Изобретение относится к технолог обработки почвы и растений, в частн сти к автс 1атиза1Л1и вождения сельск хозяйственных агрегатов. Известен способ автовояодения сел скохозяйственных агрегатов путем ра дионавигации, заключгиощийся в опред лении местопаложения агрегата относительно опорных навигационных то.чек 1J. . . Однако этот способ может быть пр менен только для автовожцения машин но-тракторных агрегатов по прямой траектории в гоне. Известен также способ группового вождения, реализованный в системе группового управления сельсКохозяйственными агрегатами, заключающийся в перемещении по гону с поддержанием заданного угла равнения и дистанции между агрегатами на гоне и повороте агрегатов с последующим их выходом на другой гон 23. Недостатком известного способа является то, что при прохождении поворотной полосы агрегаты выстраивают ся в колонну и происходит холостой пробег агрегатов вдоль поворотной полосы до следующего гона. Целью изобретения является уменьшение холостых пробегов машинно- тракторных агрегатов. Указанная цель достигается тем, что при способе вождения сельскохозяйственных агрегатов, включающем перемещение по гону с поддержанием заданного угла равнения и дистанции между агрегатами на гоне и поворот с последующим их выходом, на другой гон, при повороте агрегатов также осуществляют поддержание заданного угла равнения и дистанции между агрегатами. На фиг. 1 приведена схема устройства для удержания заданного угла равнения и дистанции между агрегатами; на фиг. 2 - диаграмма хода лучей передатчика и радиолокационного дальномера; на фиг. 3 - схема способа группового вождения без поддержания заданного угла равнения и дистанции между агрегатами при повороте; на фиг. 4 - схема группового вождения с поддержанием.заданного угла равнения в гоне и при повороте. Система для группового вождения с поддержанием дистанции и угла равнения в гоне и при повороте содержит ведущий агрегат 1 с размещенными на нем радиопередатчиком 2 и уголковым отражателем 3, ведомый агрегат (агрегаты 4 с размещенными на нем ргщиоприемником 5 и микро-ЭВМ 6, вырабатывающей команды на исполнительное устройство 7 по -данным радиолокационного дальномера 8. Система работает следующим образом. . При выводе ведомых агрегатов 4 на заданное местов группе фиг. 4 механизатор, находящийся на ведущей машине 1 , через радиоканал передатчик 2 .приемник 5 передает на ведомые агрега ты 4 команды начала и конца движения, изменения скорости и направления движения. Далее агрегаты удерживаются в группе по командам микро-ЭВМ 6, получающей сигналы отклонения дистанции и угла равнения. (фиг. 4) от заданных величин, вырабатываемым радиолокационным дальномером 8, луч которого отражается уголковым отражателем 3, размещенным на ведущем агрегате. При этом исполнительное устройство 7 по .командам микро-ЭВМ 6 изменяет скорость и положение направляющих колес агрегата в сторону, противоположную отклонениям параметров движения от заданных величин. Данный способ при движении по сужающейс.я спирали позволяет полностью исключить холостые пробеги сельскохозяйственных агрегатов, что значительно сокращает расход топлива при проведении сельскохозяйственных работ. .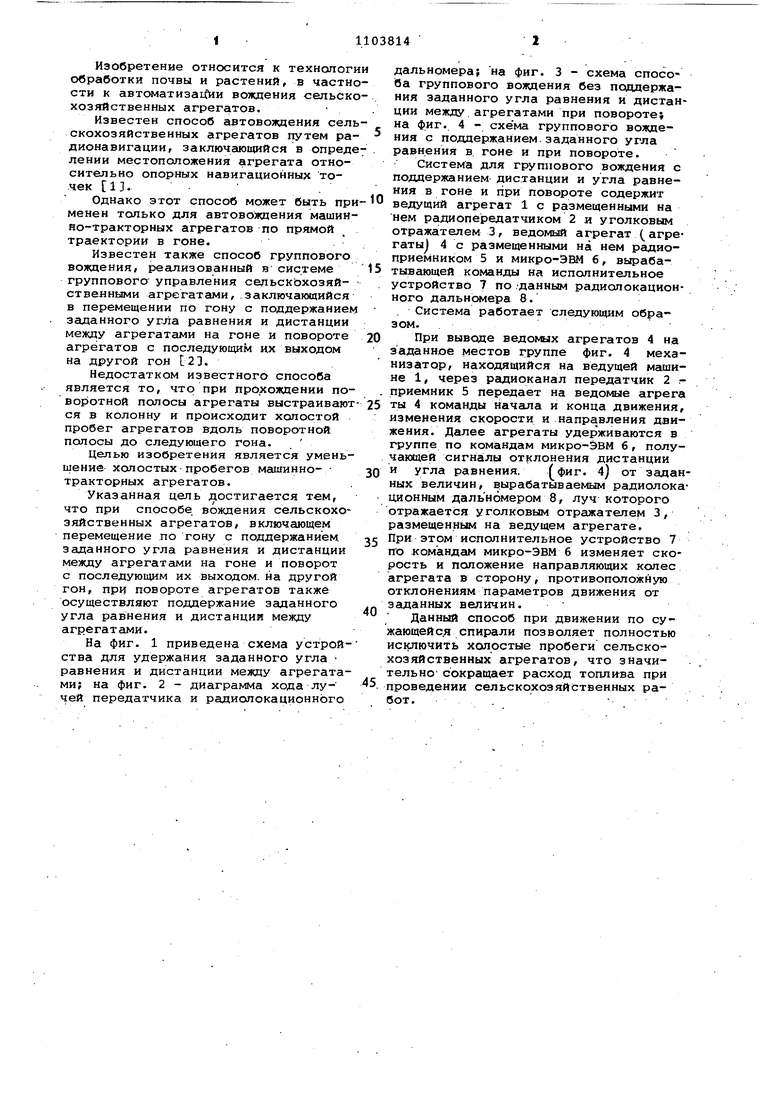
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОГО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ | 1966 |
|
SU179526A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| Устройство для группового вождения тракторных агрегатов | 1979 |
|
SU950211A1 |
| Индукционное устройство для груп-пОВОгО ВОждЕНия шиРОКОзАХВАТНыХТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU829001A1 |


СПОСОБ ГРУППОВОГО ВОЖЦЁНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРЕГАТОВ, включающий перемещение по гону с поддержанием заданного угла равнения и дистанции между агрегатами на гоне и поворот агрегатов с последующим их выходом на другой гон, отличающийся тем, что, с целью уменьше- ния холостых пробегов, при повороте агрегатов также осуществляют поддержа ние заданного угла равнения и дистанции между агрегатами. (Л со 00 4ib
-ч- - s V V
T.W,O
ili
I I I I I I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автовождения сельскохозяйственных агрегатов | 1977 |
|
SU946426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
