(54) ЗАХВАТ ПРОМБ1ШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
. . ,1
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-тр нспор№ых, монтажно-сборочных и технологических операций, а также в дистанционных-манипуляторах, работающих в зонах радиоактивного излучения, в космосе.
Известен захват манипулятора, сод,ержащий корпус, зажимные губки, привод и суммируюший механизм 1.
Недостатком известного устройства является то, что его конструкция не позволяет вносить коррекцию в программу работы манипулятора, что снижает надежность работы последнего, особенно при больших значениях отклонений положения объекта .манипулирования от оси захвата.
Цель изобретения - обеспечение надежной ,ции объектов, неточно ориентированных относительно зажимных губок.
Поставленная цель достигается тем, что захват снабжен датчиком обратной связи, а суммирующий механизм выполнен в виде зубчато-реечной передачи, причем датчик обратной связи соединен с зубчатым колесом этой передачи.
Кроме того, привод выполнен в виде пневмоцилиндра одностороннего действ1 Я, зубчато-реечная передача расположена в корпусе пневмоцилиндра, а зубчатое, колесо этой передачи кинематически связано с поршнем пневмоцилиндра.
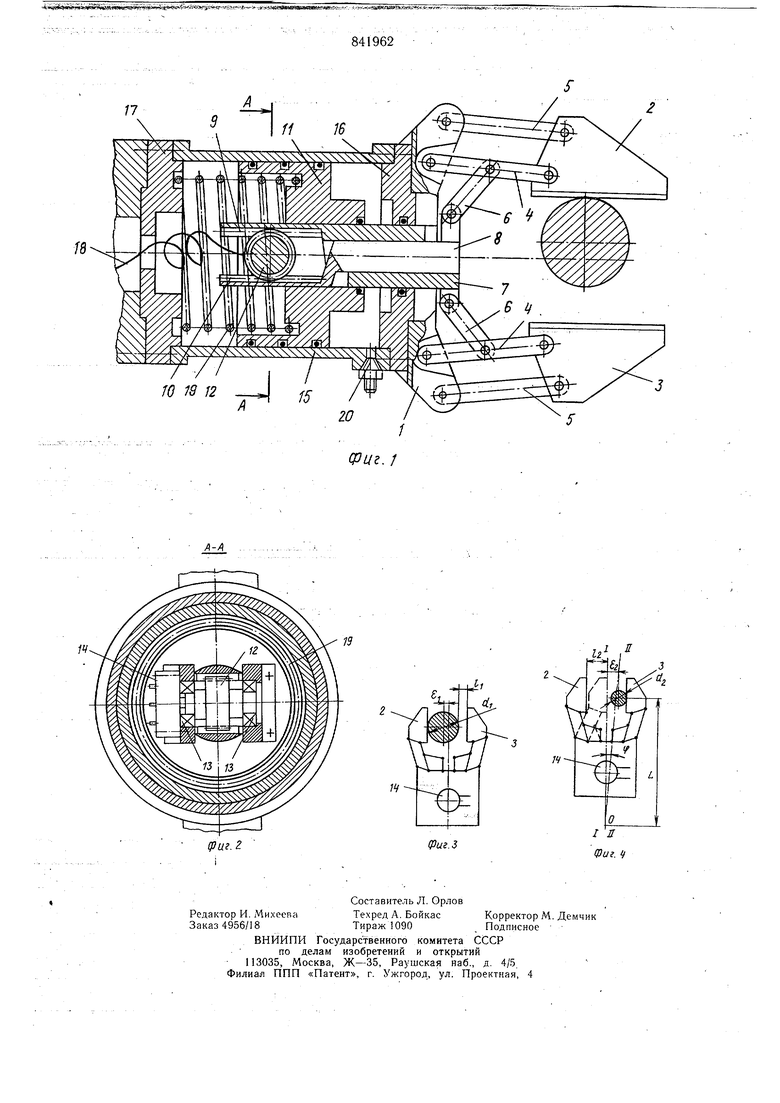
На фиг. 1 изображен захват промьмшленного робота, вид сбоку, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 -- схема захватывания предметов, несимметрично расположенных относительно зажимных губок захвата; на фиг. 4 - схема другого варианта захватывания предметов.
Захват промышленного робота состоит из корпуса,, зажимных губок 2 и 3, соединенных с корпусом 1 с помощью си.мметричных шарнирных многозвенников, выполненнь1х из ведущих звеньев 4 и тяг 5. Ведущие звенья 4 шарнирных многозвенников с помощью промежуточных рычагов 6 соединены с двумя штоками 7 и 8, концентрически расположенными друг относительно друга с возможностью перемещения, на концах которых нарезаны зубчатые рейки 9 и 10. Наружн ый шток 7 входит в силовой поршень 1 с возможностью перемещения в нем. Зубчатое колесо 12, которое входит
в зацепление с зубчатыми рейками 9 и 10, на подшипниках 13 закреплено в корпусе силового поршня 11 и кинематически сое; инено с датчиком 14 обратной связи. Привод, например яневмоцилиндр одностороннего действия 15, крепится передней стенкой 16 к корпусу 1 захвата промышленного робота. В его задней крышке 17 имеется отверстие для подвода жгута 18 к датчику 14 обратной связи. Между задней крышкой 17 и силовым поршнем 11 установлена возвратная пружина .19. В корпусе пневмоцилиндра 15 имеется штуцер 20 для подвода сжатого воздуха в рабочую полость.
Захват промышленного робота работает следуюшим образом.
Сжатый воздух, поступая через штуцер 20 в рабочую полость пневмоцилиндра, воздействует на поршень 11, который совершает рабочий ход, одновременно сжимая возвратную пружину 19. Зубчатое колесо 12, перемещаясь совместно с поршнем 11, воздействует с равным усилием на зубчатые рейки 9 и 10. Это усилие передается через штоки 7 и 8 и промежуточные рычаги 6 на ведушие звенья 4 шарнирных многозвенников, которые с тягами 5 и зажимными губками 2 и 3 образует механизмы параллелограм.мов и благодаря которым обеспечивается параллельность движения зажимных губок 2 и 3 захвата промышленного робота.-, - . .. ,
Если между губками 2 и 3 нет никакого предмета, то они сжимаются беспрепятственнои; доходя до конечного положения, останавливаются по сигналу концевых выключателей (не показаны) предельного положения зажимных губок.
В том случае, когда между губками 2 и 3 оказывается какой-нибудь предмет, расположендый симметрично относительно зажимных губок, они начинают его обжимать, при этом усилие распределяется равномерно на обе губки и они надежно схватывают манипулируемый предмет. С датчика 14 обратной связи, выполненного, например, потенциометрическим, в систему управления промышленным роботом сигнал не поступает.
В случае неточной ориентации зажимных губок относительно манипулируемого предмета одна из губок, например зажимная губка 2 (фиг. 1) касается поверхности предмета первой и останавливается: При дальнейшем перемешении nopifil w 11 пневмоцилиндра 15 зубчатое колесо 12 начинает обкатываться по неподвижно стояш.ей рейке 10 штока 8, при этом оно воздействует на зубчатую рейку 9 штока 7, промежуточный рычаг б, ведущее звено 4, тягу 5 шарнирного многозвенника и зажимную губку 3, перемещая ее с удвоенной скоростью до касания с поверхностью манипулируемого предмета, после чего происходит надежный захват этого предмета.
Датчик 14 обратной связи, соединенный с зубчатым колесом 12, при обжатии манипулируемого предмета, несимметрично расположенного относительно зажимных губок захвата, воспринимает разность относительных перемещений зубчатых реек 9 и 10 и: выдает в систему управления промышленным роботом информацию об эксцентриситете. Направление вращения датчика 14 обратной связи определяет, в какую сторону смещен от оси симметрии захвата манипулируемый предмет, а абсолютное значение величины, снимаемой с датчика обратной связи в виде, например, аналогового сигнала, соответствует расстоянию Ц (фиг. 3), равному увеличенному вдвое значению эксцентриситета S, . При этом значение эксцентриситета 5, не должно превыщать половины размера зажимаемого предмета (половины диаметра d), что обычно выполняется для машиностроения и станкостроения, так как для этих отраслей размеры деталей, перемещаемых с помощью промыщленных роботов, колеблются приблизительно от 3 до 100 мм, а точность позиционирования современных промышленных роботов составляет не более + 1,5 мм.
В том случае, если эксцентриситет расположения манипулируемого предмета относительно оси симметрии захвата превыщает половину размера этого предмета (половину диаметра валика), то одна из зажимных губок, например 3, .(фиг. 4), останавливается, коснувшись манипулируемого предмета, а вторая губка 2 перемещается до своего предельного положения. При срабатывании концевого выключателя в систему управления промышленным роботом, поступает сигнал на прекращение процесса зажатия манипулируемого предмета. С датчика 14 обратной связи в систему управления поступает сигнал, величина которого соответствует расстоянию l, равному сумме, одно из слагаемых которой равно половине диаметра - манипулируемого предмета, а второе - величине эксцентриситета . Если известен диаметр предмета, с которым манипулирует промышленный робот, то эксцентриситет определяется по формуле
S,, i-ds 12,
где -, эксцентриситет взаимного рас положения манипулируемого
предмета и захвата промыщленного робота;
-разность относительного смещения зажимных губок; oL-Диаметр манипулируемого
предмета.
В том случае, когда неизвестен размер манипулируемого предмета, например диаметр валика, и обе зажимные губки не обжимают надежно этот валик, система управления промышленным роботом путем пересчета (согласно сигналу, поступающему с датчика 14 обратной связи и соответствующему расстоянию z, и сигналу от концевого выключателя о том, что губка 2 касается упора и не зажимает надежно валик) определяет угол поворота Р захвата промыщленного робога в горизонтальной плоскости относительно центра О, равный
tg f f,
2Т
р угол поворота захвата в гогдеризонтальной плоскости; ч - расстояние от центра вращения руки работа до середины площадки зажимных губок; Pj -разность относительного смещения зажимных губок. После разжима губок и поворота захвата на угол f относительно центра О в положение II-II производится повторный зажим. Затем датчик 14 обратной выдает в систему управления значение 1, равное удвоенному значению эксцентриситета манипулируемого валика относительно нового положения II-И захвата. Эксцентриситет с зажимного валика относительно положения 1-I захвата составляет
f Ji- + li
Vo9 о
г. г
расстояния, соответствуюгдещие величинам, снимаемым с датчика обратной связи, соответственно, при первом и последующем зажимах.
Разжим зажимных губок 2 и 3 осуществляется с помощью возвратной пружины 19 после того, как из системы управления поступа ет сигнал на воздухораспределитель, который соединяет рабочую полость пневмоцилиндра 15 с атмосферой. При этом пружина 19, упираясь в заднюю крыщку 17 пневмоцилинд1)а, перемещает поршень Ни соединенное с поршнем зубчатое колесо 12 вперед. Вместе с зубчатым колесом 12 перемещаются рейки 9 и 10 со щтоками 7 и 8 и вместе с ними губки 2 и 3 захвата. Если губки находятся в положении, несимметричном относительно оси захвата, то одна из губок, например губка 2, первой касается
упора, расположенного на корпусе 1 захвата, закрепляемого на передней стенке 16 пневмоцилиндра. Перемещение рычагов 4 и 6, щтока 8 с зубчатой рейкой 10 прекращается, а перемещение рейки 9, щтока 7 и , соответственно, губки 3 происходит с удвоенной скоростью до конечного положения.
При поступлении в систему управления сигналов от двух концевых выключателей предельного положения зажимных губок и при отсутствии сигнала с датчика 14 обратной связи (сигнал поступает по проводам 18, проходящим внутри полости цилиндра и закрепленным на специальной пружинной спирали) считают, что захват находится в исходном состоянии и готов к дальнейшей работе.
Формула изобретения
механизм выполнен в виде зубчато-реечной передачи, причем датчик обратной связи соединен с зубчатым колесом этой передачи.
одностороннего действия, а зубчато-реечная передача расположена в корпусе пневмоцилиндра, причем зубчатое колесо этой передачи кинематически связано с поршнем пневт моцилиндра.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 503714, кл. В 25 J 15/00, 1974.
ГО 19 П
841962
cpuzj
