Ичо1ч)РТ1М1И( огпгхчггся к м;И11ИН()- c/riKieII 111(1 к dbn (, nciioj i.:uin .чнс и роГ)(1Т()тех11ически : комплексах и гибких проичподгтпрнимх системах.
UfJib И зоб 1стения - jiaciiiiipeHHe фум кциона.пьных позможиос:те1 1 элсктромл г- иитиого схлата путем чахпата и удер- жапил пеоГ)ходим( 11-о колнчестна листо- пых доталер.
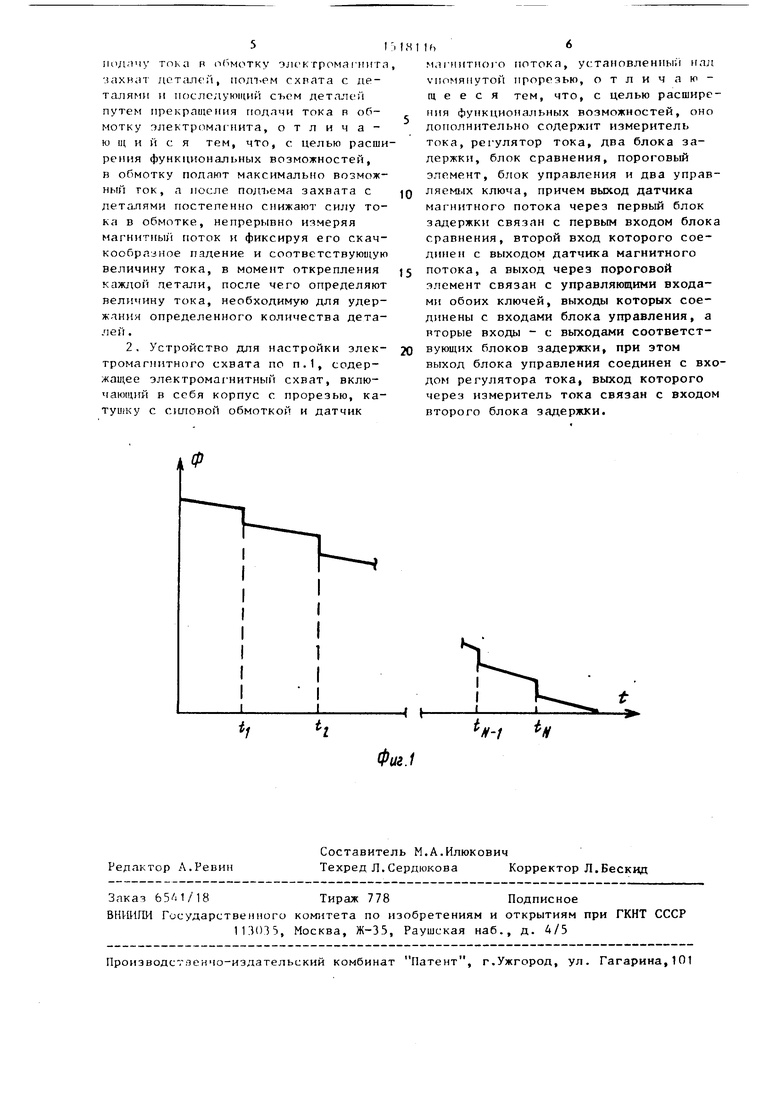
На ij iir .l покачана чависимость величины магнитного потока от премени, на фиг. 2 - элоктромагнитпьг; схват и принцИ1П1альнал схема управлении.
СпосоГ) HacTpoi fKH электромагнитног схвата заключается в том, что схват подводят к стопке листовых магнито- проводящих дотале, после чего в обмотку подают максимально возможны иостояпнмй ток. Схват с-, захваченными N деталями приподнимают над оставшейся част1)1о стопки, после чего постепенно силу тока в обмотке до нуля, измеряя при этом магнитный поток через электромагнит. За счет снижения силы тока притяг ивание деталей к схпату постепенно ослабевает
В момент времени С,открывается первая снизу деталь и падает обратно п стопку, в момент времени t .- отрывается вторая деталь, в момент ирем(М1и t отрывается носл едняч М-я детапь, В монент отрыва каж;;ой детаги нроие- ходи г скачкообразное yfiejni4eHne магнитного сопротивления удержилаемых деталеГ;, что приводи г к соответствующему ум1М1Ы1;е1И1ю ма1ЧП1тного потока (фиг.1). В MOMeHTii скачкообразно1 о падения ма -нитно1 о потока запоминают соответствующую величину тока. В результате опрелеляют величину тока, необходимую лля удерживания определенного количества деталей. Для удерживания К д.еталеГ ток в обмотке электромаг нита должен быть , чем ток в момент Яремени LN- i о больше, чем ток в момент времени tf., . Ксли, кроме того, известна ма|Л1итная проницаемость и у/хельньи вес деталей в предткхчпжении, что они Bbinojnieiii, ия одина1:о оI o материапа, то могут быть определены толщина и вес летали.
0
5
0
5
0
5
0
В корпусе 1 над обмотко 3 ри.ншлнен паз Д, соединенней с полос- тьн) 2 мри nf)MoiiHi прорези 5, на/1 кото- poii установлен датчик 6 ма1Л1итно1Ч) иотока. (;хема управления вкл1 1чает управляемый клшч 7, блок 8 сравнения, блок 9 задержки, пороговый элемент 10, уиравляе.п ключ 11 и блок 12 управления. Дня задания материала деталей в схему может быть введен потенциометр 13. Измеритель 14 тока через блок 15 задержки соединен с входом управляемого ключа 11. Выход порого- вог о элемента 10 соединен с управляющими входами управляеюлх ключей 7 и 11. Обмотка 3 питается от рег-улято- ра 1Ь тока. Под рабочей поверхностю 17 электромагнитного схвата находич - с.я стопка лис товых магиитопроводящих деталей 18 - 20.
Устройство работает следующим образом.
Рабочую поверхность 17 схвата ус- танав/иизают на детаги 18 - 20. Блок 12 управления вырабатывает сигнал для регулятора 16 тока на иодачу максимально возможного тока в обмотку 3. Листы 18 - 20 притягиваются к рабочей поверхности 17 схвата, после чего схват вместе с деталями при- лсднимается и блок 12 управления . рабатывает команду для pei y- 1лтора 16 тока на постоянное сни- ;ам(ие тока в обмотке 3. В момент отрыва одной из деталей 18-20 блок 9 задержки позволяет получить на выходе блока 8 сравнения сиг нал, кото- РЫ11 пройдя через пороговый элемент 10, откроет ключи 7 и 11, в результате чего значение магнитного потока вместе со значением тока будут пере- в блок 12 управления. Таким образс.м, величины магнитног о потока и тока в обмотке 3, предшествующие моменту отрыва деталей 18 - 20 , фиксируются в блоке 12 управления. В дальнейшем для захвата требуемого количества листов, например двух, в силовую обмотку 3 подают ток, больший чем ток в момент BpeMev.Ti t , и для удержания двух дистов поддерживают в обмотке 3 ток больишй, чем в момент
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1991 |
|
SU1821360A1 |
| ИЗМЕРИТЕЛЬ НАВЕДЕННЫХ ТОКОВ | 1992 |
|
RU2075753C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ УСТАНОВКИ ЭЛЕКТРОШЛАКОВОГО ПЕРЕПЛАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337979C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1986 |
|
SU1403313A1 |
| Способ контроля глубины упрочненного слоя ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1272210A1 |
| Устройство для управления электромагнитным краном | 1982 |
|
SU1089031A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1372516A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ МОНИТОРИНГА ТЕМПЕРАТУРЫ ОБМОТКИ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2718597C1 |
Изобретение относится к машиностроению и может быть использовано в робототехнических комплексах. Цель изобретения - расширение функциональных возможностей электромагнитного схвата путем захвата и удержания необходимого количества листовых деталей. В обмотку электромагнита 3 подают максимально возможный ток и после подъема схвата с несколькими захваченными деталями постепенно снижают силу тока до нуля. Измеряя магнитный поток датчиком 6 фиксируют моменты его скачкообразного падения, соответствующие откреплению каждой детали, и запоминают значения, поступающие от измерителя тока 14 в эти моменты. Затем определяют величину тока, необходимую для удержания определенного количества деталей. Электромагнитный схват состоит из корпуса 1 с полостью 2 и пазом 4, соединенными прорезью 5. Схема управления состоит из блоков задержки 9, 15, порогового элемента 10, блока сравнения 8, управляемых ключей 7, 11, регулятора тока 16, блока управления 12. При работе устройства блок сравнения 8 сравнивает сигнал, идущий от датчика магнитного потока 6, с его предыдущим значением и в момент их существенного различия ключи 7, 11 открываются для передачи соответствующих значений в блок управления 12. 2 с.п. ф-лы, 2 ил.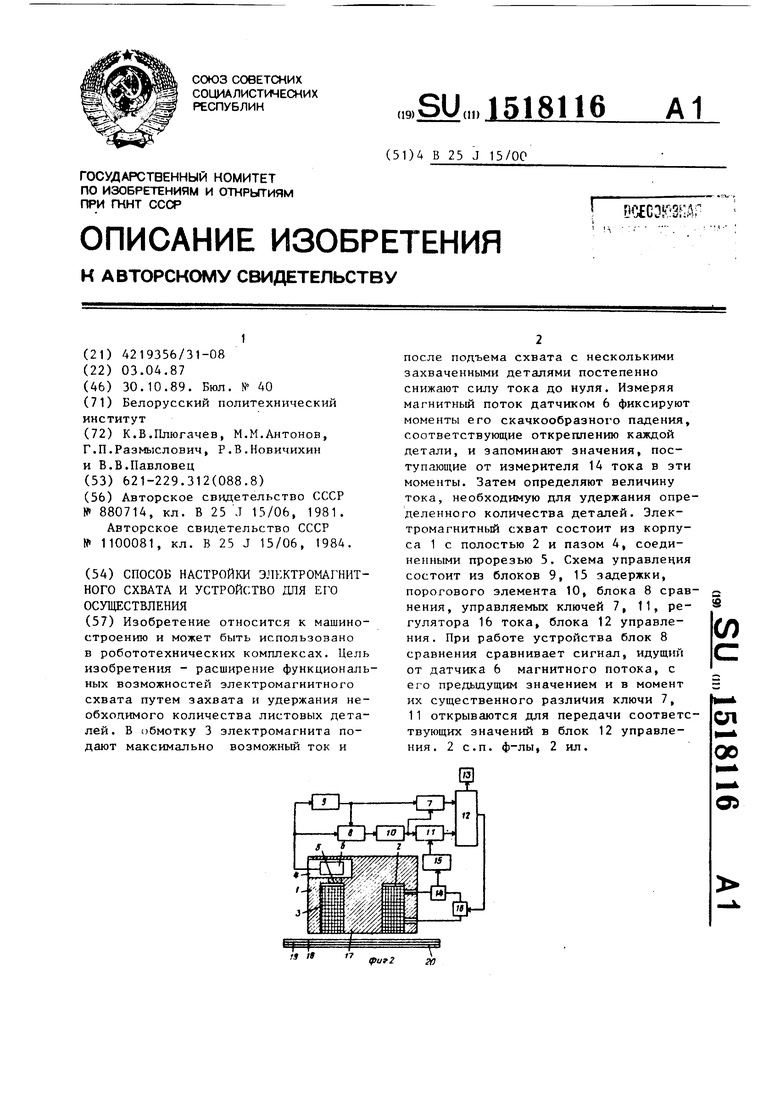
Устрош-.тки для осу лестнле1И1Я с по-, соба нр.с гройки эл.ктрома|-нитног( гхвя- та содер КИт 1Л1Чкт ,Ч1магн ггн.|. -1 1 , включающий кпп уг I , в ;лм1огти . кг.TOpOl-r. Гач;И |Ц-.1 ППМПТКЛ ).
о б р
е т е н и я
подачу тока я (( «мотку элсктрома1 нита захн;)т дст;1Л€ й, подт.ем схпата с деталями и последующий съем детале путем прекращения подачи тока в обмотку электромагнита, о т л и ч а - ю щ и и с я тем, что, с целью расширения функциональных возможностей, в обмотку подают максимально возможный ток, а после под1)ема захвата с деталями постепенно снижают силу тока в обмотке, непрерывно измеряя магнитны поток и фиксируя его скачкообразное падение и соответствующую величину тока, в момент открепления каждой детали, после чего определяют величину тока, необходимую для удержания определенного количества деталей .
2, Устройство для настройки электромагнитного схвата по п.1, содержащее электромагнитный схват, включающий в себя корпус с прорезью, катушку с силовой обмоткой и датчик
1 h
магнитного потока, установленны й над упомянутой прорезью, отличающееся тем, что, с целью расширения функциональных возможностей, оно дополнительно содержит измеритель тока, регулятор тока, два блока задержки, блок сравнения, пороговый элемент, блок управления и два управляем1,1х ключа, причем выход датчика магнитного потока через первый блок задержки связан с первьм входом блока сравнения, второй вход которого соединен с выходом датчика магнитного
потока, а выход через пороговой
элемент связан с управляющими входами обоих ключей, выходы которых соединены с входами блока управления, а вторые входы - с выходами соответствующих блоков задержки, при этом
выход блока управления соединен с входом регулятора тока, выход которого через измеритель тока связан с входом второго блока задержки.
Ч Ьi,.
ff-1
| Электромагнитный захват | 1980 |
|
SU880714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электромагнитный захват для плоских заготовок | 1983 |
|
SU1100081A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
