сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ манипулирования ферромагнитными деталями с отверстием | 1986 |
|
SU1799727A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Электромагнитный схват | 1984 |
|
SU1220795A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Схват | 1986 |
|
SU1388281A1 |

Изобретение относится к машиностроению и может быть использовано в конструкциях исполнительных органов манипуляторов. Цель изобретения - расширение технологических возможностей и повышение надежности. Устройство содержит установленные соосно на основании с возможностью осевого и радиального перемещений электромагнитный схват и сердечник. На схвате установлен дополнительный электромагнит, взаимодействующий с сердечником, который выступает за рабочую поверхность схвата на соответствующую величину. Все электромагниты через ключи подключены к источнику постоянного напряжения, а дополнительный электромагнит подключен еще и к источнику импульсного напряжения. Для плавного и безударного опускания детали на позиции разгрузки в дополнительный электромагнит подается импульсное напряжение, при этом схват с деталью плавно соскальзывает по сердечнику. После опускания схвата его электромагниты обесточиваются и деталь отделяется. 1 ил.
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов для автоматизации вспомогательных технологических операций.
Целью изобретения является расширение технологических возможностей за счет работы с различными по конфигурации и размерам деталями, а также повышение надежности за счет плавного опускания детали при разгрузке.
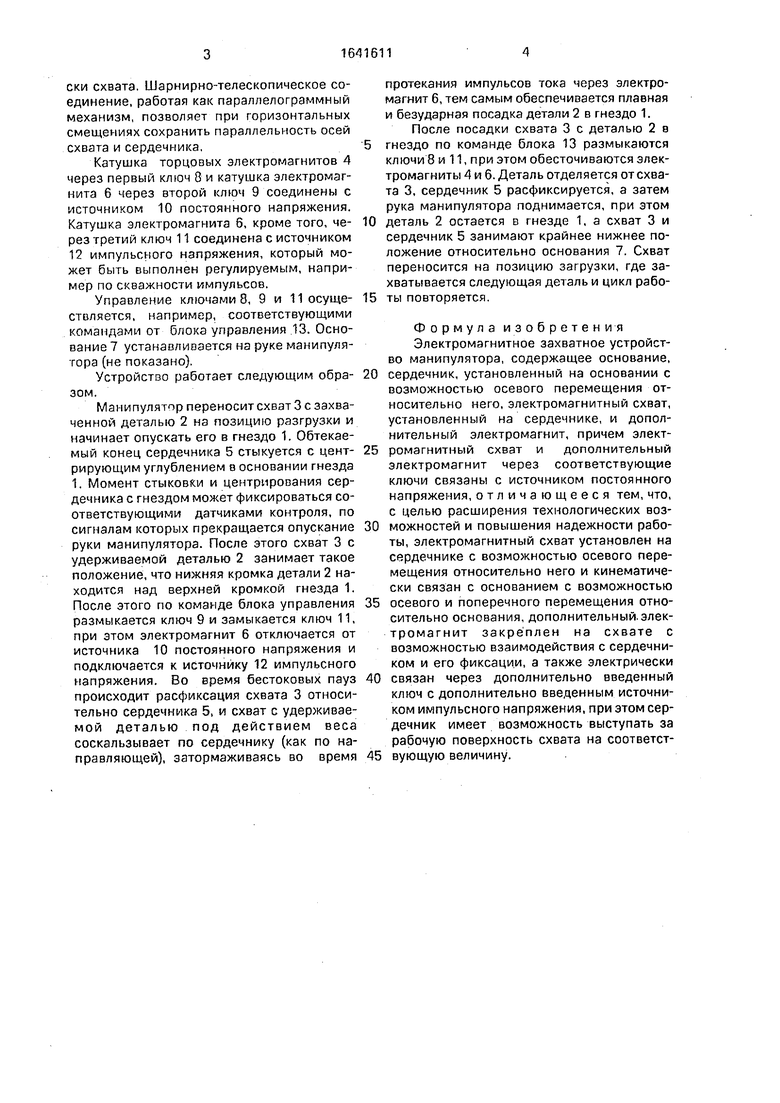
На чертеже показано устройство на позиции разгрузки.
На чертеже обозначено: позиция разгрузки 1 (например футерованное гнездо подвески гальваноавтомата), деталь 2, подлежащая гальванической обработке (деталь 2 может иметь различную конфигурацию и различную высоту), электромагнитный схват 3, имеющий соответствующие торцовые электромагниты 4, взаимодействующие при
захвате с торцовой плоскостью детали 2. Количество электромагнитов 4, как правило, четное и они попарно объединены с образованием разноименных полюсов для обеспечения надежного захвата детали 2. По оси схвата 3 установлен подвижный в осевом направлении сердечник 5, имещий возможность взаимодействия с дополнительным электромагнитом 6. Сердечник 5 имеет обтекаемую (овально-коническую) форму стыкующегося с гнездом 1 конца и форму многогранника (например, квадрата) в поперечном сечении, а длина выступающей за торец схвата 3 части сердечника соразмерна сумме глубины гнезда 1 и высоты детали 2 (имеется в виду самая высокая из обрабатываемых деталей).
Схват 3 и сердечник 5 выполнены плавающими в осевом и радиальном направлениях относительно основания 7, например, за счет шарнирно-телескопической подвео
-N
сЈ
ски схвата. Шарнирно-телескопическое соединение, работая как параллелогрэммный механизм, позволяет при горизонтальных смещениях сохранить параллельность осей схвата и сердечника,
Катушка торцовых электромагнитов 4 через первый ключ 8 и катушка электромагнита 6 через второй ключ 9 соединены с источником 10 постоянного напряжения. Катушка электромагнита 6, кроме того, через третий ключ 11 соединена с источником 12 импульсного напряжения, который может быть выполнен регулируемым, например по скважности импульсов.
Управление ключами 8, 9 и 11 осуществляется, например, соответствующими командами от блока управления 13. Основание 7 устанавливается на руке манипулятора (не показано).
Устройство работает следующим образом.
Манипулятор переносит схват 3 с захваченной деталью 2 на позицию разгрузки и начинает опускать его в гнездо 1. Обтекаемый конец сердечника 5 стыкуется с центрирующим углублением в основании гнезда 1. Момент стыковки и центрирования сердечника с гнездом может фиксироваться соответствующими датчиками контроля, по сигналам которых прекращается опускание руки манипулятора. После этого схват 3 с удерживаемой деталью 2 занимает такое положение, что нижняя кромка детали 2 находится над верхней кромкой гнезда 1. После этого по команде блока управления размыкается ключ 9 и замыкается ключ 11, при этом электромагнит 6 отключается от источника 10 постоянного напряжения и подключается к источнику 12 импульсного напряжения. Во время бестоковых пауз происходит расфиксация схвата 3 относительно сердечника 5, и схват с удерживаемой деталью под действием веса соскальзывает по сердечнику (как по направляющей), затормаживаясь во время
протекания импульсов тока через электромагнит 6, тем самым обеспечивается плавная и безударная посадка детали 2 в гнездо 1. После посадки схвата 3 с деталью 2 в
гнездо по команде блока 13 размыкаются ключи 8 и 11, при этом обесточиваются электромагниты А и 6. Деталь отделяется от схвата 3, сердечник 5 расфиксируется, а затем рука манипулятора поднимается, при этом
деталь 2 остается в гнезде 1, а схват 3 и сердечник 5 занимают крайнее нижнее положение относительно основания 7. Схват переносится на позицию загрузки, где захватывается следующая деталь и цикл работы повторяется.
Формула изобретения Электромагнитное захватное устройство манипулятора, содержащее основание,
сердечник, установленный на основании с возможностью осевого перемещения относительно него, электромагнитный схват, установленный на сердечнике, и дополнительный электромагнит, причем электромагнитный схват и дополнительный электромагнит через соответствующие ключи связаны с источником постоянного напряжения, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности работы, электромагнитный схват установлен на сердечнике с возможностью осевого перемещения относительно него и кинематически связан с основанием с возможностью
осевого и поперечного перемещения относительно основания, дополнительный электромагнит закреплен на схвате с возможностью взаимодействия с сердечником и его фиксации, а также электрически
связан через дополнительно введенный ключ с дополнительно введенным источником импульсного напряжения, при этом сердечник имеет возможность выступать за рабочую поверхность схвата на соответствующую величину.
| Электромагнитный схват манипулятора | 1985 |
|
SU1268410A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
