Коэффициент fp(k) при расчете грузоподъемности выбирается с помощью номограмм.
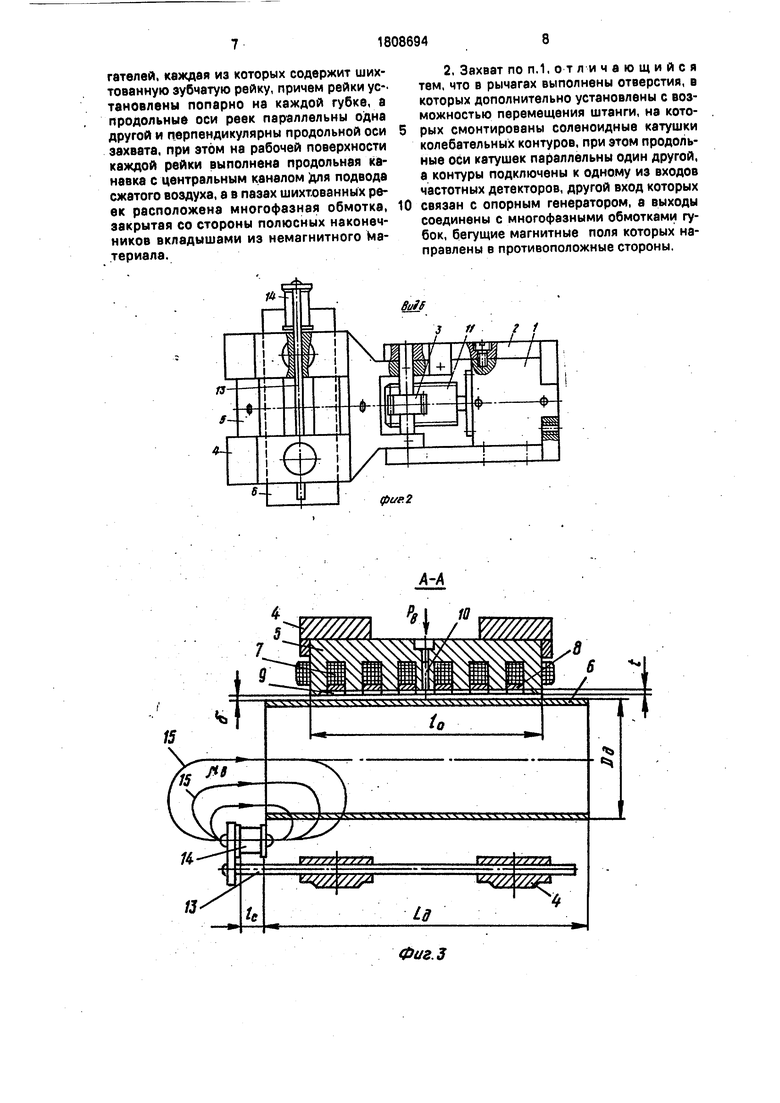
После осуществления центрирования объекта запитывают переменным трехфазным током сдвинутые по фазе на 90° обмотки губок, создавая бегущие магнитные поля, причем магнитные поля одной пары оппо- зитно расположенных губок равны по величине, но направлены навстречу магнитным полям другой пары губок, что способствует сохранению неподвижного состояния объекта захвата. Бегущие магнитные поля, взаимодействуя с тонкими стенками объекта, индуцируют в них ЭДС, под действием которых в детали возникают вихревые токи, взаимодействующие со смещающимся вдоль губок магнитным полем и создающие силу тяги F, определяемую из выражения
F«B2VSH h/5/5,
где В - значение индукции в немагнитном (воздушном)зазоре;
SH 1 - номинальное скольжение при неподвижном объекте;
г f - линейная скорость перемещения волны магнитодвижущей силы вдоль стенок объекта;
Т - период тока;
f - частота питающего тока;
г- расстояние между полюсными делениями обмоток;
h - толщина стенки объекта захвата;
р - удельное сопротивление материала объекта.
При величине 1 индукции ,4 Т (тесла) и мм допустимый зазорд 0,75 мм; при т 100 мм, 6 2,9 мм.
В случаях неравенства сил тяги F, создаваемых парами линейных двигателей, или возникновения в процессе манипулирования инерционных нагрузок на объект, приводящих к осевому смещению объекта, либо при смещении объекта под действием собственного веса при изменении углового положения захвата изменяется соотношение витков соленоидов, замкнутых магнитными потоками через -воздух и материал объекта, влекущее за собой изменение частот генерации fi и fa.
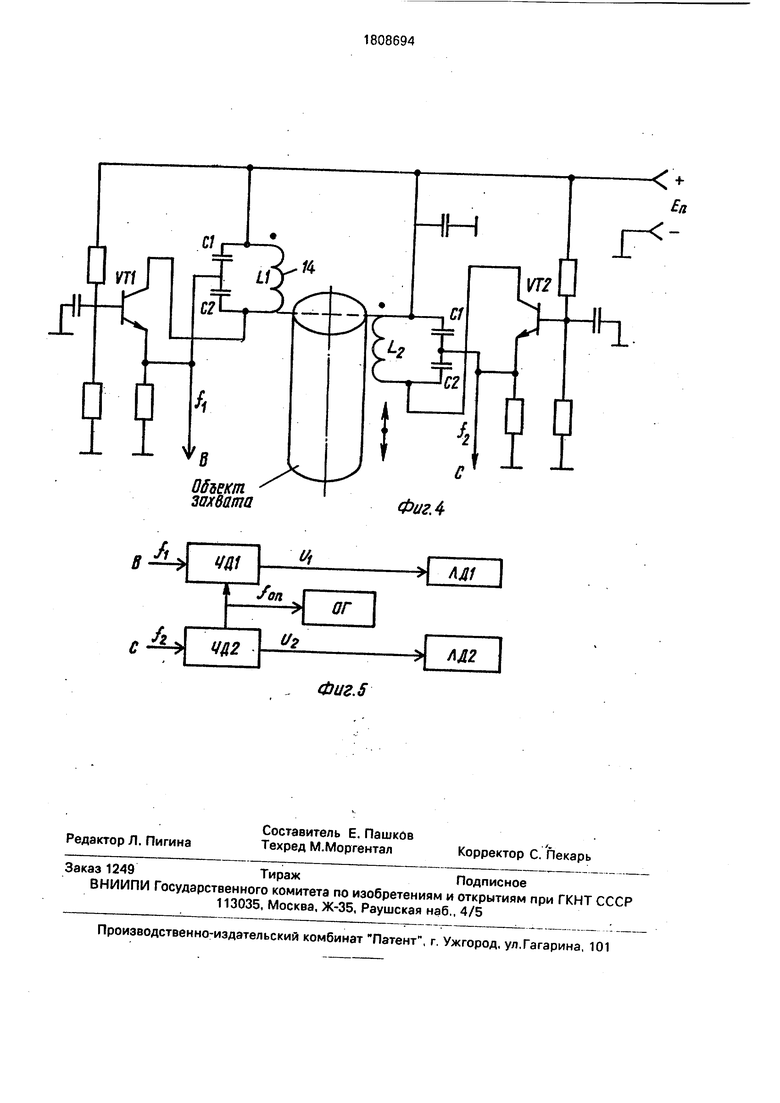
При смещении вверх (фиг.4) витки соленоида L2 остаются замкнутыми через материал объекта, поэтому La const. Часть витков соленоида Ц замыкается через материал, а часть - через воздух. В результате параметры Li и fi изменяются.
При смещении цилиндра вниз аналогичный процесс происходит в противофазе: параметры La и h изменяются, а параметры Li и fi остаются постоянными.
Таким образом, о смещениях объекта несёт информацию отклонение частоты ге- нерации от некоторого опорного (номинального) значения, либо частот fi и fa друг на друга
10
A 1 - Д fa fi-fa.
Из вышеизложенного следует, что абсолютная величина разности Afi.a характеризует абсолютную величину смещения цилиндра, а знак параметра Afi.a - направление смещения,
Преобразование параметра Afi.a в аналоговый электрический сигнал, обеспечивающий электронное управление смещения объекта, может осуществляться на базе частотного и фазового детектирования, либо путем преобразования частоты в напряжение.
Один из вариантов такого преобразования отражает структурная схема на фиг.5. С
выходов В и С генераторов на транзисторах VT1 и VT2 частоты fi и fa поступают на частотные (фазовые) детекторы ЧД1 и ЧД2, в которых происходит сравнение частот с частотой fon опорного генератора ОГ, например, с кварцевой стабилизацией частоты. Выходные напряжения Ui и Da детекторов, пропорциональные параметрам A fi fon-fi и управляют линейными двигателями ЛД1 и ЛД2. Происходящие осевые
смещения устраняются за счет увеличения тягового усилия F, создаваемого той парой линейных двигателей ЛД1 иЛД2. направление бегущих магнитных полей которых противоположно направлению смещения.
После переноса объекта в рабочую зону технологического оборудования (обрабатывающего или сборочного) изменяется по командам от системы управления робота соотношение между тяговыми усилиями линейных двигателей, что приводит к перемещению объекта в требуемом направлении, При перемещении объекта на величину, не превышающую с, т.е. на длину катушки, эти величины могут быть запрограммированы и
проконтролированы с помощью входящего в состав захвата преобразователя (фиг.4).
Формула изобретения 1. Захват для тонкостенных цилиндров, содержащий корпус, рычаги с губками и привод перемещения рычагов, отличающийся тем, что, с целью расширения технологических возможностей, губки выполнены в виде линейных асинхронных двигателей, каждая из которых содержит шихтованную зубчатую рейку, причем рейки установлены попарно на каждой губке, а продольные оси реек параллельны одна другой и перпендикулярны продольной оси захвата, при этом на рабочей поверхности каждой рейки выполнена продольная канавка с центральным каналом для подвода сжатого воздуха, а в пазах шихтованных реек расположена многофазная обмотка, закрытая со стороны полюсных наконечников вкладышами из немагнитного материала.
0
2, Захват по п.1, от ли чающийся тем, что в рычагах выполнены отверстия, в которых дополнительно установлены с возможностью перемещения штанги, на которых смонтированы соленоидные катушки колебательных контуров, при этом продольные оси катушек параллельны один другой, а контуры подключены к одному из входов частотных детекторов, другой вход которых связан с опорным генератором, а выходы соединены с многофазными обмотками губок, бегущие магнитные поля которых направлены в противоположные стороны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1798183A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Устройство для измерения скорости | 1976 |
|
SU590687A1 |
| Устройство для захвата и перемещения электропроводных материалов | 1983 |
|
SU1199584A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| СПОСОБ УСКОРЕНИЯ МАГНИТНЫХ ДИПОЛЕЙ | 2011 |
|
RU2451894C1 |
Фиг.З
В
Л
Фи г. 5
