Изобретение относится к мащиностро- ению в частности, к силовым гидроприводам, используемым, преимущественно, в аэродинамических трубах для изменения и контроля положения модели в потоке.
Целью изобретения является повышение точности изменения и контроля положения исполнительного органа путем уменьшения влияния деформаций и зазоров в силопе- редающих элементах и компенсации утечек жидкости из рабочих полостей гидроцилиндров.
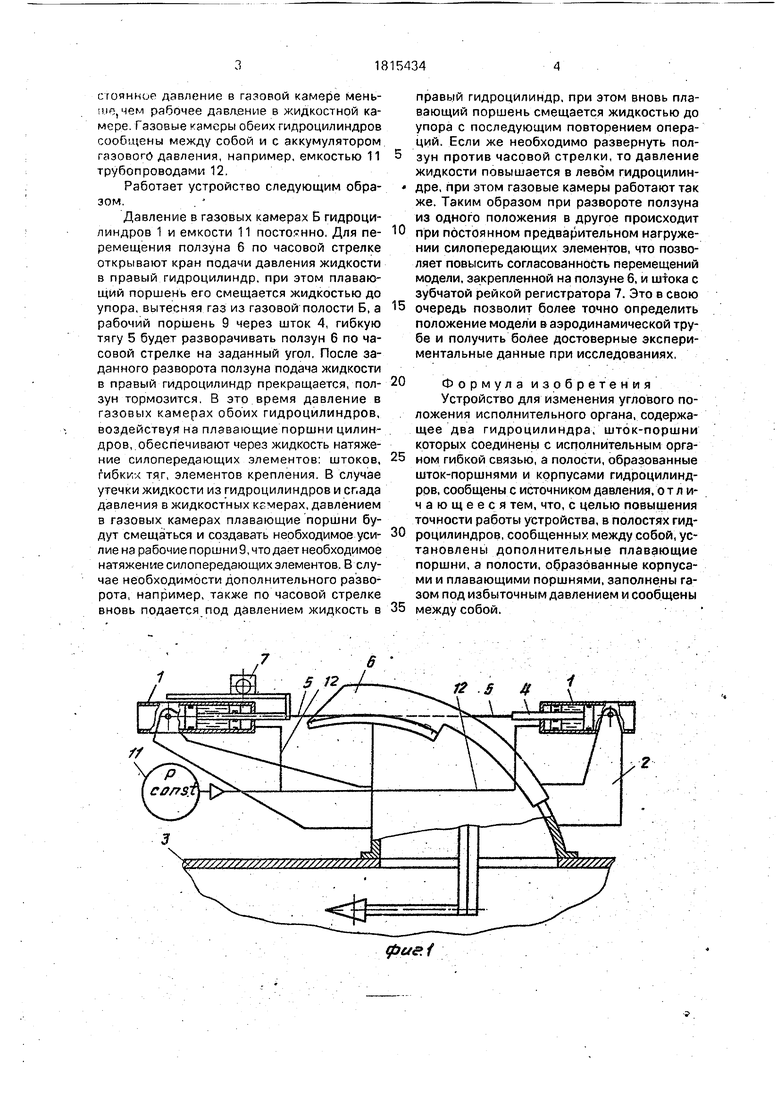
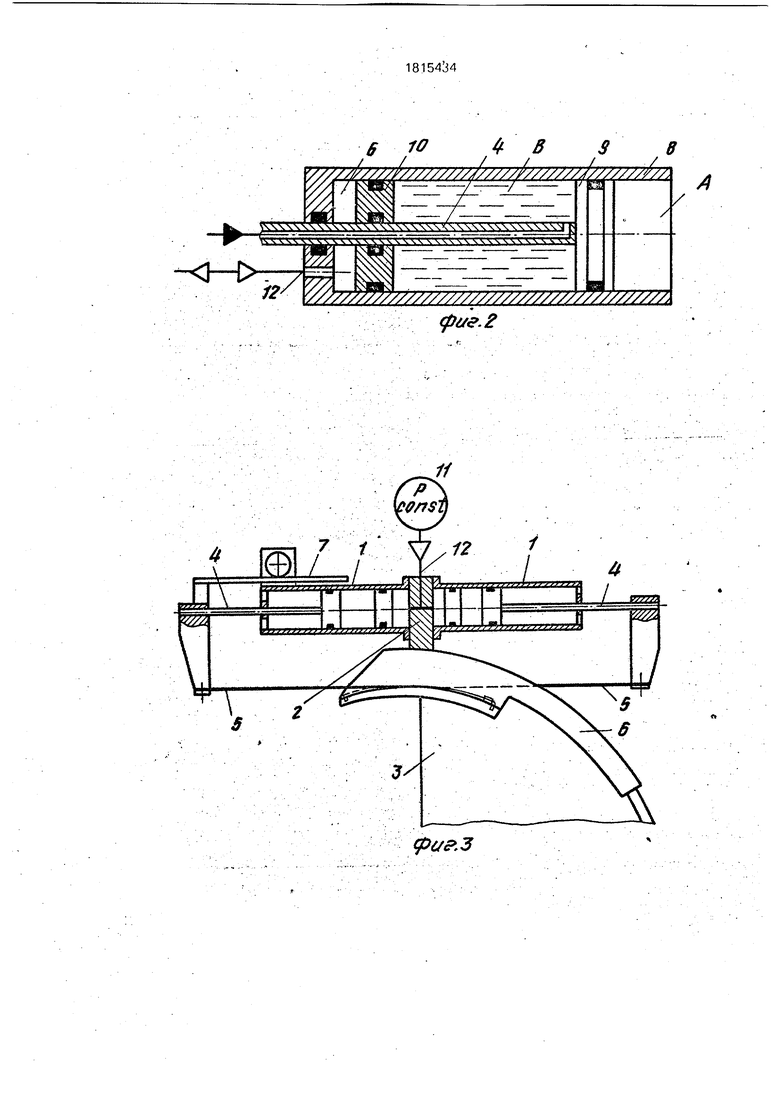
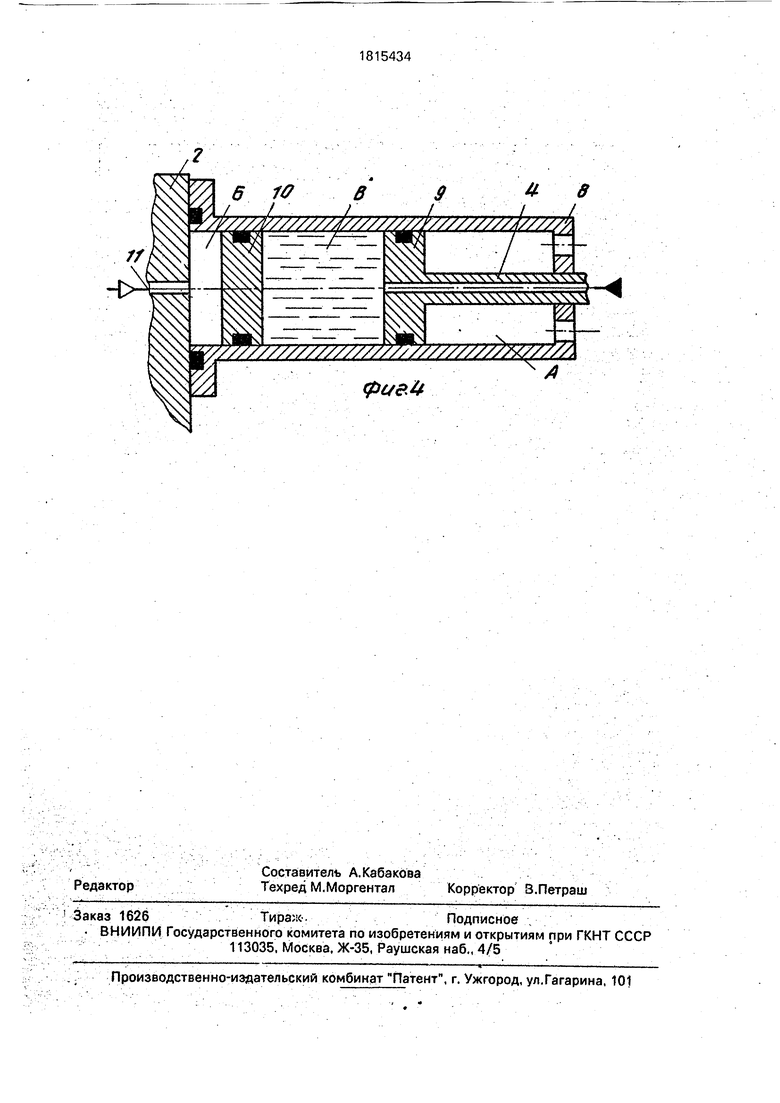
На фиг.1 показана схема использования устройства в аэродинамической трубе для изменения и контроля положения модели в потоке, когда плавающий поршень установлен в штоковых полостях гидроцилиндров; на фиг.2 - конструкция гидроцилиндров этой схемы; на фиг.З - схема использования гидроцилиндра с плавающим поршнем, размещенным в поршневых полостях гидроцилиндров; на фиг,4 - конструкция гидроцилиндра этой схемы.
Устройство содержит два гидроцилиндра 1, которые закреплены на кронштейне 2 аэродинамической трубы. Гидроцилиндры штоками 4 через гибкие тяги 5 сцеплены с ползуном 6, который перемещается воз- вратно-вращательно по дугообразным на- правляющим аэродинамической трубы совместно с моделью, размещенной в рабочем потоке трубы. На одном из гидроцйлиндров установлен регистратор 7, который представляет устройство, позволяющее с большой точностью по перемещению штока 4 автоматически регистрировать положение модели в трубе, например, с использованием датчика ПД.Ф-3. Оба гидроцилиндра одной конструкции и содержат цилиндр 8 с рабочим поршнем 9, закрепленным на штоке 4. Одна из полостей А гидроцилиндра сообщена с атмосферой (на фиг.2 - поршневая, на фиг.4 - штоковая), а в другой (рабочей) полости размещен плавающий поршень 10, который образует газовую камеру Б и жидкостную камеру В высокого давления, при этом поел
с
00
оп
4 СО
4
стоянкое давление в газовой камере мень- ше, чем рабочее давление в жидкостной камере. Газовые камеры обеих гидроцилиндров сообщены между собой и с аккумулятором газового давления, например, емкостью 11 трубопроводами 12,
Работает устройство следующим образом..
Давление в газовых камерах Б гидроцилиндров 1 и емкости 11 постоянно, Для перемещения ползуна 6 по часовой стрелке открывают кран подачи давления жидкости в правый гидроцилиндр, при этом плавающий поршень его смещается жидкостью до упора, вытесняя газ из газовой полости Б, а рабочий поршень 9 через шток 4, гибкую тягу 5 будет разворачивать ползун б по часовой стрелке на заданный угол, После заданного разворота ползуна подача жидкости в правый гидроцилиндр прекращается, ползун тормозится, В это время давление в газовых камерах обоих гидроцилиндров, воздействуя на плавающие поршни цилиндров,, обеспечивают через жидкость натяжение силопередающих элементов: штоков, гибких тяг, элементов крепления. В случае утечки жидкости из гидроцилиндров и спада давления в жидкостных камерах, давлением в газовых камерах плавающие поршни будут смещаться и создавать необходимое усилие на рабочие поршни 9, что дает необходимое натяжение силопередающих элементов. В случае необходимости дополнительного разворота, например, также по часовой стрелке вновь подается под давлением жидкость в
0
5
0
5
0
5
правый гидроцилиндр, при этом вновь плавающий поршень смещается жидкостью до упора с последующим повторением операций. Если же необходимо развернуть ползун против часовой стрелки, то давление жидкости повышается в левом гидроцилиндре, при этом газовые камеры работают так же. Таким образом при развороте ползуна из одного положения в другое происходит при постоянном предварительном нагруже- нии силопередающих элементов, что позволяет повысить согласованность перемещений модели, закрепленной на ползуне 6, и штока с зубчатой рейкой регистратора 7. Это в свою очередь позволит более точно определить положение модели в аэродинамической трубе и получить более достоверные экспериментальные данные при исследованиях,
Формула из обретения Устройство для изменения углового положения исполнительного органа, содержащее два гидроцилиндра, шток-поршни которых соединены с исполнительным органом гибкой связью, а полости, образованные шток-поршнями и корпусами гидроцилинд- ров, сообщены с источником давления, о т л и- чающееся тем, что, с целью повышения точности работы устройства, в полостях гидроцилиндров, сообщенных между собой, ус- тановлены дополнительные плавающие поршни, а полости, образованные корпусами и плавающими поршнями, заполнены газом под избыточным давлением и сообщены между собой.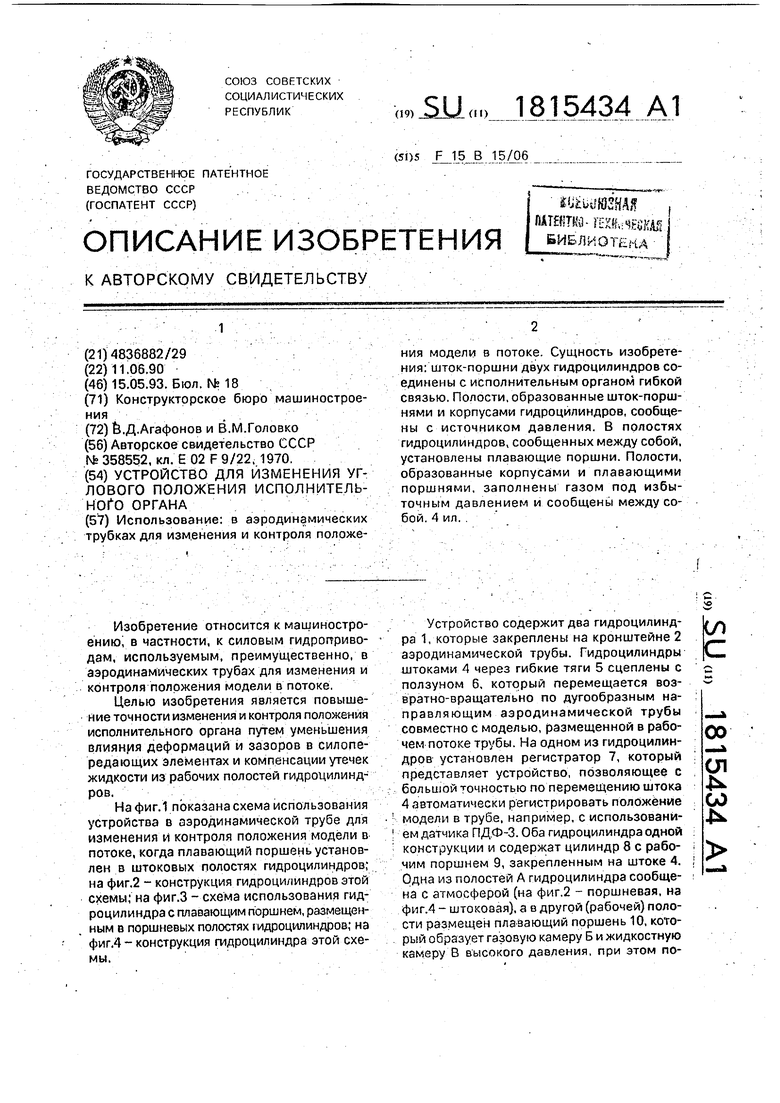
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган горного комбайна | 1987 |
|
SU1461913A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПОГРУЖЕНИЯ СТЕРЖНЕЙ В ГРУНТ | 2010 |
|
RU2443827C1 |
| АМОРТИЗАТОР-ГИДРОПОДЪЕМНИК | 1998 |
|
RU2154594C2 |
| УПРАВЛЯЕМАЯ ПОДВЕСКА | 2003 |
|
RU2240930C1 |
| Очистной агрегат | 1988 |
|
SU1602988A1 |
| Двухпозиционный гидравлический цилиндрС гидРОМЕХАНичЕСКиМи зАМКАМи B КРАйНиХпОлОжЕНияХ шТОКА | 1979 |
|
SU848786A1 |
| Предохранительное устройство жатки зерноуборочного комбайна | 1973 |
|
SU492251A1 |
| Гидропневматическая система трактора | 1977 |
|
SU745743A1 |
| Устройство для воздействия на угол излома оси шарнирно сочлененного транспортного средства (его варианты) | 1980 |
|
SU1258321A3 |
| Стенд для испытания рулевого управления транспортного средства | 1984 |
|
SU1163188A1 |
Использование: в аэродинамических трубках для изменения и контроля положения модели в потоке. Сущность изобретения: шток-поршни двух гидроцилиндров соединены с исполнительным органом гибкой связью. Полости, образованные шток-поршнями и корпусами гидроцйлиндров, сообщены с источником давления. В полостях тидроцилиндров, сообщенных между собой, установлены плавающие поршни. Полости, образованные корпусами и плавающими поршнями, заполнены газом под избыточным давлением и сообщены между собой. 4 ил. .
фие.1
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЦЕПНОГО МЕХАНИЗМА ПОВОРОТА ЭКСКАВАТОРА | 0 |
|
SU358552A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
