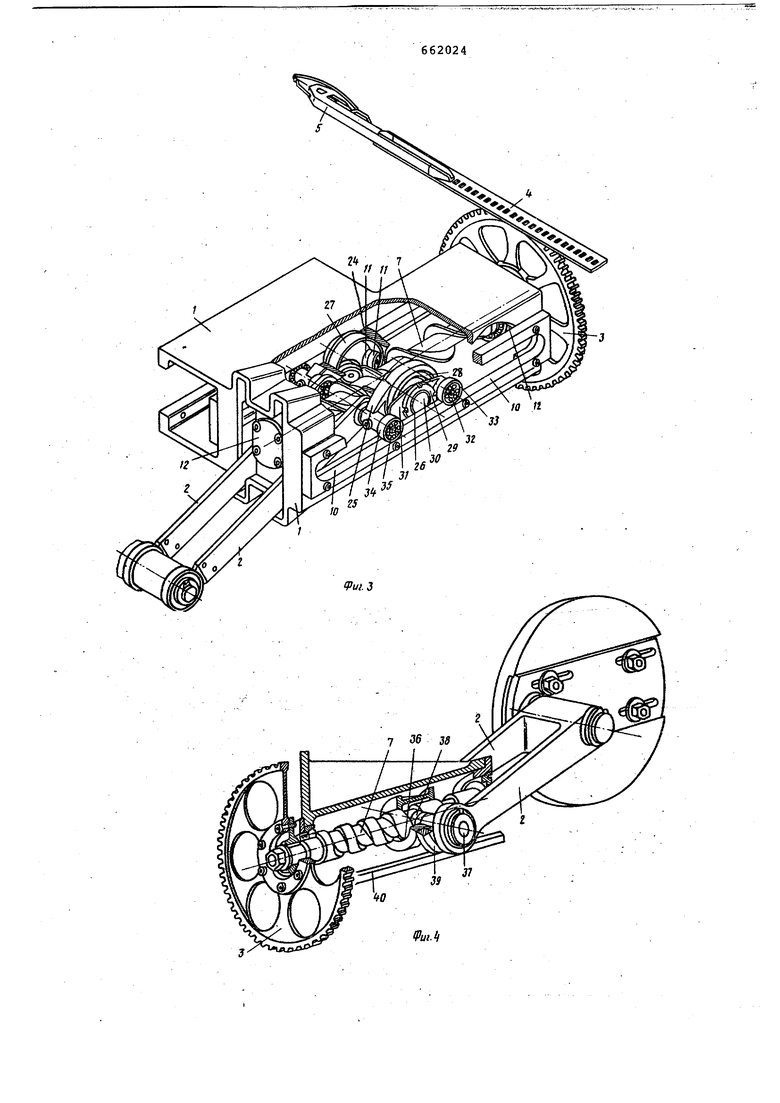
(54) ПРИВОД РАПИР ТКАЦКОГО СТАНКЛ В корпусе 1 механизма расположены элементы, служащие для преобразования прямолинейного возвратнопоступательного перемещения коромыс 2 в возвратно-вращательное движение шестерни 3, находящейся в зацеплени с перфорированной рейкой 4 рапиры 5. Второй конец коромысла шарнирно соединен с кривошипом б, установлен ным на главном валу ткацкого стан- ка. Для обеспечения различной величины перемещения рапиры 5 кривошип б выполнен регулируемым. К числу элементов, преобразумдих возвратно-поступательное перемещени корймысла в возвратно-вращательное шестерни, относятся следующие уста-. новленные в корпусе детали: ходовой винт 7, на одном конце, которого установлена шестерня, а другой конец свободен и размещен в опоре; ползун 8, установленный ,с возмож ностью возвратно-поступательного пе ремещения вдоль оси ходового винта и соединенный с коромыслом; опорные элементы ползуна, выполненные в вид пары башмаков 9, соединенных с пол эуном и установленных с возможность возвратно-поступательногр перемещен по направляющим 10 корпуса, параллельнЁви оси ходового винта; .четыре пары роликов 11, контакти руюиих с нйрезкой ходового винта И установленных на ползуне. . Ходовой винт выполнен с переменным шагом, т.е. с мёняймяимся вдоль оси наклоном винтовой линии. Уравнениё, выражакяцее закон изменения угла наклона винтовой линии, следовательно, изменение шага винта долж но Е(ыбйраться в соответствии с необ ходимым законом перемещения рапир. Ходовой винт выполнен двухзаходный ,и установлен в подшипниках. 12. Ползун состоит из полого корпуса с отверстием, через которое свободно проходит ходовой винт. В полэунё установлены два взаимно противолежащих цилиндра 13, несущих пары рол ков. Эти цилиндра расположёны сииметрично, по. одному с кажйой сторо ны ходового йинта, и каждый из цилиндров снабжен выполнеиньм с ним как одно целое хвостовиком 14 с рез бой. Своей цилиндрической поверхность хйостовики входят во втулки 15, каж ,дая из которых снабжена с одного кон ца фланцем 16, взаимодействующим с несущим ролики цилиндром, а с другой цилиндрическим опорным участком 17 с наружной резьбой. Эти участки вхо дят в крышки 18, установленные на торцах ползуна. В резьбовые отверсти выступов 19 крышек .входят втулки, а снаружи на крышках закреплены два башмака. . Втулки крепятся в крышках гайрами 20, а хвостовики и цилиндры. несущие ролики, во втулках - гайка- , ми 21. Описанная конструкция позволяет точно регулировать положение цилиндров пар роликов относительно оси ходового винта. Башмаки выполнены из антифрикционного материала и каждый из них содержит Два установочных отверстия, в. одно из которых входит трубчатый вБкзтуп крьааки, а в другое - один из двух штифтов 22, устанбвленных в части ползуна, обращенной к коромыслу. В цилиндрах жестко закреплены пары пальцев 23, тиров а иных в нап{эавлении двух расходящихся осей, расположенных под углом, равным углу между двумя боковыми сторонами витков нарезки ходового винта. На пальцах установлены с возможностью свободного вращения пары роликов, контактирующих с наружными поверхностями нарезки ходового винта. ,Механизм, изображенный на фиг, 3, содержит ползун несколько измененной конструкции. Он состоит из полого цилиндрического корпуса 24 с двумя выступами 25, расположенными с одной его стороны, в которых установлены штифты для соединения с ко- ... 1Х)мыслом. с двух концов 26 ползуна имеется резьба. В корпусе также имеется два отверстия, соосные ходовому Винту и служащие для его свободной установки. Контактирукадие с нарезкой ходового винта |хэлики установлены в дисках 27, каждый из которых закреплен в ползуне резьбOBBIM кольцом 28, обеспечйвйкадим прёдварительное поджатие роликов к нарезке ходового винта, .а также гайкой 29, навернутой на резьбу хвостовика 30, несущего ролики диска и обеспечивакячей неподвижное крепление диска в определенном положении. Между резьбовым кольцом и гайкой с каждого конца ползуна установлена опора 31, концы которой опираются йа наружную поверхность ползуна, а средняя часть неподвижно соединена с хврстобиком диска. В опоре неподвижно закреплен палец, на котором установлен ролик 32, контактирующий с направляющей 10 корпуса. С теми же направлякадими контактируют ролики 33 и 34, установленные на пальцах 35, соединяющих коромысло с ползуном. Четыре ролика 33 и 34, установленные попарно с обеих сторон ползуна, обеспечивают прямолинейное перемещение последнего под действием коромьюла. В варианте исполнения по фиг.4 наружная поверхность ходового винта и внутренняя поверхность ползуна 36 сопряжены по поСадке движения, сключающей поворот ползуна в плосости оси винта. Ползун выполнен в виде втулки, соосной ходовому винту, „снабжен двумя отверстиями, перпен-
дикулярными оси винта, в которых установлены пальцы 37 на общей оси, несущие ролики 38, выполненные в виде усеченных конусов и контактйру1ощие с нарезкой ходового винта. На других концах пальцев 37 установлены симметрично ролики 39, контактирующие с направляющими 40.
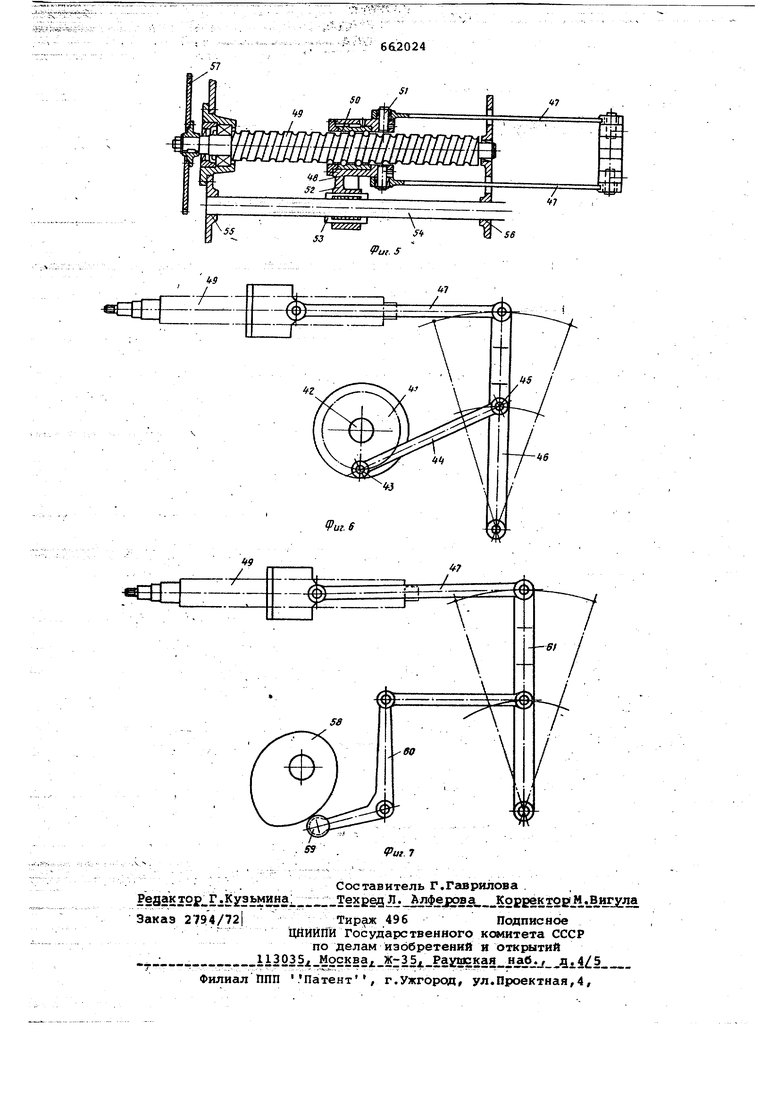
В приводе, изображенном на фиг.5 и б, кривошип 41 установлен на главном валу 42 станка и снабжен пальцем 43, с которид шарнйрно соединен сво(04 концом шатун 44. Последний другим концом шарнйрно связан с пальцем 45 коромысла 46, выполненного вильчатьм, и шарнйрно соединен с двумя шатунами 47, соединенными с ползуном 48. Этот ползун снабжен отЙ ё стием, в которое входит винт 49 и полостью, собеной этому отверстию, в полости установлена гайка 50, нап,ргшлякщая и удерживаквдая средства качения 51, выполненньге в виде шарийов или роликов; средства качения :контактируют с нарезкой гайки 50 и нарезкой ходового винта 49. Гайка 5Q жестко закреплена в ползуне 48. С выступом 52, в которюм выполнено отверстие для подшипнгвса 53 для взаимодействия со,стержнем 54 с закрепленными концами в отверстиях станины станка, ходовой винт 49 установлен в подшипниках 55 и 56 и соединен с шестерней 57.
Передача- винт-шариковая гайка может содержать не одну гайку, а две, в этом случае создается возможность регулирования зазора меящу винтом и гайками путем перемещения нажимного кольца, регулирукадего расстояние Между двумя гайками.
В механизме, изображенном на фиг. 7, на главном валу станка установлен кулачок 58, с профилем которого контактирует ролик 59, установленный йа двуплечем рычаге 60 с возможностью передачи закона движения, определяемого профилем кулачка, коромыслу 61.
Механизм, изображенный на фиг. 1, 2 работает следующим образом.
При вращении главного вала ткацкого станка кривошип 6 вращаемся вок- руг оси йала, и коромысло 2 приводит в движение ползун,8. Ввиду того, что ползун жестко связан с башмаками 9, возможность перемещения которых ограничена движением по направляющим 10, этот ползун также перемещается возвратно-поступательно по прямолинейной траектории, параллельной направляющим 10, и следовательно, по оси ходового винта 7. Дви. жение ползуна выаывает взаимодействие пар роликов 11 с нарезкой ходового винта по которой они катятся, заставляя винт вращаться под действием приложенного к нему осевого усилия.
Применение пар взаимно прилежа- , щих роликов, каждый из которых свободно вращается в соответствии со своим собственные законом движения , уменьшает проскальзывание, связанное с выполнением роликов цилиндрическими.
Врак(ениё ;ходового винта 7 передается шестерне 3 и, вследствие зацепления ее зубьевс рейкой 4, это вращение вызывает возвратно-поступательное перемещение рейки 4 и рапира 5..
Работа механизмов по фиг. 3 и 4 идентична работе описанного механизма .
Механизмы, изображенные на фиг.
5-7 работают следующим образом
Вращение от главного вала посг редством рычажной передачи передается ползуну 48, возвратио-поступателбное. перемещениекоторого посредством установленной в его полости гайки 50 со средствами качения 51 преобразуется во вращательное движение ходового винта 49. Рапира 5 соединена с ходовым винтом 49 средствами,
аналогичными в описанных выше механизмах .
Описываемый механизм меньше по габаритам, более точен, легок и менее шумен, чем известные Механизмы,
кроме того, он пригоден к работе на вкк;оких скоростях и с большим механическим КПД, причем заз.оры, ускорения и обладающие.инерцией массы, сведены в нем до минимума.
Формула .изобретения
1, Привод рапир ткацкого станка,
содержащий размещенные в корпусе и кинематически соединенные с главньм валом станка и с шеетерней рапиры профилированный элемент, установленный с возможностью вращения
и взаимодействующий с ним посредством ролика, и установленный в направляющих с возможностью возвратно-поступательного перемещения ползун, отличающийся тем, что,
с целью повьиления надежности, .ползун кинематически соединен посредством кривошипно-кбромйслЬвого механизма с главньа валом станка, а профилированный элемент выполнен в виде
ходового винта и соединен с шестерней рапиры.
2. Привод по n.l, отличающийся тем, что ползун выполнен полым, а ходовой винт установлен
внутри него свободно и выполнен
двухзаходным с переменным шагом, при этом ползун имеет по меньшей мере пару роликов, ось вращения каждого из которых параллельна касательной к витку нарезки по линии контакта
его с роликом.
7 Г/7.66.2024
3.Привод по пп,1,2,О т л и ч а ющ и и с я тем, контактирующие с направляющими опорные элементы ползуна выполнены в виде роликов,
4.Привод по п. 1, о т л и ч а ющ и и с я тему топвлэу|| выполнен
в виде втулки, внутренняя поверхность .5 которой контактирует с винтом, и имеет пару конических роликов, ось вращения которых перпендикулярна оси ходового винта.
5.Привод по П.1, о т ли ч а ю- jo W и и q я тем, что ползун имеет
8
по меньшей мере одну гайку, при этом ходо:в6й винт установлен внутри гайки и дополнительно имеет ролики, размещенные между ходовым винтом и гайкой и контактирующие с их нарезкой.
Приоритет по пунктам: .10.03.75 по пп. 1-4
20.02.76 по п . 5 .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 274989, кл.О 03 D 49/46, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТКАЦКИЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ КОСЫНОК | 1950 |
|
SU90620A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| Бесчелночный ткацкий станок | 1976 |
|
SU735682A1 |
| Привод рапиры ткацкого станка | 1983 |
|
SU1121331A1 |
| Привод рапиры ткацкого станка | 1990 |
|
SU1807118A1 |
| Привод раздвижного берда ткацкого станка | 1977 |
|
SU737524A1 |
| Привод рапиры ткацкого станка | 1986 |
|
SU1397570A1 |
| Устройство для подачи уточной нити на пневморапирном ткацком станке | 1980 |
|
SU971951A1 |
| ТОРМОЗ УТОЧНОЙ НИТИ ДЛЯ БЕСЧЕЛНОЧНЫХ ТКАЦКИХ СТАНКОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1991 |
|
RU2015221C1 |
| ТКАЦКИЙ СТАНОК С ЗАЖИМНЫМИ ПРОКЛАДЧИКАМИ | 1991 |
|
RU2051228C1 |