Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов.
Цель изобретения - повышение надежности схвата путем увеличения мощности электромагнита, улучшения выходного сигнала датчика веса и введение режима принудительногоразмагничиваниясердечника, а также расширение функциональных возможностей путем организации гибкого цикл, за счет автоматического контроля всех возможных состояний схвата.
На чертеже изображен электромагнитный схват.
Электромагнитный схват состоит из закрепленного на руке манипулятора 1, корпуса 2, внутри которого установлен датчик веса 3 с подвешенной на сердечнике 4 катушкой возбуждения 5 электромагнита. Вторая катушка возбуждения 6 электромагнита закреплена в корпусе 2 соосно с катушкой 5 и с зазором охватывает ее вместе с сердечником 4, взаимодействующим с деталями 7. Датчик веса 3 соединен через усили- тель тока 8 по параллельной схеме с входами трех компараторов 9-11, каждый из которых вторым входом соединен с соответствующим потенциометром 12-14 опорного напряжения Uorn - Uona. а выходом с входами 15. 16 и 17 блока управления 18.
Внешняя катушка возбуждения 6 соединена линией питания с выходом 19 блока управления 18, а внутренняя катушка возбуждения 5 соединена с выходами 20-22 блока управления 18 тремя параллельными линиями питания: первой непосредственно с выходом 20, второй - с выходом 21 через генератор убывающего тока 23 и третьей - с выходом 22 через генератор симметричных прямоугольных импульсов 24.
Схват работает следующим образом. Вначале производится настройка схвата на работу с заданными деталями 7 с помощью потенциометров 12-14, которыми выставляются опорные напряжения Uoni - Uons, такой величины, чтобы на выходе компараторов 9-11 устанавливались сигналы высокого уровня при следующих условиях: у компаратора 9 - при касании сердечником 4 схвата поверхности деталей 7, у компаратора 10 - при наличии на сердечнике 4 схвата двух и более деталей; у компаратора 11 - при наличии на сердечнике 4 схвата только одной детали.
Сигналы низкого уровня устанавливаются на выходе компараторов при невыполнении этих условий. Затем работа схвата осуществляется в автоматическом режиме
по программе, содержащейся в блоке управления 18.
По команде блока управления схват опускается манипулятором 1 вниз с обесточенными катушками возбуждения 5 и б до соприкосновения его сердечника 4 с поверхностью деталей.7. находящихся в таре (не показана). В момент касания с датчика веса 3, установленного внутри корпуса 2, выдается сигнал на вход усилителя тока 8 и после усиления сравнивается в компараторах 9- 11с заданными опорными напряжениями Uom - и0пз. на потенциометрах 12-14. В результате сравнения на выходе компаратора
g появляется сигнал высокого уровня, который поступает на вход 15 блока управления 18. При этом блок управления выдает команду манипулятору 1 на прекращение опускания схвата и включает на выходах 19 и 20
напряжение питания катушек возбуждения 5 и б электромагнита. В результате на сердечнике 4 электромагнита устанавливается максимальное магнитное поле, которым к нему притягиваются детали и происходит их
захват. После этого манипулятор 1 поднимает схватом детали в верхнее положение, а блок управления 18 выключает питание катушки возбуждения 6 и анализирует уровень сигналов на входах 15-17,
поступающих с компараторов 9-11. При этом возможны три следующих комбинации сигналов.
На входах 15-17 сигналы низкого уровня, что соответствует режиму отсутствия деталей на схвате. В этом случае блок управления 18 дает команду манипулятору 1 на повторный захват деталей из тары.
На входе 17 - сигнал высокого уровня, а на входах 15 и 16 - низкого уровня, что
соответствует наличию на схвате одной детали. В этом случае по команде блока управления 18 включается напряжение питания с выхода 19, которое подается на катушку возбуждения 6 и на схвате устанавливается
максимальная магнитная сила, которая надежно удерживает деталь при перемещении ее манипулятором и зону сброса.
На входах 16 и 17 сигналы высокого уровня, а на выходе 15 - низкого уровня, что
соответствует наличию на схвате нескольких деталей, В этом случае блок управления 18 включает выход 21 и подает на катушку возбуждения 5 питание с генератора убывающего тока 23, отключая одновременно питание с выхода 20. При этом линейно уменьшается магнитная сила схвата. И лишние детали отпадают с него до тех пор пока не останется одна, и на выходе 16 исчезнет сигнал высокого уровня, что служит командои блоку управления на подачу питания в катушку возбуждения 5 с выхода 20 и отключение питания с выхода 21 и генератора убывающего тока 23. При этом магнитная сила охвата возрастает и оставшаяся деталь удерживается им. Для надежного переноса детали подается с выхода 19 блока управления питание на катушку возбуждения 6 и деталь при переносе надежно удерживается на схвате максимальной магнитной силой.
Сброс схватом детали 7 осуществляется отключением питания катушек возбуждения 5 и 6 блоком управления 18 при контроле уровня сигнала на его входе 17. Если при обесточенных катушках в режиме сброса на входе 17 сохраняется сигнал высокого уровня, что блоком управления 18 через выход 22 включается питание на катушку возбуждения 5 с генератора симметричных прямо- угольных импульсов 24, которыми сердечник 4 перемагничивается и в момент прохождения через нулевое значение происходит отлипание и сброс детали.
Дальнейшая работа схвата осуществляется по уже описанной схеме.
Применение изобретения позволяет автоматизировать процесс поштучной выдачи из тары ферромагнитных деталей различной формы и типоразмеров, а также повысить надежность схвата.
Формула изобретения Электромагнитный захват, содержащий
корпус с закрепленным на нем датчиком веса, на котором установлен сердечник с катушкой возбуждения, усилитель тока, генератор убывающего тока, компараторы, потенциометры опорных напряжений, о тличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, он снабжен блоком управления, генератором симметричных прямоугольных импульсов и второй катушкой возбуждения, которая закреплена в корпусе соосно с катушкой на датчике веса, охватывая ее с зазором, и соединена линией питания с выходом блока управления, последний тремя выходами соединен по параллельной схеме с внутренней катушкой возбуждения, причем одной линией питания напрямую, второй - через генератор убывающего тока и третьей - через генератор симметричных прямоугольных импульсов, при этом входы блока управления соединены с выходами трех компараторов, каждый из которых соединен одним своим входом по параллельной схеме через усилитель тока с датчиком веса, а другим входом с потенциометром опорного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Электромагнитный схват | 1984 |
|
SU1220795A1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Способ управления манипулятором промышленного робота | 1991 |
|
SU1815209A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Способ определения некачественной сборки | 1989 |
|
SU1639938A1 |
| Электромагнитное захватное устройство манипулятора | 1988 |
|
SU1641611A1 |
| Способ настройки электромагнитного схвата и устройство для его осуществления | 1987 |
|
SU1518116A1 |
Использование: для автоматизации процессов поштучной выдачи из бункера фер- ромагнитны-х деталей. Сущность изобретения: схват содержит две катушки возбуждения 5 и 6 электромагнита, причем атушка 5 на сердечнике 4 подвешена к датчику веса 3, а катушка 6 закреплена на корпусе 2 с катушкой 5 и с зазором охватывает ее вместе с сердечником. В процессе работы манипулятором 1 схват опускается в тару до контакта с деталями, после чего включаются две катушки возбуждения 5 и 6 электромагнита, детали притягиваются максимальной магнитной силой, поднимаются на схвате манипулятором 1 е верхнее положение и питание катушки 6 отключается. Надежный сброс со схвата лишних деталей и одной оставшейся в зоне выгрузки обеспечивается параллельным включением в цепь памяти катушки 5 генератора убывающего тока 23 и генератора симметричных прямоугольных импульсов 24. 1 ил. 1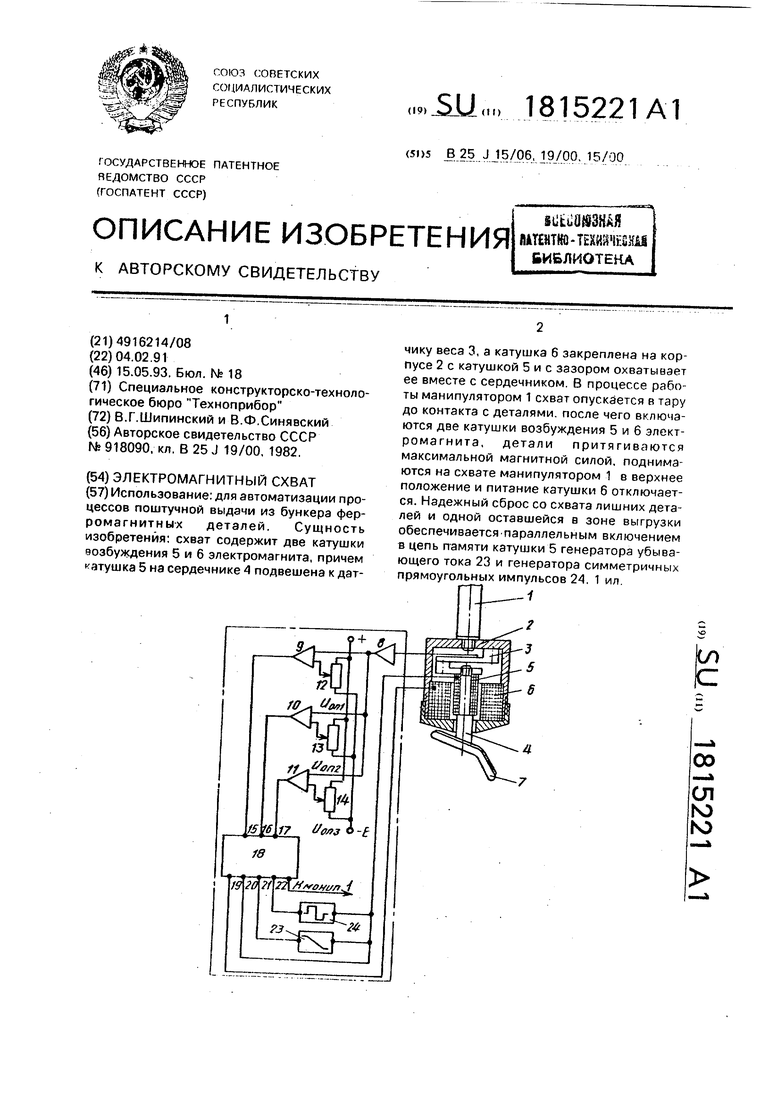
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
