Изобретение относится к навигационным измерениям и может быть использовано в судовых навигационных автоматизированных комплексах.
Цель изобретения - повышение точности автоматического определения поправки компаса в любое время суток за счет гарантированного учета текущей даты.
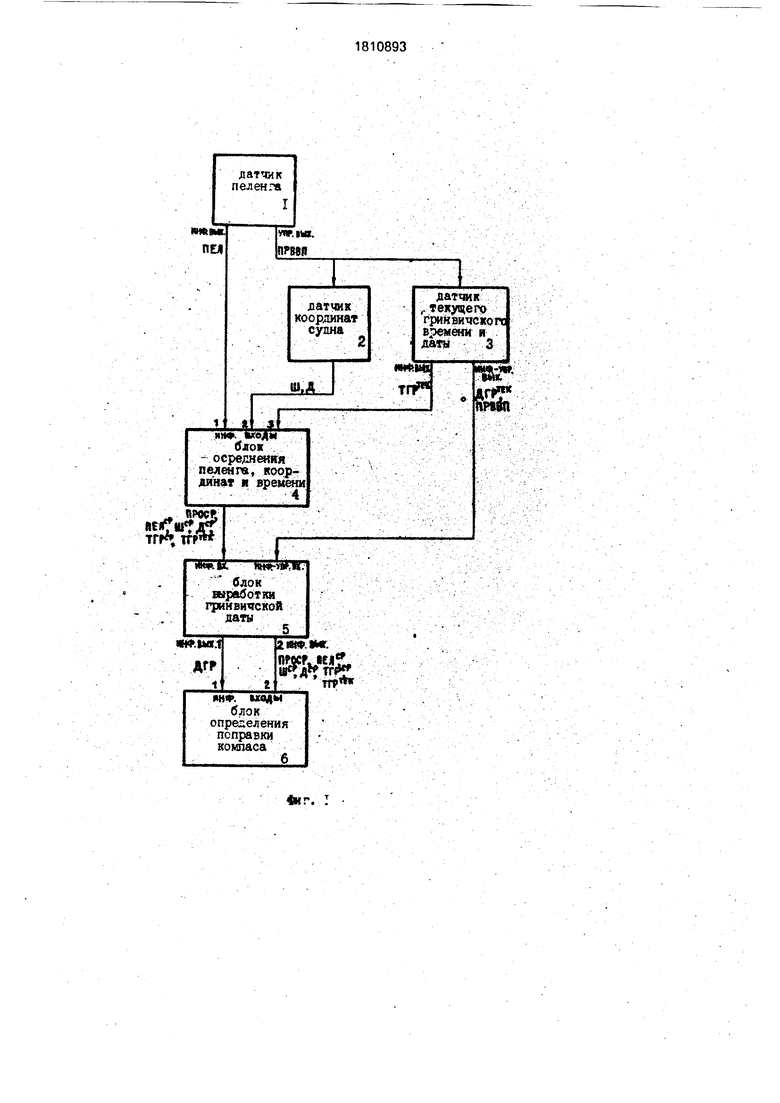
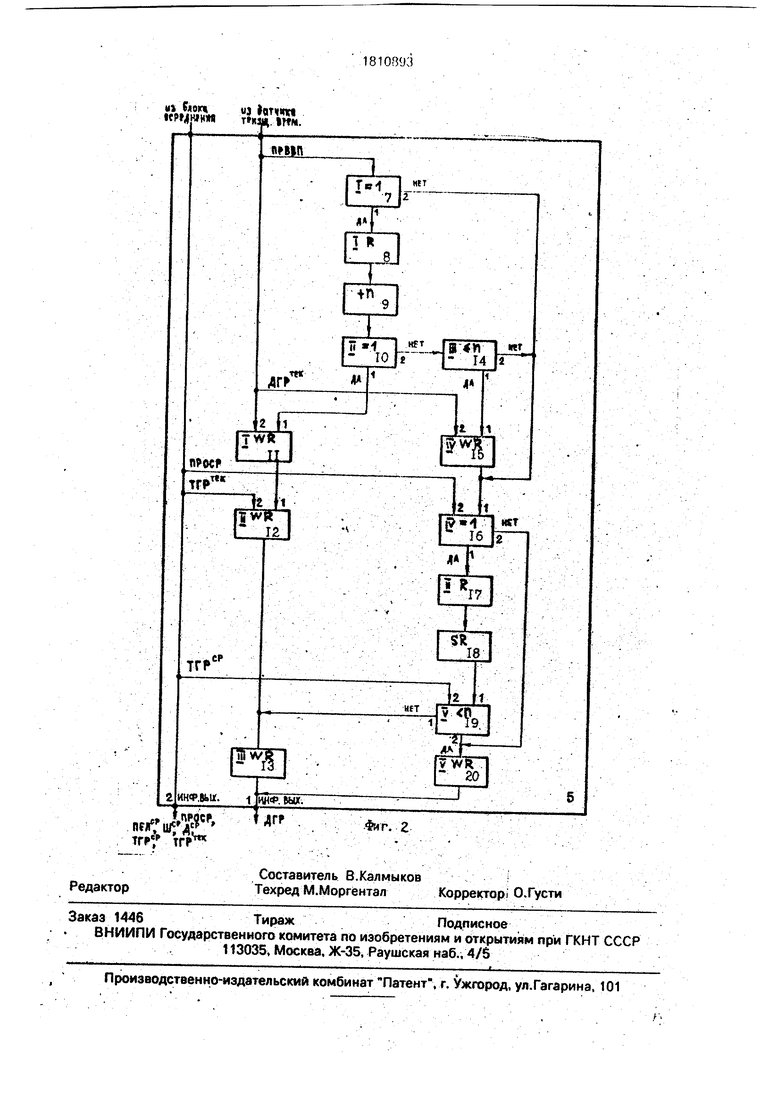
На фиг. 1 представлена структурная схема заявляемого устройства; на фиг.2 - функциональная схема заявляемого блока выработки Гринвичской даты.
Устройство автоматического определения поправки компаса содержит датчик пе- ленга, датчик координат судна 2, вход которого соединен с управляющим двунаправленным выходом датчика пеленга 1, дат- чик текущего Гринвичского времени и даты 3, вход которого соединен с управляющим двунаправленным выходом датчика пеленга 1, блок осреднения пеленга, счислимых координат и Гринвичского времени 4, первый информационный вход которого соединен с информационным выходом датчика пеленга 1, второй информационный вход - с выходом датчика координат судна 2, третий информационный вход - с информационным выходом датчика времени и даты 3, блок выработки Гринвичской даты 5, информационный вход которого соединен с выходом блока осреднения 4, а информационно-управляющий вход - с информационно-управляющим выходом датчика времени и даты 3, блок определения поправки компаса 6, информационные входы которого соединены: первый с первым информационным выходом блока выработки Гринвичской даты 5, второй - с вторым информационным его выходом. .
Блок выработки Гринвичской даты содержит первый пороговый элемент 7, на вход которого поступает значение признака
СО
о
00 Ч)
со
ввода пеленга (ПРВВП) с информационно- управляющего выхода датчика текущего Гринвичского времени и даты 3, первый элемент установки нуля 8, вход которого соединен с первым выходом первого .порогового элемента 7, счетчик 9, вход которого соединен с выходом первого элемента установки нуля 8, второй пороговый элемент 10, сое-, диненный с выходом счетчика 9, первый элемент записи 11, на второй (информационный) вход которого поступает величина дррТЕК; с информационно-управляющего выхода датчика текущегр Гринвичского времени и даты 3, а первый вход соединен с первым выходом второго порогового элемента 10, второй элемент записи 12, на второй (информационный) вход которого поступает величина с выхода блока осреднения 4, а первый вход соединен с выходом первого элемента записи 11, третий элемент записи 13, вход которого соединен с выходом второго элемента записи 12 и с первым выходом пятого порогового элемента 19, соединенных между собой через монтажное ИЛИ, а выходная величина ДГР поступает на первый информационный выход блока выработки Гринвичской Даты 5, третий пороговый элемент 14, вход которого соединен с вторым выходом второго порогового элемента 10, четвертый элемент записи 15, на второй (информационный) вход которого поступает величина ДГРТЕК с информационно-управляющего выхода датчику текущего Гринвичского времени и даты 3, а первый вход соединен с первым выходом третьего порогового элемента 14, четвертый пороговый элемент 16, на информационный вход которого поступает значение ПРОСР с выхода блока осреднения 4, а первый вход соединен с выходом четвертого элемента записи 15, с вторыми выходами первого 7 и третьего 14 пороговых элементов, соединенных между собой через монтажное ИЛИ, второй элемент установки нуля 17, соединенный с первым выходом четвертого порогового элемента 16, элемент сброса в исходное состояние 18, соединенный с выходом второго элемента установки нуля, пятый пороговый элемент 18, на .второй (информационный) вход которого поступает величина ТГРср с выхода блока осреднения 4, а первый вход соединен с выходом элемента сброса 18, пятый элемент записи 20, соединенный с вторыми выходами пятого 19 и четвертого 16 пороговых элементов, а на выходе его - значение ДГР, поступающее на первый информационный выход блока выработки Гринвичской даты 5.
Датчик пеленга 1 является серийно выпускаемым изделием типа Вега, а датчик координат судна 2 представляет собой серийно выпускаемый комплекс Бирюза СН.
Датчик текущего Гринвичского времени и даты 3 представляет собой счетчик высокостабильных кварцованных импульсов, конструктивно выполнен в виде двух бло- ков, задающего генератора меток времени и процессора.
Блок выработки Гринвичской даты 5 может быть выполнен на базе микропроцессорного комплекса серии К580 (или К1810),
позволяющего реализовать необходимые преобразования. .
Смысл работы предложенного устройства состоит в автоматическом определении поправки компаса для последующего учета
0 ее в навигационных целях..
, В судовождении измерение угловых величин производится с помощью компаса или же построенного на его основе пеленгатора. Показания компаса кроме .неизбеж5 ной инструментальной погрешности имеют еще и переменную составляющую, погрешности, которая зависит от следующих факторов; скорости движения судна, истинного курса судна, а также географической широ0 ты места судна.: ,
Для компенсации этой составляющей погрешности и производится определение поправки компаса, которая представляет собой разность между расчетным (принима5 емым за истинное) значением пеленга Солнца в месте нахождения судна в конкретное время и значением пеленга его, измеренным с помощью компаса в этом же месте в
- это же время.
Определенное таким образом значение поправки компаса выдается судоводителю на индикацию, и он доворачивает катушку компаса в нужную сторону на величину расс четной поправки и последующие показания компаса будут уже автоматически корректироваться на эту величину.
Так как параметры движения судна и его местоположение изменяются быстро; то
0 необходимо сравнительно частое определение и учет поправки компаса (по крайней мере, один раз за вахту, т.е. за 4 ч). А в связи со значительной трудоемкостью ручного определения этой поправки имеется прямой
5 смысл автоматизировать этот процесс.
Работа устройства автоматического определения поправки компаса выполняется следующим образом. Судоводитель после совмещения визира окуляра пеленгатора, который и является датчиком пеленга, с видимым краем например, нижним солнечного диска, нажимает кнопки ОПРОС Л на пеленгаторе. Снимаемое в это время значение пеленга Солнца (ПЕЛ) запоминается в ячейке памяти. В это же время признаку ввода пеленга (ПРВВП) присваивается значение Г.
Датчик координат судна и датчик текущего Гринвичского времени и даты работают независимо, и постоянно вырабатывают соответствующие параметры. В момент ручного снятия значения ПЕЛ с пеленгатора (когда значение ПРВВП равно 2) вырабатываемые в датчиках значения координат Ш, Д и текущие значения Гринвичского времени ТГРтек и даты запоминаются в соответствующие ячейки памяти.
Таким образом введенное значение компасного пеленга Солнца оказывается привязанным к месту и времени.
Описанную процедуру ручного ввода ПЕЛ и автоввода Ш.Д. ТГРГе можно повторять несколько раз, но запоминаются результаты не более 5-ти последних вводов.
В дальнейшем судоводитель может утвердить режим осреднения результатов ввода и последующее определение поправки компаса возможно как по осредненному значению, так и по одиночному пбследнему вводу.
Ф6рмул а изо бретени я
1. Устройство автоматического определения поправки компаса, содержащее датчик пеленга, соединенный . своим информационным выходом с первым информационным входом блока осреднения пеленга, координат и времени, второй и третий информационные входы которого соединены соответственно с выходами датчика координат судна и датчика текущего Гринвичского времени и даты, и блок определения поправки компаса, причем управляющий выход датчика пеленга соединен с управляющими входами датчика координат судна и датчика текущего Гринвичского времени и даты, имеющего второй выход, являющийся информационно-управляющим, отличающееся тем, что, с целью повышения точности определе0
5
0
5
0
5
0
5
0
ния поправки компаса в любое время суток, з него введены блок выработки Гринвичской даты, при этом его первый вход, являющийся информационным, соединен с выходом блока осреднения пеленга, координат и времени, второй информационно-управляющий вход соединен с вторым выходом датчика текущего Гринвичского времени и даты, а два информационных выхода соединены соответственно с первым и вторым информационными входами блока определения поправки компаса, выход которого является выходом устройства автоматического определения поправки компаса.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что блок выработки Гринвичской даты выполнен в виде последовательного соединения первогр порогового элемента, первого элемента установки нуля, первого счетчика, второго порогового элемента, первого, второго и третьего элементов записи, а также последовательного соединения третьего порогового элемента, четвертого элемента записи, четвертого порогового элемента, второго элемента установки нуля, элемента сброса в исходное состояние, пятого порогового элемента и пятого элемента записи, причем первый вход четвертого порогового элемента соединен также с вторыми выходами первого и третьего пороговых элементов, а второй выход соединен также с входом пятого элемента записи, второй выход второго порогового элемента соеди- «нен с входом третьего порогового элемента, а первый выход пятого порогового элемента соединен с входом третьего элемента записи, при этом первым информационным входом блока выработки Гринвичской даты являются объединенные вторые входы четвертого и пятого пороговых элементов, а также второго элемента записи, вторым информационным управляющим входом блока выработки Гринвичской даты являются объединенные вход первого порогового элемента и вторые входы первого и четвертого элементов записи, первым информационным выходом блока выработки Гринвичской даты являются объединенные выходы третьего и пятого элементов записи, а второй информационный выход объединен с первым информационным входом блока.
датчик
пеленге
I
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ РАДИОЛОКАЦИОННЫЕ СИГНАЛЫ КОРАБЕЛЬНОГО РАДИОЛОКАТОРА, ОТРАЖЕННЫЕ ОТ БЕРЕГА | 2007 |
|
RU2369910C2 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ СИГНАЛЫ ОБЗОРНОЙ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ОТРАЖЕННЫЕ ОТ БЕРЕГОВОЙ ЛИНИИ | 2005 |
|
RU2303795C2 |
| ПРИЕМОИНДИКАТОР РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027196C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| ГЕНЕРАТОР ФЛЮКТУИРУЮЩИХ СИГНАЛОВ ЦЕЛЕЙ | 2002 |
|
RU2253129C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| Гироскопическое устройство для определения курса | 1989 |
|
SU1783302A1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
Устройство относится к навигации и может быть использовано в судовождении. Устройство обеспечивает повышение точности автоматического определения поправки компаса в любое время суток на 15- 25% за счет гарантированного учета гринвичской даты. Это достигается введением в схему прототипа блока выработки Гринвичской даты, в котором значение даты определяется по значению осредненного Гринвичского времени нескольких измерений пеленга Солнца. 2 ил..
MHttMLj
ПМ
УОР.1Ш.
ПРВВП
датчик
координат
супна
Ш.Д
ИНФ. ЬД
блок - осреднения пеленге, координат и времени1
&
ТГР TfpST
wmtt
1(5лок
выработки гринвичской дате
5
тфГмиг. nfjCfjttl. lefA1 w &
TTV
«Н4.
блок
определения поправки компаса
6
«иг. I
датчик .,. текущего
ГрИНВИЧСКОРЬ
времени и дата 3
iw«wi Tlf
л
| Мордвинов Б.Г | |||
| и др | |||
| Средства навигации малых судов | |||
| Л.: Судостроение, 1986 | |||
| Вагушенко Л.Л., Стафеев В.М | |||
| Судовые автоматизированные системы навигации | |||
| М., Транспорт, 1989, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
