ел
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дозатором суспензии | 1989 |
|
SU1631296A1 |
| Устройство управления дозатором | 1984 |
|
SU1206755A1 |
| Автоматическая транспортно-дозировочная линия для жидких химикатов | 1978 |
|
SU742889A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Дозатор | 1988 |
|
SU1696876A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДНОЙ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ТРАКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582486C1 |
| Пневматическое устройство для управления дозированием жидкости | 1982 |
|
SU1062653A1 |
| Двухканальная система топливопитания и регулирования газотурбинного двигателя | 2019 |
|
RU2700989C1 |
| Устройство для дозирования жидких химикатов | 1980 |
|
SU954960A2 |
Использование: дозирование жидкости. Сущность изобретения: жидкость засасывается из расходной емкости через клапаны в мерную камеру при перемещении вытесняющего элемента под действием привода, мембрана которого связана через шток, кулачок и храповое колесо с шаговым приводом в виде пневмокамеры с мембраной. При растяжении вытесняющего элемента доза жидкости через клапаны выдается в приемную емкость. Устройство содержит блок управления, задатчики давления, датчик Давления, пневмоэлемент Повторитель давления со сдвигом и коммутаторы, камера привода разделена мембраной на две части. Шаговый привод подключен к первому входу блока управления. Коммутаторы подключены к соответственным частями камеры, а датчик давления - к приемной емкости. 1 з.п.ф-лы, 1 ил.
Изобретение относится к области дозирующих устройств для жидкостей и может быть использовано в химической, нефтехимической, химико-фармацевтической и смежных отраслях промышленности для порционной и равномерной (квазинепрерывной) выдачи доз жидких сред.
Актуальной задачей является расширение функциональных возможностей дозирующего устройства.
Сущность изобретения заключается в том, что в дозирующее устройство введены: камера, разделенная мембраной на две изолированные части, два задатчика давления, два коммутатора, датчик давления и пнев- мозлемёнт Повторитель давления со сдвигом, причем вытесняющий элемент жестко соединен с одной стороной мембраны, а Шаговый привод - с ее другой стороной, вход датчика давления соединен с приемной ёмкостью, а его выход через элемент Повторитель давления со сдвигом подключен к первому входу первого коммутатора, ко второму входу которого подключен первый за датчик давления, а к третьему входу - второй выход блока управления, выход первого коммутатора соединен с частью камеры, изолированной мембраной от вытесняющего элемента, а с другой частью камеры соединен выход второго коммутатора, первый и второй входы которого соединены соответственно со вторым задатчиком
00
ю
4V СО
ю
давления и третьим выходом блока управления.
Введение вышеприведенных элементов в дозирующее устройство в совокупности представленных взаимосвязей позволяет реализовать практически все возможные режимы импульсного дозирования: квазинеярерывный, счетно-импульсный, выдачу отдельных порций, дозирование по заданной программе от ЭВМ, а также позволяет осуществить быстрое переключение программ с одного режима дозирования на другой.
Введение отрицательной обратной связи в камеру мембранного привода с противоположной стороны от вытесняющего элемента для компенсации противодавления в напорной линии позволяет осуществить дозированмё в линию нагнетания с повышенным давлением (Р 5: 1 МПа) без увеличения габаритов устройства. Обратная связь осуществляется с помощью датчика давления и пневмоэлемента Повторителя давления со сдвигом.-; ;
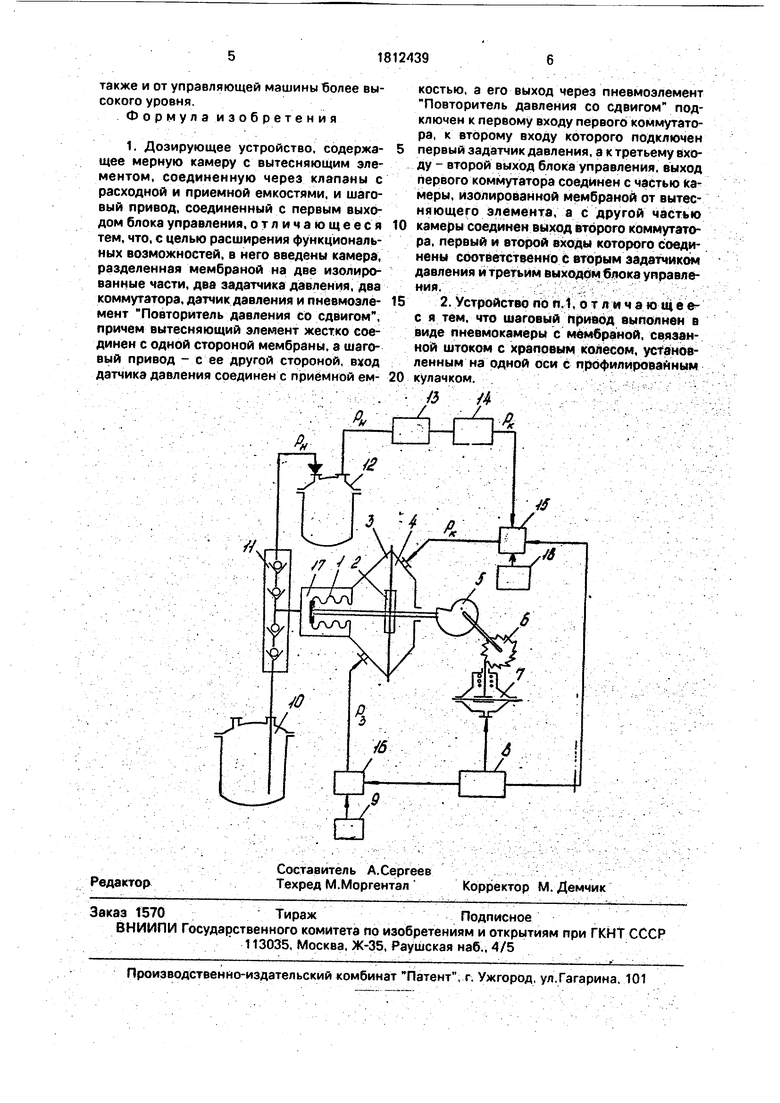
На чертеже представлена структурная схема реализации дозирующего устройства на примере с сильфонным вытесняющим элементом.
Дозирующее устройство содержит сильфонный вытесняющий элемент 1 (сияь- фон), мембрану 2, камеру 3 со стороны вытесняющего элемента, камеру 4 со стороны шагового привода, кулачок 5, храповый механизм 6, шаговый пневмопривод 7, блок управления 8 (БУ), эадатчик давления 9 (ЗД2) на возврат вытесняющего элемента, расходную емкость 10{ИЕ), клапаны 11, приемную емкость 12 (ЛЕ), датчик давления 13 (измерительный преобразователь ИЛ), пневмоэлемент Повторитель давления со сдвигом t4 (Л С), коммутаторы 15 (К1) и 16 (К2), мерную камеру 17, а также задатчик давления 18 (ЗД2) на выдачу дозы в порционном режиме.
Дозирующее устройство работает следующим образом.
В квазинёпрерывном режиме неОре- рйвное дозирование жидкости осуществляется, серией импульсов, подаваемых на шаговый пневмопривод 7, воздействующий на храповый механизм 6, приводящий в движение кулачок 5 и вытесняющий элемент 1, который с постоянной средней скоростью вытесняет дозу. Для этого коммутатор (К1) производит отключение первого задатчика давления 18 (ЗД1) от камеры 4 и подключает к камере 4 цепь, вырабатывающую сигнал коррекции (обратной связи со знаком И)- который компенсирует действие давления нагнетания Рн. Цепь, состоящая из датчика
давления 13 (ИП)и пневноэлемента Повторителя давления со сдвигом 14 (ПС), формирует корректирующий сигнал обратной связи РК, пропорциональный давлению нагнетания Рн и усилию от деформации силь- фонного вытесняющего элемента 1. Компенсация напорного давления Рн сигналом обратной связи РК производится вычитанием на мембране 2 путем подачи его в
противоположную камеру 4. Повторителем давления со сдвигом 14 устанавливается начальное смещение сигнала обратной связи РК, пропорциональное усилию сильфон- ного элемента 1 в крайнем его положении.
5 Компенсация напорного давления сигналом обратной связи позволяет применять предлагаемое устройство для создания в напрр- ной линии (на выходе дозатора) повышенного давления (до 10 МПа и более)
0 без изменения конструкции и мощности шагового привода.
Возврат сильфонного вытесняющего элемента 1 производится следующим образом. Коммутатор 16 (К2) по сигналу блока
5 управления 8 (БУ) подключает второй задат- чик давления 9 (ЗД2), который формирует давление, и подает его в камеру 3 на возврат сильфонного вытесняющего элемента 1 в исходное положение; при этом производит0 ея всасывание дозы в мерную камеру 17. На шаговый привод 7 импульсные сигналы в процессе всасывания не подаётся, а коммутатор 15 отключает подачу сигнала обратной связи РК в камеру 4 и после набора дозы
5 в Мерную камеру 17 блок управления 8 (БУ) отключает ЗД2 (9) от камеры 3 и подает серию импульсов на шаговый пневмопривод 7 для вытеснения очередной дозы. Далее процесс повторяется непрерывно.
0 8 порционном режиме для осуществления набора дозы БУ 8 подает командный сигнал на коммутатор 16 (К2). который соединяет задатчик 9 (ЗД2) с камерой 3. давление в соответствий с командным сигналом
5 от БУ 8 подается в камеру 3 и мембрана 2 перемещает сильфом 1 и происходит всасывание порции в мерную камеру 17. Для выдачи дозы БУ 8 производит отключение канала подачи сигнала от обратной связи
0 РК от камеры 4 переключением коммутатора 15 (К1). Давление в соответствии с командным сигналом от ВУ 8 подается от первого задатчика давления 18 (ЗД1) в камеру 4. и привод 2 перемещает сил ьфон влево (по
5 чертежу) для вытеснения порции из мерной камеры 17.
В счетно-импульсном режиме БУ 8 выдаёт команды на подачу порций в зависимости от реализуемой программы. Управление выбором режима может осуществляться
также и от управляющей машины более высокого уровня.
Формула изобретения
первый задатчик давления, а к третьему входу - второй выход блока управления, выход первого коммутатора соединен с частью камеры, изолированной мембраной от вытесняющего элемента, а с другой частью
камеры соединен выход второго коммутатора, первый и второй входы которого соединены соответственно с вторым задатчиком давления и третьим выходомi блока управления.-:;1- ; --v- 4 ;: . : . . ..-: ;: ; .
кулачком.- J .
а - м ;-:.: ,:. o.v ..: ...д.;
L
| Авилов А.Г | |||
| и др | |||
| Автоматические дозаторы для жидкости | |||
| М.: Энергия | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
