Изобретение относится к машино-. строению, в частности к захватам адаптивных робототехнических устройств.
Известен электромагнитный захват, содержащий ярмо, катушку возбуждения, усилитель тока, систему питания катушки возбуждения, датчик веса .
Недостатком такого захвата является невозможность их работы с деталями, расположенными не упорядочнено, а произвольно в таре.
Целью изобретения является сбрасывание лишних деталей, поднятых захватом из навала однотипных деталей, и удержание на нем только одной из них.
Поставленная цель достигается тем, что электромагнитный захват снабжен, генератором убывающего во времени тока и колшаратором,выход которого соединен с управляющим входом гене- . ратора а входы один - с датчиком веса, а другой - с потенциометром опорного напряжения.
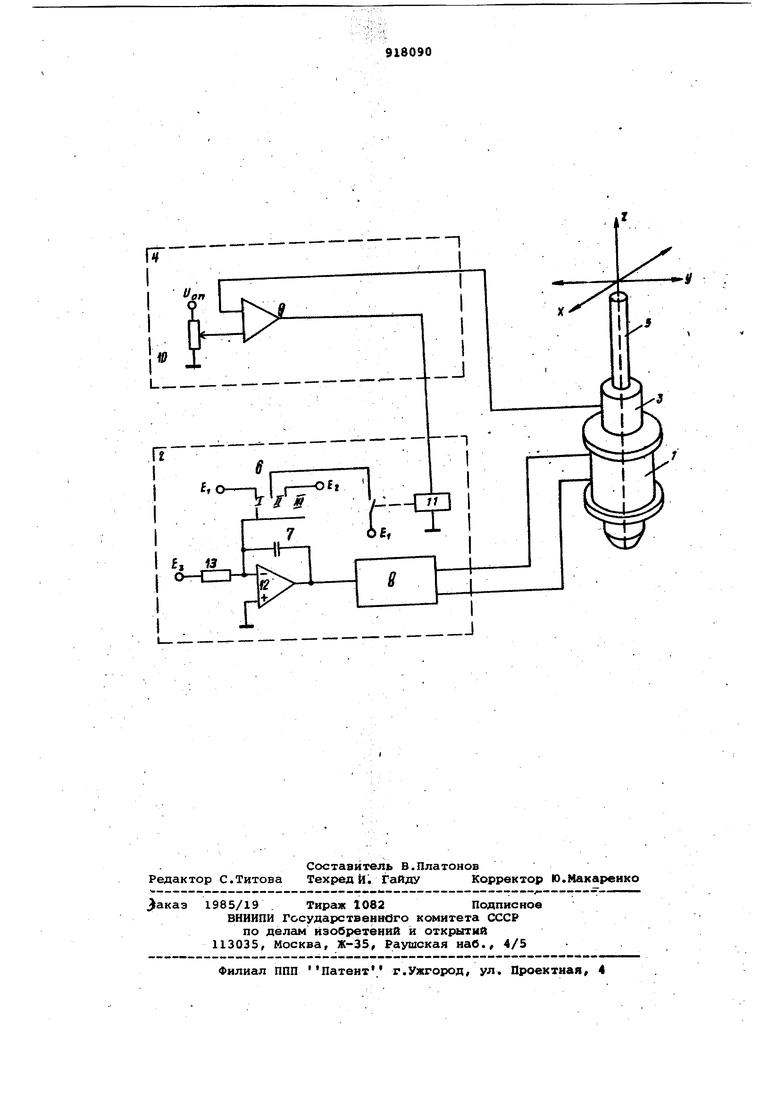
На чертеже изображен электромагнитный захват.
Захват включает в себя электромагнит 1, состоящий из сердечника и катушки возбуждения, генератор 2 убывающего тока с цепями управления,датчик 3 веса деталей и устройство 4 контроля веса деталей. Электромагнитный захват через датчик веса деталей закреплен на руке 5 манипулятора, обеспечивающего движение аахват;а в ортогональной системе координат.
Режим работы устройства характеризуется тремя состояниями, определяемыми переключателем 6.,
10
1.Захват и перенос деталей при максимальном токе, протекающем через катушку возбуждения электромагнита (позиция I).
2.Отбор-одной детали при линейно 15 убывающем токе в катушке электромагнита (позиция П).
3.Сброс детали при отключении тока в электромагните (позиция VI).
Электромагнитный захват работает 2 следующим образом.
Обесточеный электромагнит ( позиция переключателя 6) с помощью руки . манипулятора опускается вдоль оси ог до тех пор, пока не возникает сигнал 25 датчика 3 веса, сигнализирующий о соприкосновении электромагнита с де;талями или дном тары. Затем переключатель 6 переходит в позицию I (автоматически или вручную) и на инвертирующий вход операционного усилителя (ИУ) 7 подается отрицательное смещение Е и на выходе ИУ появляется положительное напряжение насыщения« вследствие чего усилитель 8 мсэдности будет питать катушку возбуждения MSiitсимальным током. Намагничивающая си--) ла в катушке электромагнита подобрана такой, чтобы обеспечить надежный подъем как минимум однрй детали даже если она была прижата или сцеплена с другими деталями, расположенными в таре. Далее рука манипулятора поднимается на заданную высоту, при этом в большинстве случаев захватом поднимается несколько деталей, произвольно висящих на захвате. После подъема-захвата с деталями переключатель 6 (автоматически) переводится в- позицию ГГ.
В процессе работы устройства сигнал с датчика веса поступает на вход компаратора 9,где сравнивается с опорным напряжением , задаваемым потенциометром 10. Уровень сигнала, снимаемого с потенциометра, выбирается так, чтобы на выходе компаратора было высокое напряжение при подъеме датчиком веса одной захваченной детали и низкое - при подъеме большого числа деталей. Таким образом,при захвате и подъеме только одной детали срабатывает реле 11, и через его контакты на вход операционного усилителя (ОУ) 12 через резистор 13 подается отрицательное смещение, в результате чего на выходе ОУ появляется положительное напряжение. Усилитель 8 мощности выдает в катушку возбуждения максимальный ток. Если захватом поднято больше одной детали, то компаратор ,9 обесточивает реле 11, которое разрывает цепь напряжения Е и ОУ 12 начинает работать в режиме интегратора. На его выходе возникает убывающее во времени напряжение, что обеспечивает с помощью усилителя мощности убывающий ток через кату1ику воз бужденИя электромагнита.В результате этого уменьшается намагничивающая сил и происходит постепенное отлипание деталей от захвата. Как только в захвате останется одна деталь, датчик веса выдает сигнал некоторой заданной амплитуды, срабатывает компаратор 9, и устройство переводится в режим
максимального тока, протекающего через катушку возбуждения. .
Сброс детали происходит при положении переключателя б в позиции Ш, в этом случае на вход операционного усилителя подается положительное нагпряжение Ej , что определяет низкий потенциал насшцения, а усилитель мощности не выцаёт тока в катушку возбуждения . Далее процесс извлечения из тары деталей продолжается аналогично описанному выше.
Устройство прзволяет раЪотать с деталями разной конфигурации и веса. Настройка электромагнитного захвата на данный тип детали происходит вруч ную с помощью регулировки потенцииметра . Для этого устройство переводят в позицию I, подвешивают к электромагниту требуемую, деталь веса Р и регулируют напряжение на потенциометре 10 до тех пор, пока напряжение на выходе компаратора 9 не станет равны нулю. После этого несколько -увеличивают напряжение, снимаемое с потенциометра, чтобы компаратор срабатывал от веса детали. Это обеспечивает надежное отлипание в процессе работы устройства всех деталей за исключением ОДНОЙ.
Формула изобретения
Электромагнитный захват, преимущественно для робота/ содержащий ярмо, катушку возбуждения, усилитель тока, систему питания катушки возбуждения, датчик Bjeca, отличающ и и с я тем, что с целью сбрасывания лишних деталей, поднятых захватом из навала однотипных деталей, удержания только одной из них, он снабжен генератором убывающего во времени- тока и компаратором, выход которого соединен с управляющим входом генератора, а входы: один - с датчиком веса, а другой - с потенциометром опорного напряжения.
Источники информации, принятые во внимание при экспертизе
1. Патент ФРГ 2293154, кл. В 23J 19/00, опублик. 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| Электромагнитный схват | 1984 |
|
SU1220795A1 |
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
| Устройство для селекции объектов по весовому признаку | 1985 |
|
SU1249487A1 |
| Устройство автоматического кассетирования корпусов | 1981 |
|
SU1009935A1 |
| Манипулятор | 1978 |
|
SU766854A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Схват для ферромагнитных деталей | 1986 |
|
SU1342729A1 |