(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU823118A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Схват робота-манипулятора | 1981 |
|
SU1007969A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |

1
Изобретение относится к маиганостро . ению и может быть применено в манипупяторах.
Известен схваг манипулятора, содержащий губки и связанный с приводом поворотный кронштейн, несущий узеп ориентации, снабженный датчиками высоты и продольного перемещения и связанный с системой управления L l.
Недостатком известного схвата является необходимость применения сложной электронной системы, управления, что при работе с ферромагнитными деталями нецелесообразно..
Цель изобретения - упрощение системы управления охватом при работе с ферромагнитными деталями.
Цель достигается тем, что узел ори; ентации выполнен в виде электромагнита . с О-образным сердечником, связанного с валом и .снабженного датчиком угла поворота, а также каретки с установленной на ней втулкой под указанный вал, причем кронштейн снабжен жестко закрепленной в нем осью, на которой установлена о возможностью перемещения вдоль нее каретка узла ориентации, которая может быть подпружинена в направлении перемещения относительно осн.
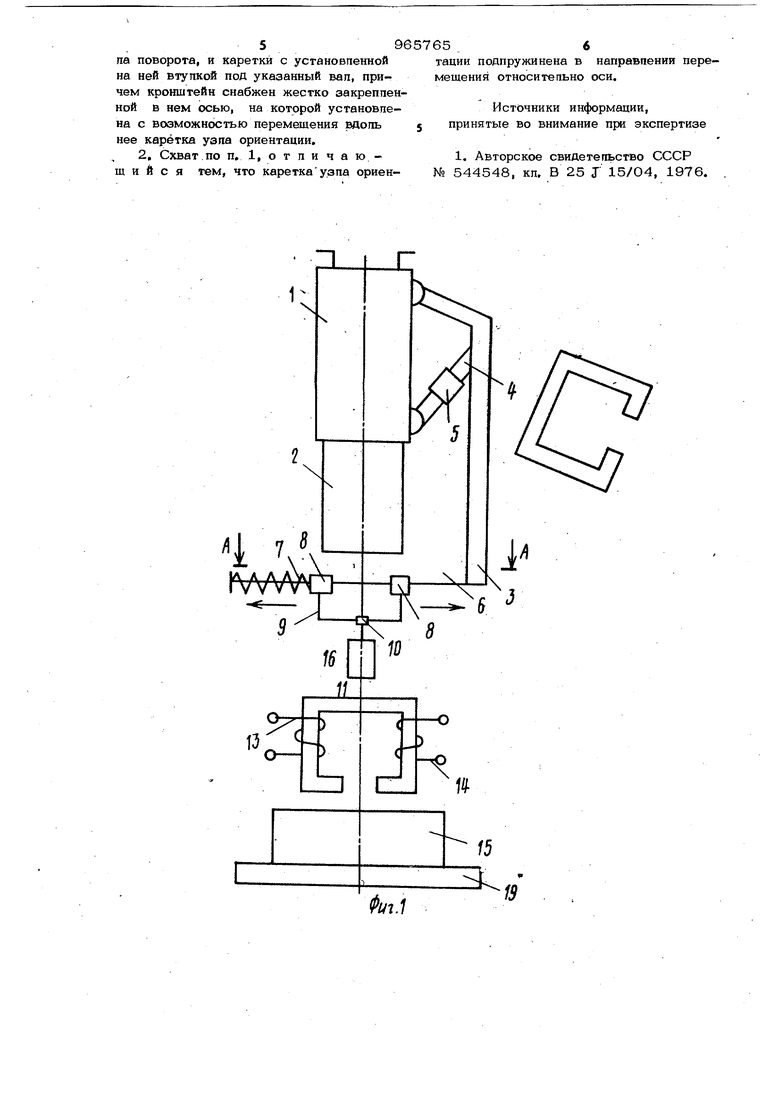
На фиг. 1 показан схват, общий вид; на фиг. 2 - тбже, вид сбокуТ на фиг. 3разрез А-А на г, 1.
Схват манипулятора содержит запястье 1, установленное с возможностью свобод10ного вращения и фнксировавия относительно своей оси, губки 2, крошптейн 3, имеющий возможность поворота при помощи штока 4, цилиндра 5 и несущей на себе тсь 6 с установленной на ней пружиной
15 7, взаимодействующей с ползуном 8 каретки 9, во втулке 10 которой установлен вал 11с электромагнитом 12, выполненным в виде;С-образного сердечника ; основной 13 и дополнительной 14 об20мотками. Электромагнит шполняет функции самоориентирующегося элемента на ферромагнитную деталь 15 в датчика высоты, где основная обмотка 13 явля
ется обмоткой возбуждения, а дополнительная 14 - информационной (сигнал на выходе информационной обмотки зависит от расстояния между сердечником и. деталью). На валу расположен датчик угла 16, Параллегаьно оси 6 установй1ен датЧик линейного перемещения17, постоянно взаимодействующий своим ползуном 18 с ползуном каретки.
Схват робота-манипулятора, работает следующим образом..
В исходном положении шток 4 цилиндра 5 втянут и электромагнит расположен ъ нижнем положении. Раствор губок 2 схвата устанавливается так, чтобы расстояние между ними было больше (на мм) диаметра наибольшей детали. Губки схвата робота, манипулируюшего мелкими заготовками, находятся в плоскости, перпендикулярной горизонтальной продольной осевой -линии электромагнита 12, и удалены от нее на одинаковое расстояние. Губки 2 схвата робота для манипулирования крупными заготовками, могу менять свое положение относительно электромагнита 12, так как его вал имеет возможность свободного вращения во. втулке 10 каретки 9.
Между полюсами электромагнита 12 сосредоточено магнитное поле. При появлении вблизи электромагнита 12 детали 15, .находящейся нанемагнитной плоскости 19, деталь стремится притянуться к нему. Электромагнит 12 рассчитан таким образом, что сила притяжения была недостаточна чтобы переместить к себе Деталь 15, но достаточна - чтобы сдвинуть электромагнит по оси 6 и повернуть его вал 11 относительно втулки 10 так, что электромагнит устанавливается над деталью 15 вдоль ее продольной оси в положении, при котором магнитный поток наиболее полно проходит через деталь 15 и замыкается через воздушные промежутки на полюса электромагнита 12.
Такая самоориентация электромагнита обусловлена тем, что ферромагнитные детали круглой ф1линдрической и правильной призматической формы стремятся расположиться вдоль силовь1Х линий однородного магнитного поля. При самоориентировании электромагнита (он может смещаться и вдоль оси 6 и поворачиваться с валом 11 feo втулке 10) робота для манипулирования мелкими деталями, губки 2 схвата устанавливаются перпенДикупярно продольной оси Детали 15, так как электромагнит через вал 11, каретку 9,
кронштейн 3, запястье 1 жестко связан с губками 2 и является их приводом.
Ориентация электромагнита 12 робота для манипулирования мелкими деталя1ми
вызывает срабатывание датчиков углового 16,. линейного смещения 17 и высоты, выдающих данные (координаты места захвата детали 15) в систему управления робота-манипулятора, которая последовательно подает команды на фиксирование поворота губок схвата, выключение электромагнита, на исполнительные механизмы смещения губок 2 вдоль продольной оси электромагнита, поворота электромагнита 12 (выдвижение штока 4 цилиндра 5), смещения вниз схвата в вертикальной плоскости, захвата и перемещения детали 15. Для возвращения схвата в исходное положение системой управления робота манипулятора выдается команда на втягивание штока 4 цилиндра 5, в результате чего электромагнит занимает нижнее положение, а возвратная пружина 7 устанавливает его симметрично вертикальной оси запястья.
При работе робота для манипулирования крупными Деталями сила электромагнита может быть недостаточна для привода схвата, вследствии этого, вал 11 электромагнита 12 установлен во втулке 10 и имеет свободное вращение, привод же разворота губок осуществляется, как обычно, системой управления робота. Поэтому, после самоориентации электромагнита на Деталь, первоначально выда- ется команда от датчика угла 16 на ориентирование (поворот) губок 2, в остальном работа системы управления аналогична роботу для манипулирования мелкими деталями.
Конструкция предлагаемого схвата робота технически упрощена и экономически эффективна тем, что не содержит дорогой адаптивной матрицы и не требует применений сложной электронной аппаратуры.
Формула изобретения
па поворота, и каретки с установпеннойтации подпружинена в направпении перена ней втупкой под указанный вал, при-мещения относитепьно оси. чем кронштейн снабжен жестко закрепленной в нем осью, на которой установпе-Источники информации,
на с возможностью перемещения вдопь j принятые во внимание при экспертизе
нее каретка уапа ориентации..
щ и и с я тем, что кареткаузпа ориен-№ 544548, кп. В 25 J 15/04, 1976.
i
Фт.1
17
