31808697 4
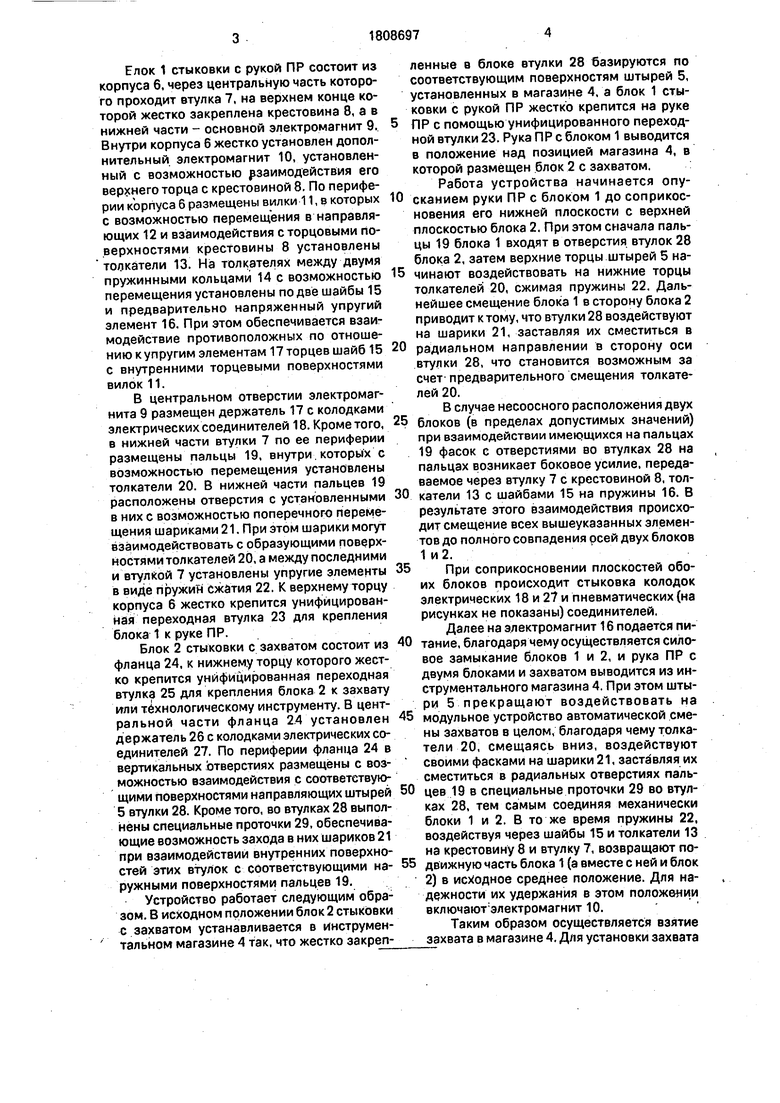
Блок 1 стыковки с рукой ПР состоит изленные в блоке втулки 28 базируются по
корпуса 6, через центральную часть которо-соответствующим поверхностям штырей 5,
го проходит втулка 7, на верхнем конце ко-установленных в магазине 4, а блок 1 стыторой жестко закреплена крестовина 8, а вковки с рукой ПР жестко крепится на руке
нижней части - основной электромагнит 9. 5ПР с помощью унифицированного переходВнутри корпуса 6 жестко установлен допол-ной втулки 23. Рука ПР с блоком 1 выводится
нительный электромагнит 10, установлен-в положение над позицией магазина 4, в
ный с возможностью взаимодействия егокоторой размещен блок .2 с захватом,
верхнего торца с крестовиной 8. По перифе-Работа устройства начинается опурии корпуса 6 размещены вилки 11, в которых 10сканием руки ПР с блоком 1 до соприкосс возможностью перемещения в направля-новения его нижней плоскости с верхней
ющих 12 и взаимодействия с торцовыми по-плоскостью блока 2. При этом сначала пальверхностями крестовины 8 установленыцы 19 блока 1 входят в отверстия втулок 28
толкатели 13. На толкателях между двумяблока 2, затем верхние торцы штырей 5 напружинными кольцами 14 с возможностью 15чинают воздействовать на нижние торцы
перемещения установлены по две шайбы 15толкателей 20, сжимая пружины 22. Дальи предварительно напряженный упругийнейшее смещение блока 1 в сторону блока 2
элемент 16. При этом обеспечивается взаи-приводит к тому, что втулки 28 воздействуют
модействие противоположных по отноше-на шарики 21, заставляя их сместиться в
ниюкупругим элементам 17торцев шайб 15 20радиальном направлении в сторону оси
с внутренними торцевыми поверхностямивтулки 28, что становится возможным за
вилок 11.счет предварительного смещения толкатеВ центральном отверстии электромаг-лей 20.
нита 9 размещен держатель 17 с колодкамиВ случае несоосного расположения двух электрических соединителей 18. Кроме того, 25блоков (в пределах допустимых значений) в нижней части втулки 7 по ее перифериипри взаимодействии имеющихся на пальцах размещены пальцы 19, внутри. которых с19 фасок с отверстиями во втулках 28 на возможностью перемещения установленыпальцах возникает боковое усилие, переда- толкатели 20. В нижней части пальцев 19ваемое через втулку 7 с крестовиной 8, тол- расположены отверстия с установленными 30катели 13 с шайбами 15 на пружины 16. В в них с возможностью поперечного переме-результате этого взаимодействия происхо- щения шариками 21. При этом шарики могутдит смещение всех вышеуказанных элемен- вЗаимодействовать с образующими поверх-то в до полного совпадения реей двух блоков ностями толкателей 20, а между последними1и2.
и втулкой 7 установлены упругие элементы 35при соприкосновении плоскостей обо- в виде пружин сжатия 22. К верхнему торцуих блоков происходит стыковка колодок корпуса б жестко крепится унифицирован-электрических 18 и 27 и пневматических (на ная переходная втулка 23 для креплениярисунках не показаны) соединителей, блока 1 к руке ПР.Далее на электромагнит 16 подается пи- Блок 2 стыковки с захватом состоит из 40тание, благодаря чему осуществляется сило- фланца 24, к нижнему торцу которого жест-вое замыкание блоков 1 и 2, и рука ПР с ко крепится унифицированная переходнаядвумя блоками и захватом выводится из ин- втулка 25 для крепления блока 2 к захватуструменталького магазина 4. При этом шты- или технологическому инструменту. В цент-ри 5 прекращают воздействовать на ральной части фланца 24 установлен 45модульное устройство автоматической сме- держатель 26 с колодками электрических со-ны захватов в целом, благодаря чему толка- единителей 27. По периферии фланца 24 втели 20, смещаясь вниз, воздействуют вертикальных отверстиях размещены с воз- своими фасками на шарики 21, заставляя их можностью взаимодействия с соответствую-сместиться в радиальных отверстиях паль- щими поверхностями направляющих штырей 50цев 19 в специальные проточки 29 во втул- 5 втулки 28. Кроме того, во втулках 28 выпол-ках 28, тем самым соединяя механически йены специальные проточки 29, обеспечива-блоки 1 и 2. В то же время пружины 22, ющие возможность захода в них шариков 21воздействуя через шайбы 15 и толкатели 13 при взаимодействий внутренних поверхно-на крестовину 8 и втулку 7, возвращают по- стей этих втулок с соответствующими на- 55движную часть блока 1 (а вместе с ней и блок ружными поверхностями пальцев 19.2) в исходное среднее положение. Для на- Устройство работает следующим обра-дежности их удержания в этом положении зом. В исходном положении блок 2 стыковкивключаюгэлектромагнит 10. с захватом устанавливается в инструмен-Таким образом осуществляется взятие тальном магазине 4 так, что жестко закреп-захвата в магазине 4. Для установки захвата
в магазин все операции осуществляются в обратном порядке.
Как видно из описания, предлагаемое устройство обладает по сравнению с прототипом следующими преимуществами:повы- шенной надежностью работы устройства автоматической смены захватов ПР за счет снижения требований к точности взаимного расположения блоков в момент стыковки, а также возможности удержания объекта ма- нипулирования при аварийном отключении привода.
Формула изобретения 1. Устройство автоматической смены за- хватов промышленных роботов (ПР) содержащее два сопрягаемых модульных блока, один из которых включает в себя корпус с расположенным в нем электромагнитом, а другой - фланец с поверхностью из магни- топроводного материала, причем оба блока имеют ответные друг другу элементы фиксации, расположенные радиально, и электропитания по оси симметрии, отличающееся тем, что, с целью повышения надежно- сти работы за счет обеспечения стыковки при взаимном несоосном расположении блоков и аварийном отключении питающей электрической сети, упомянутый корпус снабжен размещенным внутри него втулкой с крестовиной, и дополнительным электромагнитом, причем крестовина концентрич- но закреплена на втулке снаружи от нее, а корпус связан с крестовиной посредством дополнительно введенной упругой подве-
ски, при этом дополнительный электромагнит установлен в полости, образованной внутренними стенками корпуса и наружной поверхностью втулки с возможностью взаимодействия с одной из торцовых поверхностей крестовины,
2. Устройство по п. 1,отличающее-. с я тем, что упругая подвеска включает в себя четыре пальца с расположенным на каждом из них упругим элементом и кольцевыми проточками на концах пальца и установленными в проточках стопорными кольцами, причем пальцы установлены в дополнительно выполненных направляющих корпуса с возможностью ограниченного перемещения и взаимодействия своими торцами с выступами крестовины, при этом каждый упругий элемент установлен между стопорными кольцами.
3. Устройство поп.1,отличающее- с я тем, что, с целью снижения энергозатрат при стыковке, каждый из элементов фиксации выполнен в виде закрепленного на торце корпуса штыря с радиальными отверстиями в его нижней части и установленных в отверстиях с возможностью поперечного перемещения шариков, и толкателя, размещенного в пальце:с возможностью осевого перемещения и взаимодействия с шариками и упомянутым упругим элементом, при этом штырь выполнен с возможностью взаимодействия с дополнительно введенной втулкой, размещенной в упомянутом фланце и имеющей на внутренней поверхности кольцевую проточку под шарики.
Фиг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЛОКИРОВКИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО УЗЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2017 |
|
RU2651381C1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Устройство для стыковки сменного инструмента с рукой промышленного робота | 1985 |
|
SU1315305A1 |
| СПОСОБ ПРОСТАНОВКИ СТЕРЖНЕЙ В ЛИТЕЙНУЮ ФОРМУ | 2022 |
|
RU2805406C2 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕРЕВОМЕТАЛЛИЧЕСКИХ БАЛОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254229C2 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УПРАВЛЯЕМОЙ СТЫКОВКИ РАЗЪЕМНЫХ СОЕДИНИТЕЛЕЙ КОММУНИКАЦИЙ | 2009 |
|
RU2417492C2 |
| Двухзахватная механическая рука | 1977 |
|
SU659357A1 |

Фиг. 3
