Изобретение относится к метеорной радиолокации и может быть использовано в метеорной астрономии, радиосвязи, синхронизации шкал времени и при измерении ветровых параметров атмосферы с помощью метеорных радаров.
Цель изобретения-повышениеэффектив- ности защиты метеорного радара от мешающих сигналов ВНЗ при сохранении частоты следования зондирующих радиоимпульсов.
Применение заявляемого способа позволяет получать непрерывные ряды регистрации метеорных ионизации при любом встречающемся в природе распределении сигналов ВНЗ по дальности. Защита от помех ВНЗ становится особенно актуальной в годы максимума солнечной активности, когда дневная регистрация метеорных следов невозможна месяцами без устройства по- давления помех.
Поставленная цель достигается тем, что для разделения метеорных сигналов от сигналов ВИЗ по разнице в задержке отраженных радиоим.пульсов относительно зондирующего, осуществляют периодическое изменение несущей частоты зондирующего сигнала (вобуляцию частоты несущей) на величину, превышающую ширину его спектра Д f и ширину полосы пропускания приемника, для чего излучают последовательность прямоугольных радиоимпульсов с периодом Тп и с дискретно изменяющейся от импульса к импульсу несущей частотой. Полный цикл излучения Тц состоит из N импульсов с различной несущей частотой, причем значение Тц выбирается из условия неналожения сигналов ВНЗ и метеорных радиоэхо:
(Л
С
00
о
и
ю
00
Tu NTn
2 Dm
ах
(1)
После излучения радиоимпульса с номе ром п и частотой несущей fn, прием отра женных метеорных радиоэхо производят в течение периода времени Тп на той же частоте fn, а перед излучением п + 1-го рэ- диоимпульса производят перестройку передатчика и приемника на частоту
fn+1-fn + lAf,(2) где 1 0, 1,2.., N 1,0,1... .
В результате чего в частотно-избирательных цепях приемника подавляются сигналы ВНЗ, порожденные n-м радиоимпульсом и имеющие значительно большую задержку во времени относительно зондирующего радиоимпульса, чем метеорное радиоэхо, и поэтому поступающие на антенну приемника уже после его перестройки на частоту fn + i. Циклы излучения Тц следуют друг за другом без пауз между ними.
Основное отличие предлагаемого способа от прототипа состоит в том, что вместо вобуляции периода повторения зондирующих импульсов применяется вобуляция частоты несущей, что позволяет не только отбраковывать отражения не удовлетворяющие условию однозначности, а эффективно подавлять их.
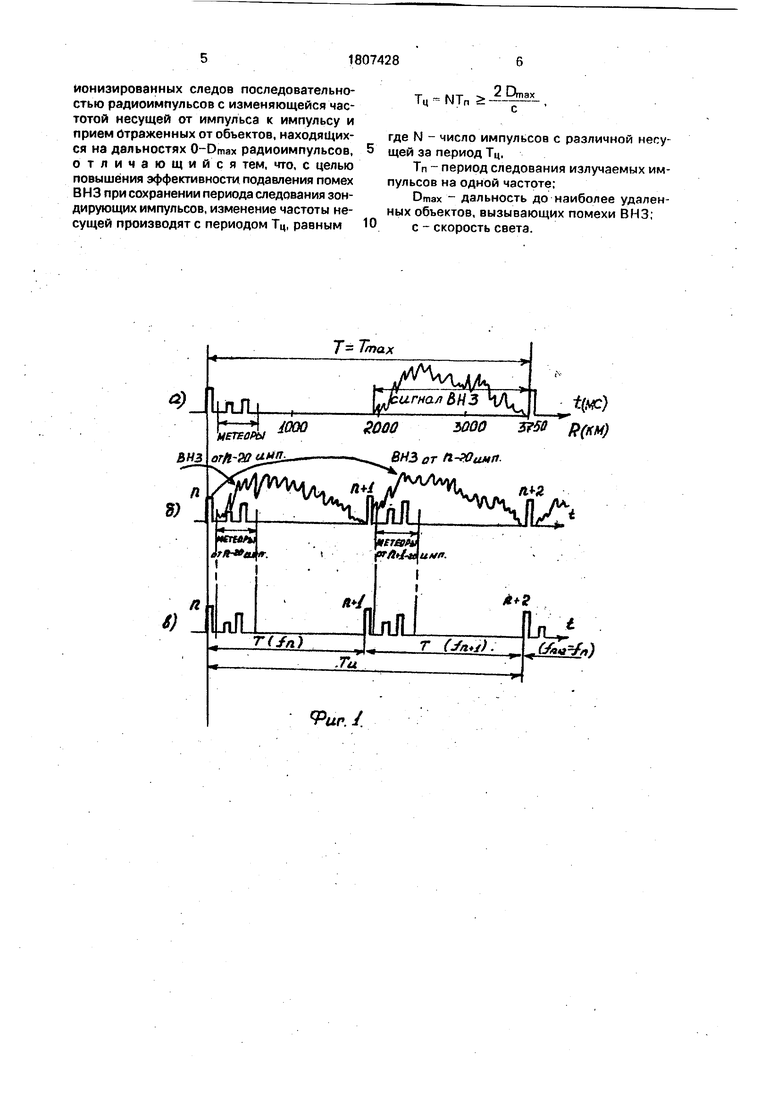
На фиг. 1,а, б, в показаны отраженные сигналы на экране электронно-лучевого индикатора радара с горизонтальной разверткой по дальности; на фиг.2 представлена функциональная схема устройства, предназначенного для технической реализации заявленного способа.
На фиг.1 ,а показаны интервалы дальности, занимаемые метеорными радиоэхо и сигналами ВНЗ, если Т 2Dmax/c. Здесь наложения этих сигналов не происходит, но частота посылок очень низкая. Экспериментальные данные показывают, что частота посылок в этом случае не должна превышать 40 Гц, что соответствует максимальной дальности сигналов ВНЗ: Dmax 3750 км. Если увеличить частоту зондирования (фиг. 1,6), то произойдет наложение метеорных радиоэхо от импульса с номером п + 1 и сигналов ВНЗ, вызванных импульсом с номером п. Чтобы избежать этого, в соответствии с предлагаемым способом применим двухчастотный режим функционирования радара (фиг.1,в). Благодаря чреспериодно- му изменению несущей частоты радара сиг- 4налы ВНЗ от предыдущего п-го импульса будут подавляться в приемнике, настроенном в это время для приема метеорных радиоэхо от п + 1-го импульса. В данном случае частота несущей всех радиоимпульсов с четными номерами равна fn, a с нечетными fn + 1. Двухчастотный режим позволяет повысить в 2 раза частоту зондирования без опасности наложения сигналов ВНЗ на метеорные. Поскольку метеорные радары, как правило, работают с частотой посылок зондирующих импульсов превышающей 200 Гц, то требуется применить N- частотный режим функционирования, где N 5.
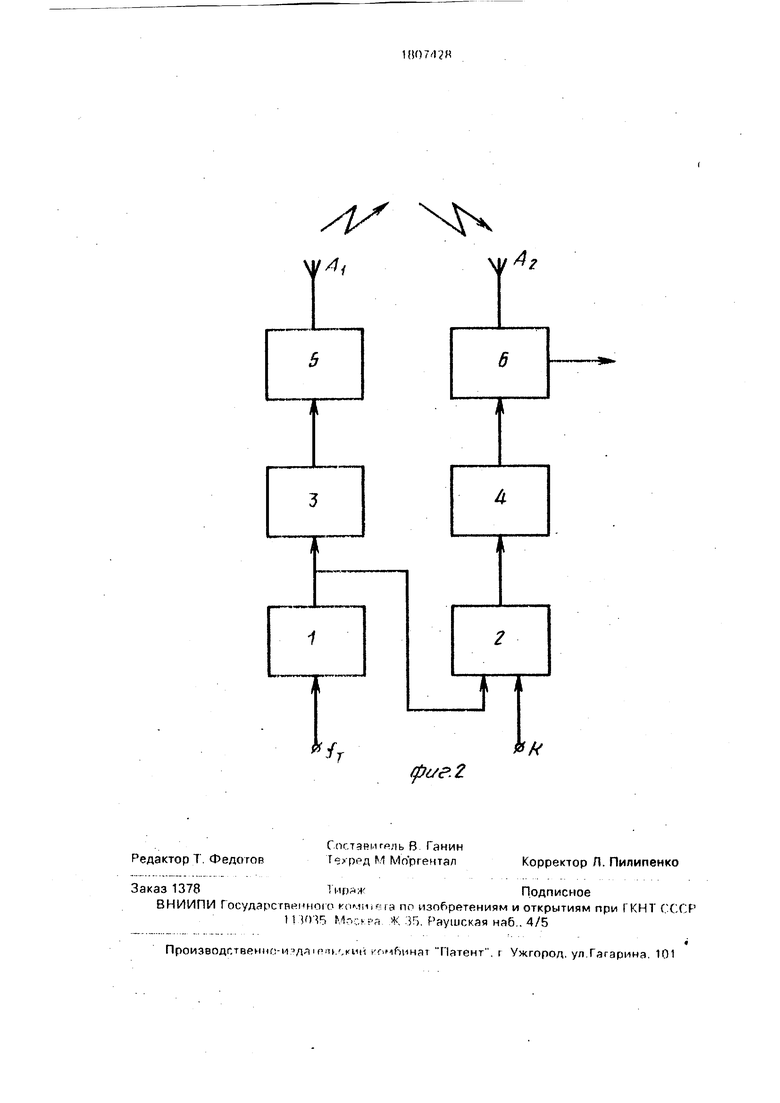
Изобретение осуществляется с помощью устройства, показанного на фиг.2.
Оно состоит из двоичного суммирующая счетчика 1, цифрового сумматора 2, синтезаторов частоты 3 и 4, импульсного радиопередатчика 5, супергетеродинного
приемника 6, передающей и приемной антенн А1 и А2.
Устройство работает следующим образом.
Импульсы fT, задающие частоту излучения зондирующих импульсов передатчика подаются на вход счетчика 1 с коэффициентом пересчета N, равным количеству различных частот несущей. Выходной код счетчика I управляет выходной частотой синтезатора
з, который служит задающим генератором передатчика 5, модулируемого импульсами fT и излучающего прямоугольные радиоимпульсы через антенну А1. Частота несущей излучаемых колебаний изменяется в соответствии с соотношением (2). Отраженные от ионизированных метеорных следов радиоэхо принимаются приемной антенной А2 и подаются на приемник б, который перестраивается путем изменения частоты гетеродина
+ k+l} fn + Af(k + l),
(3)
формируемую синтезатором частоты 4, уп- равляемым кодом со счетчика 1 после добавления к нему в сумматоре 2 константы k, связанной со значением промежуточной частоты приемника fnn соотношением:
35
пч
kAf.
Разность частот гетеродина и сигнала при одном и том же значении I всегда равна промежуточной частоте frm, на которой происходит основное усиление и частотная селекция сигнала. После детектирования, отраженные сигналы поступают на регистрирующее устройство. Степень подавления сигналов ВНЗ в данном устройстве зависит
от избирательности приемника и величины шага разноса частоты Af, который должен превышать ширину спектра зондирующего радиоимпульса. Таким образом, данное устройство принимает на интервале времени
Тг метеорные радиоэхо и с приходом каждого модулирующего сигнала ft перестраивает передатчик и приемник на соседнюю частоту, тем самым отстраиваясь от сигналов ВНЗ, приходящих позже метеорных радиоэхо.
Формулаизобретения
Способ защиты метеорного радара от помех возвратно-наклонного зондирова-. ния (ВНЗ), заключающийся в том, что производят зондирование метеорных
ионизированных следов последовательностью радиоимпульсов с изменяющейся частотой несущей от импульса к импульсу и прием Отраженных от объектов, находящихся на дальностях О-Dmax радиоимпульсов, отличающийся тем, что, с целью повышения эффективности подавления помех ВИЗ при сохранении периода следования зондирующих импульсов, изменение частоты несущей производят с периодом Тц, равным
т мт - L-Viax Тц NTn -----
где N - число импульсов с различной несущей за период Тц.
Тп - период следования излучаемых импульсов на одной частоте;
Dmax - дальность до наиболее удаленных объектов, вызывающих помехи ВИЗ;
с - скорость света.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| Способ определения параметров солнечного ветра в околоземном пространстве | 1989 |
|
SU1700505A1 |
| Способ радиолокаций метеорных ионизаций | 1988 |
|
SU1681285A1 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ АДАПТИВНОГО ОБЗОРА ЗОНЫ ДЕЙСТВИЯ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2018 |
|
RU2701377C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| ПРИЕМНО-РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО МЕТЕОРНОГО РАДИОЛОКАТОРА | 1990 |
|
SU1805753A1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
Использование:.в метеорной радиолокации. Сущность предложения: производя изменение частоты несущей с периодом 2 D™ Тц NTn и ------, что позволяет новы сить эффективность подавления помеч РОЗ вратно-наклонного зондирования, 2 ил
7 Т/пах
метяары or/l-S0 Ј
1000
Фиг./
2000ЪООО
ВИЗ or
-ч
Л+/ л/ U..
IS $ч
| Вишин Г.М | |||
| Многочастотная радиолокация, М.: Воениздат, 1973, с.54-56. |
