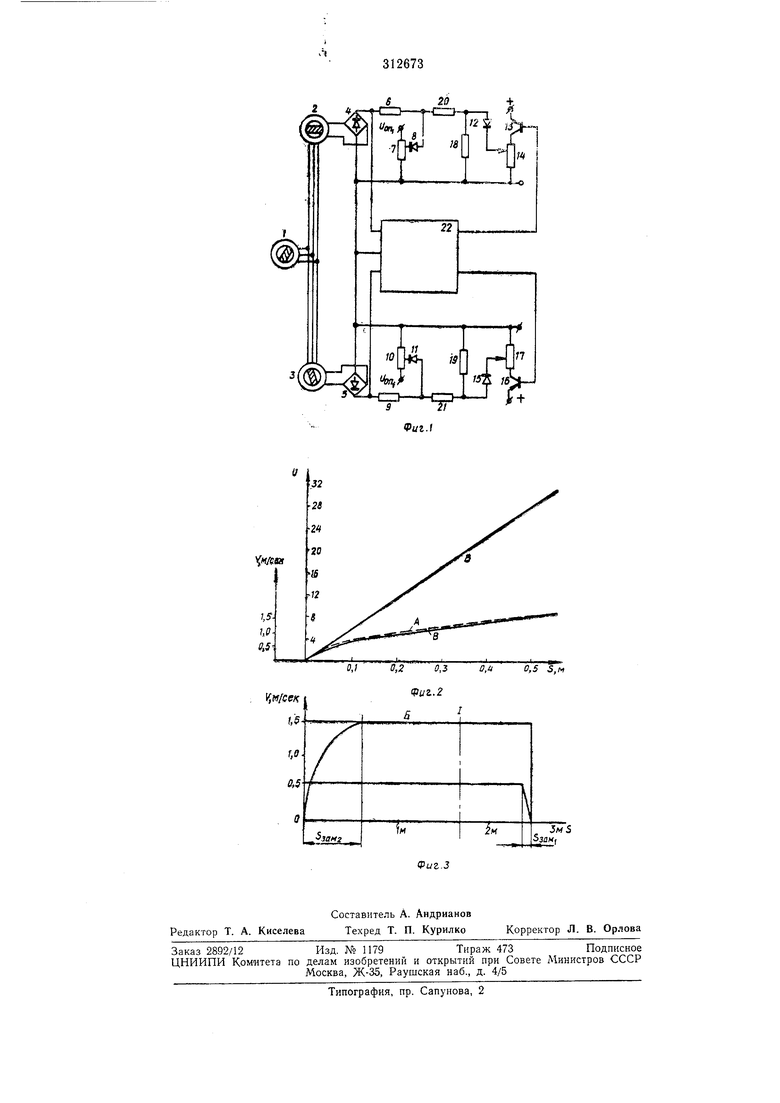
На фиг. 1 дана принципиальная схема предлагаемой системы; на фиг. 2 изображены кривая А, определяющая оптимальную зависимость текущего значения скорости, а значит задающего напряжения , определяющего скорость двигателя, от расстояния до места реверса при а 2 м/сек и /7макс 1,5 м/сек; кривая Б, определяющая зависимость выпрямленного напряжения сельсина от расстояния до места реверса при а 20 мм/град, где а - передаточное отнощение кинематической цепи стол-ротор сельсиндатчика; кривая В, определяющая зависимость бзад. получаемого в устройстве, от расстояния до места реверса; на фиг. 3 изображена диaгpaм a задающих напряжений при работе станка.
выходные напряжения сельсин-задатчиков. На выходах вылрямителя 4 включен формирователь задающего напряжения рабочего хода, выполненный из сопротивлений 6 п 7, диода 8 и источника опорного напряжения /рп .
На выходе выпрямителя 5 включен формирователь задающего напряжения обратного хода, выполненный из сопротивлений 9 и 10, диода // и источника опорного напряжения
OHj,
На выходе формирователя задающего напряжения рабочего хода включен ограпичигель напряжения, ограничивающий задающее напряжение величиной, обеспечивающей установившееся движение с установленной скоростью в сторону рабочего хода и выполненное из диода 12, транзистора 13, потенциометра 14. На выходе формирователя задающего напряжения обратного хода включен ограничитель задающего напряжения, ограничивающий задающее напряжение величиной, обеспечивающей установившееся движение с установленной скоростью в сторону обратного хода и выполненный из диода 15, транзистора 16 и потенциометра 17.
В систему введены входные сопротивления 18 я 19 и согласующие сопротивления 20 и 21.
В систему включен триггерный переключатель 22, перебрасывающий при согласовании роторов сельсин-датчика и сельсин-задатчиков. Причем при согласовании ротора сельсин-датчика с ротором сельсин-задатчика 2 (см. фиг. 1) открывается транзистор 16 и закрывается транзистор 13, а при согласовании ротора сельсин-датчика с ротором сельсин-задатчика 3 закрывается транзистор 16 и открывается транзистор 13.
Устройство работает следующим образом.
Пусть стол в рассматриваемый момент находится в положении I (см. фиг. 3) и движется в сторону рабочего хода. Скорость движения стола определяется задающим напряжением, которое изменяется по кривой Л. На расстояния 5зам1 ДО места реверса скорость стола начинает уменьшаться, следуя за изменением задающего напряжения. При достижении столом крайнего заданного положения триггерным переключателем 22 подается команда на реверс, при этом транзистор 13 закрывается, а транзистор 16 открывается. Стол движется в сторону обратного хода со скоростью, определяемой задающим напряжением, изменяющимся по кривой Б (см. фиг. 3). На расстоянии зам, ДО места реверса скорость стола начинает уменьшаться, следуя за изменением задающего напряжения. При достижении столом второго крайнего заданного положения триггерным переключателем 22 подается команда на реверс, при этом транзистор 16 закрывается, а транзистор 13 открывается. Начинается движение в сторону рабочего хода, и цикл повторяется, пока не даегся команда на остановку.
Предмет изобретения
Система для дистанционного управления приводом перемещения строгального станка, выполненная в виде задающих сельсинов, на выходах которых включены формирующие и переключающий блоки, отличающаяся тем, что, с целью увеличения производительности станка путем апроксимации выходного напряжения сельсина в виде, обеспечивающего постоянный темп падения скорости перемещения подвижного органа, выход сельсин-задатчика подключен через параллельно соединенные выпрямитель и цепь отсечки напряжения на вход диодного ограничителя формирующего блока.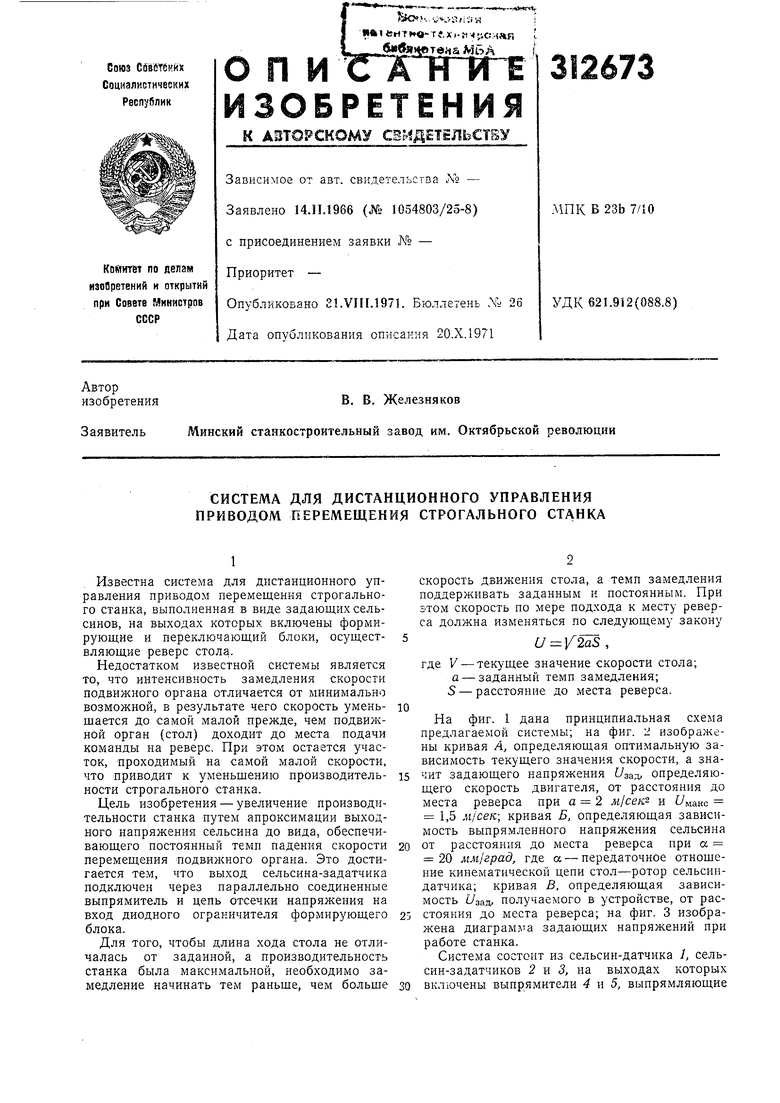

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧИХ ОРГАНОВ ПРОДОЛЬНО- ОБРАБАТЫВАЮЩИХ СТАНКОВ | 1966 |
|
SU180682A1 |
| Система управления привода стола продольно-строгального станка | 1973 |
|
SU446384A1 |
| Устройство управления перемещением стола продольно-обрабатывающего станка | 1983 |
|
SU1077753A1 |
| Устройство для дистанционного задания величины хода узлов станка | 1984 |
|
SU1228078A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Система управления агрегатом с петлевым устройством | 1982 |
|
SU1122387A1 |
| Продольно-обрабатывающий станок | 1972 |
|
SU467812A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| Устройство для управления длиной продольного хода стола шлифовального станка | 1982 |
|
SU1058757A1 |
| Система управления агрегатом с петлевым устройством | 1980 |
|
SU935873A1 |
0,2 0,20,10,5 S,M
9UZ..2
