&э
tptt&l
14372
Изобретение относится к робототехнике .
Целью изобретения является уменьшение массогабаритных показателей.
Па, фиг. 1 показан робот, общий вид на фиг, 2 вид А на фиг.1.
Промышленньш робот содержит основание 1J на котором на стойках 2 неподвижно установлена магнитная сие- Q тема с магнитопроводом 3 и обмоткаки 4, а также приводы 5 поворота и б подъема руки 7 со схватом 8. Приводы выдвижения руки и губок схвата содержат установленные па повсфотной Г1ла.т- -15 форме 9 якоря 10 и 11 двигателей, расположенные в кольцевом воздушном зазоре магнитной системы, например зубчато-реечные, преобразующие вращательное движение входного звена (шес ,Q терни) 12 в поступательное перемещение выходного звена (рейки) 13 переда™ чи. Схват 8 содержит корпус 14 со штоком 15, шарнирно связанным с губкаьш 16, при этом рейки 13 приводов вьвдви- 25 ения руки и губок 16 схвата 8 распоожены параллельно в направляющих соединены соответственно с корпусом 14 и штоком 15 схвата, .
Робот работает следуюпщм образом 30
Привод 5 служит для поворота руки 7 в горизонтальной плоскости, а привод 6 - для подъема и опускания руки, при этом робот работает в :шндрической системе координат.
Якоря Ю и 11 перемещаются в воздушном зазоре магнитной систег Ф. При подаче комавды на выдвижение руки обе шестерни 12, вращаясь с помощью якорей 10 и 11 в противополож
Q -15 ,Q 25
0
5
0
162
ныв стороны, выдвигают синхронно рейки 13 в одну сторону, в частности вь1дв:5гая руку. Взаимное положение реек 13 не нарушается, охват остается в исходном состоянии.
,Цля раскрытия губок 16 схвата 8 или их сведения при захвате рейки 13 перемещаются с различными скоростями, что приводит к смещению штока 15 относительно корпуса 14 схвата и как следствие, к сведению или разведению губок 16 в зависимости от направления относительного смещения реек 13.
Формула изобретения
Промьш1пенньш робот, содержащий установленную неподвижно на основании магнитную систему с кольцевым воздуш- зазором, в. котором расположены установленные на поворотной платформе якоря двигателей приводов выдвижения руки и губок схвата, отличающийся тем что, с уменьшения массогабаритных показателей, схват выполнен в виде корпуса и установленного в нем штока, шарнирно связанного с губками, а приводы выдвижения руки и губок схвата выполнены в виде двух передач, преобра- ЗУЮЩ1-ГХ вращательное движение входного звена, этой передачи в поступательное перемещение ее выходного звена, при этом выходные звенья передач расположены параллельно в дополнительно введенных направляющих и связаны соответственно с корпусом и штоком схвата, а входные звенья передач связаны с соответствующими якорями двигателей.
MA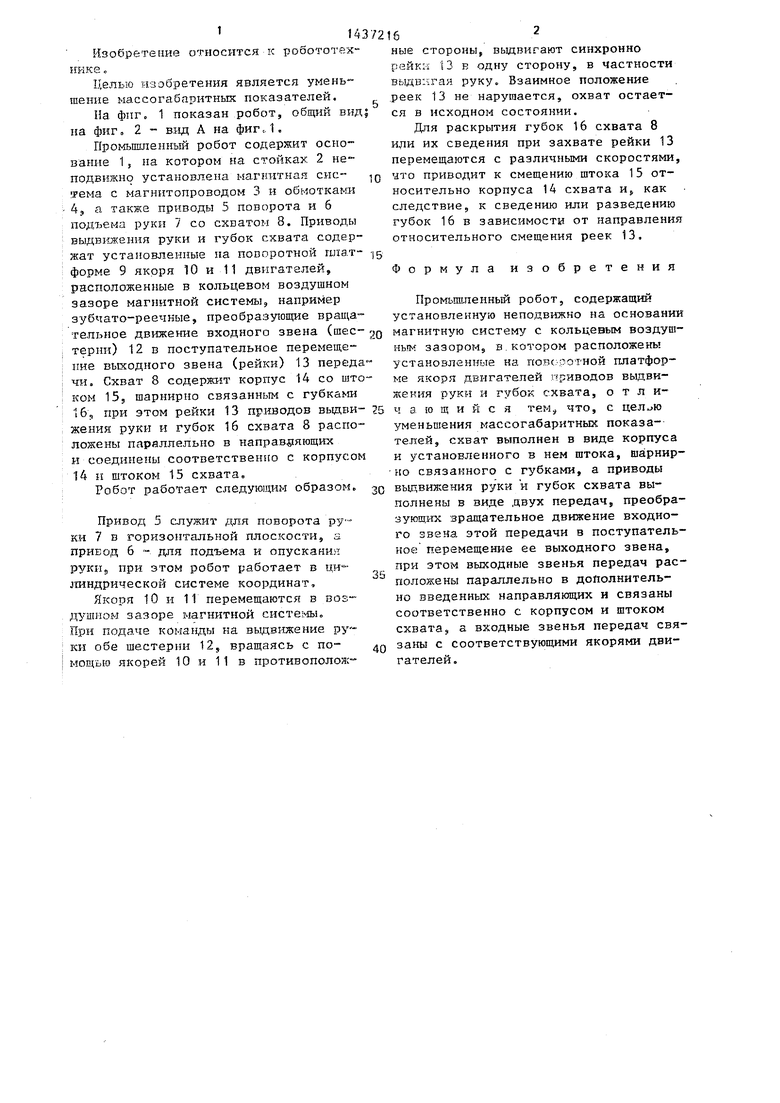
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
Изобретение относится к области робототехники. Целью изобретения является уменьшение массогабаритных показателей. Поворот руки 7 осуществляется приводом 5, а ее подъем и опускание - приводом 6, которые установлены на основании t. При этом происходит переме цение якорей приводов выдвижения руки 7 и губок схвата 8, расположенных в кольцевом воздушном зазоре магнитной системы, неподвижно установленной на основании. Для выдвижения руки 7 якоря шестерни 12, вращаясь с одинаковой скоростью, через передачу, например зубчато-реечную, синхронно перемещают рейки, одна из которых связана с корпусом, а другая - со штоком схвата, оставляя его губки в исходном состоянии. Для перемещения губок при захвате или освобождении изделия штоки перемещают с различньов скоростями. 2 ил.
rff
фиг.2
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
