Изобретение относится к области робототехники и предназначено для обнаружения и съема с конвейера деталей из магнитного материала.
Целью изобретения является упрощение конструкции.
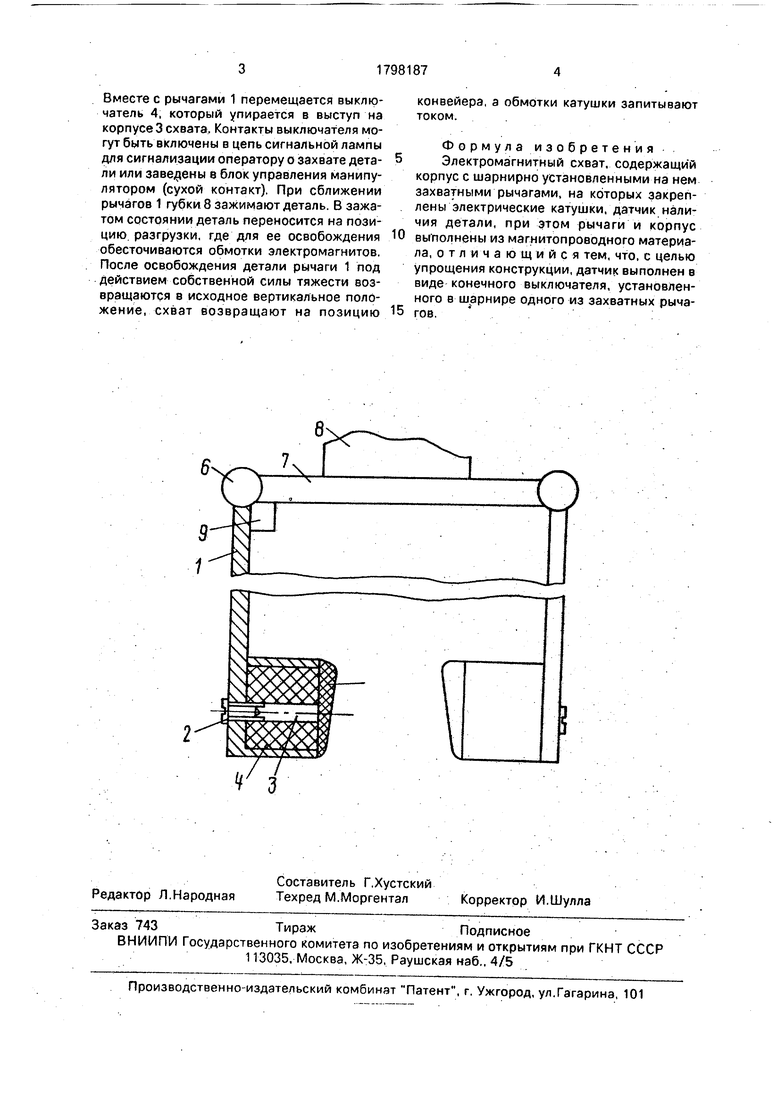
На чертеже показан электромагнитный схват, общий вид.
Схват содержигзахватные рычаги 1, которые с помощью шарниров 2 установлены на корпусе 3 схвата. Схват снабжен датчиком наличия детали, выполненным в виде конечного выключателя 4. Выключатель 4 установлен на одном из рычагов 1. Рабочая поверхность выключателя может соприкасаться с корпусом при перемещении захватного рычага 1. К торцам рычагов 1 на винтах 5 прикреплены электромагниты, состоящие из сердечников 6 и катушек 7, обмотки которых включены согласно. С внешней стороны катушек закреплены губки 8 из эластичного материала. Обмотки катушек подключены к регулируемому источнику электропитания (не показан).
Устройство работает следующим образом. Укрепленный на последнем звене манипулятора схват устанавливается на позиции конвейера. При настройке схвата производят адаптацию захвата к детали с наибольшим весом из используемой номенклатуры. Для этого на обмотки катушек 7 от регулируемого источника питания подают ток такой величины (но не больше предельно допустимой для данной катушки), чтобы было обеспечено сдавливающее усилие помещенной в рабочую зону схвата детали, достаточное для ее удержания.
В исходном состоянии обмотки электромагнитов схвата запитаны от источника ли- тания. В отсутствии детали зазор между губками 8 достаточно велик и величины магнитного потока недостаточно для сближения рычагов 1. При прохождении детали, движущейся по конвейеру, через рабочую зону схвата зазор между губками становится меньше, магнитное сопротивление этого участка падает. Уменьшение сопротивления приводит к возрастанию магнитного потока, достаточного для притягивания рычагов 1.
ел С
%j
Ю 00
00 vl
Вместе с рычагами 1 перемещается выключатель 4, который упирается в выступ на корпусе 3 схвата. Контакты выключателя могут быть включены в цепь сигнальной лампы для сигнализации оператору о захвате детали или заведены в блок управления манипулятором (сухой контакт). При сближении рычагов 1 губки 8 зажимают деталь. В зажатом состоянии деталь переносится на позицию, разгрузки, где для ее освобождения обесточиваются обмотки электромагнитов. После освобождения детали рычаги 1 под действием собственной силы тяжести возвращаются в исходное вертикальное положение, схват возвращают на позицию
конвейера, а обмотки катушки запитывают током..
Формула изобретен и я Электромагнитный схват, содержащий корпус с шарнирно установленными на нем захватными рычагами, на которых закреплены электрические катушки, датчик наличия детали, при этом рычаги и корпус выполнены из магнитопроводного материала, о т л и ч а ю щ и и с я тем, что, с целью упрощения конструкции, датчик выполнен в виде конечного выключателя, установленного в шарнире одного из захватных рыча- 5 гов.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Губка схвата | 1990 |
|
SU1815212A1 |
Использование: для обнаружения и съема деталей из магнитного материала. Сущность изобретения: на торцах рычагов закреплены электромагниты. Захватные рычаги с помощью шарниров связаны с балкой, которая крепится к руке манипулятора. Схват снабжен датчиком захвата. При прохождении детали через рабочую зону схвата магнитное сопротивление в зазоре между губками падает, магнитный поток возрастает и рычаги притягиваются, обжимая деталь, 1 ил.
| Схват руки манипулятора | 1975 |
|
SU585965A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
