Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для загрузки контейнеров картофелем.
Цель изобретения - повышение производительности, степени загрузки и снижение механических повреждений груза при загрузке в последовательно установленные емкости.
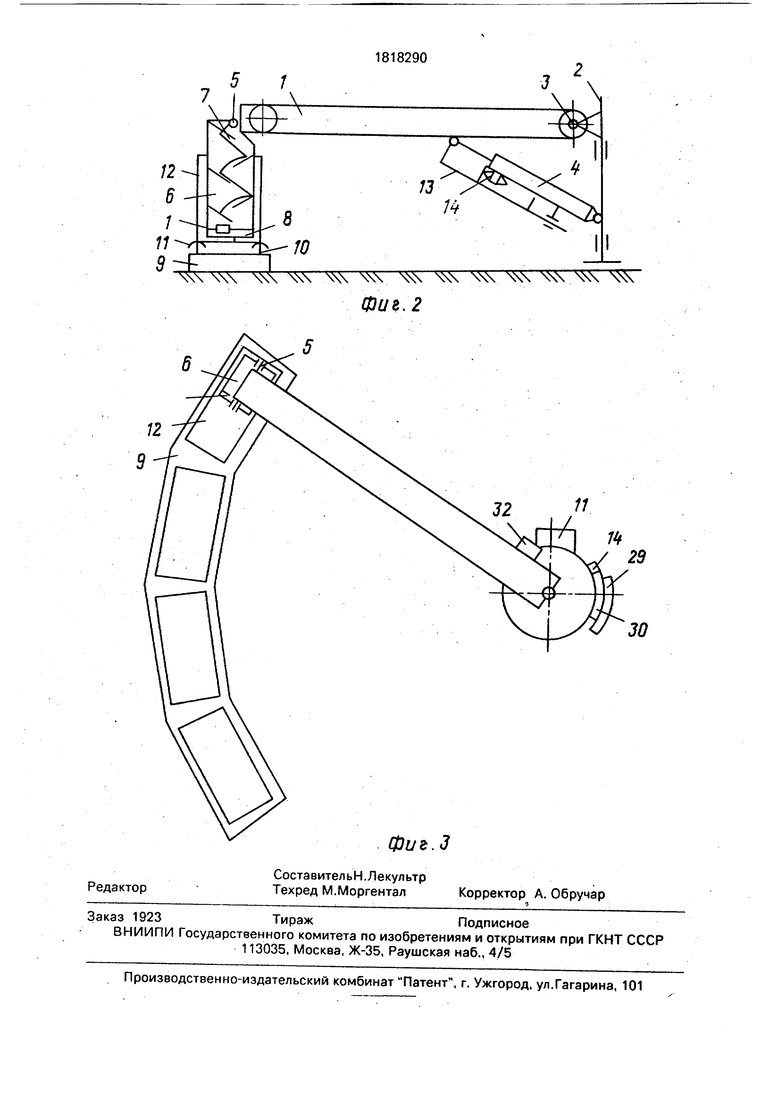
На фиг. 1 представлена структурная схема устройства: на фиг, 2 - то же, общий вид; на фиг. 3 - то же, вид сверху.
Устройство для загрузки сыпучих грузов в емкости содержит конвейер 1, консольно установленный на вертикальной оси 2 основания с возможностью поворота в горизонтальной плоскости относительно этой оси и в вертикальной плоскости относительно оси 3 посредством привода 4. На выгрузочной части конвейера 1 установлен с возможностью поворота в вертикальной плоскости на оси 5 спуск-гаситель 6 с наклонными полками 7 и фартуком 8.
На основании установлена эстакада 9, выполненная в виде дугообразной сварной конструкции со стойками 10 для установки ножек 11 контейнера 12. На эстакаду устанавливается несколько контейнеров. Привод 4 образован силовым цилиндром, шток и корпус которого связаны тягой 13 для взаимодействия с датчиком 14 максимального угла поворота конвейера в вертикальной плоскости.
Для управления конвейером устройство содержит датчик 15 уровня груза в емкости, выход которого соединен с блоком 16 задержки, управляемыми переключателями, которые имеют элементы 17,18, 19 управления, размыкающие элементы 20,21,22,23, замыкающие элементы 24, 25, 26 и замыкающий и размыкающий переключающий элемент 27, а также блок 28 задержки, концевые выключатели 29, 30 соответственно начального положения конвейера при повороте в горизонтальной плоскости и конечного положения при повороте в горизонтальной
ел
с
оо
00
ю
плоскости, блок 31 управления приводом поворота конвейера в вертикальной плоскости, блок 32 управления приводом ленты конвейера. На фиг, 1 условно показан конвейер 33 и груз 34,
Устройство работает следующим образом.
Когда конвейер 1, со спуском-гасителем 6, находится в нижнем положении, правая
стенка спуска-гасителя находится рядом с
правой стенкой контейнера (фиг. 3). Верхний упор, расположенный на тяге 7 (фиг. 2), воздействуя на выключатель 14, отключает элемент 18 первого переключателя. При этом элемент 27 замыкает цепь от элемента 16 задержки на блок 31, а цепь от элемента 16 на элемент 20 он размыкает; элемент 26 разомкнут, а элемент 21 замкнут,
При этом положении элементы 17 и 19 переключателей отключены. При этом эле- мент 20 разомкнут, а элемент 25 замкнут, элементы 22 и 23 замкнуты, а элемент 24 разомкнут.
Так как элементы 21 и 25 замкнуты блок 22 включен и он обеспечивает подачу карто- феля в контейнер. Уровень картофеля в первом контейнере начинает возрастать. Расстояние между уровнем картофеля и чувствительным элементом датчика 15 уменьшается. При уменьшении этого расстояния до заданного предела происходит срабатывание датчика 15, который подает сигнал на блок 16 задержки. Длительность этого сигнала равна времени взаимодействия чувст- вительного элемента датчика 15 с перекатывающимися клубнями. Блок 16 задержки удлиняет этот сигнал по времени и подаёт его через переключающий элемент 27 на блок 31, Блок 31 включает привод 3 подъема и выгрузной конец конвейера 1 и спуск-гаситель 6 приподнимается над насыпью. Датчик 15 удаляется от насыпи. Подъем конвейера продолжается до тех пор, пока он не поднимется до верхнего предельного положения, которое соответст- вует максимальному уровню картофеля в контейнере, В этот момент тяга 13 воздействует на один из переключателей, который включает элемент 18, Элемент 18, воздействуя на элемент 27, размыкает цепь от блока 16 до блока 31 и включает цепь от блока 16 задержки на элемент 20. Одновременно включается элемент 26 и отключается элемент 21. Остальные элементы не меняют своего положения. В связи с тем, что эле- мент 21 включен параллельно блокировочному контакту типовой схемы управления электродвигателем, блок 32 остается включенным и подача картофеля в контейнер продолжается,
0
5
0
5 0 5 0 5 0 5
При дальнейшем увеличении уровня картофеля в контейнере срабатывает датчик 15. Сигнал отдатчика 15 поступает на блок 16 задержки и через элементы 27 и 20 поступает на блок 35 управления поворотом конвейера в горизонтальной плоскости, которая поворачивает конвейер 1 против часовой стрелки (фиг, 3). Угол этого поворота определен длительностью сигнала блока 16 задержек, равного тг. При этом повороте датчик 15 удаляется от вершины насыпи по горизонтали. Происходит возрастание насыпи в новом положении конвейера 1 и спуска-гасителя 6. После ее возрастания до заданного уровня снова срабатывает датчик 15 и конвейер снова поворачивается против часовой стрелки. Так продолжается до тех пор. пока контейнер полностью не заполнится картофелем, В момент полного заполнения контейнера левая боковая стенка спуска-гасителя 6 оказывается рядом с левой боковой стенкой контейнера. В этот момент срабатывает концевой выключатель 30, определяющий окончание догрузки контейнеров. Сигнал от этого концевого выключателя, через элемент 23 поступает на вход элемента 1.7 переключателя. Элемент 17 размыкает элемент 20. Прекращается поворот конвейера, так как блок 35 оказывается отключенным. Одновременно элемент 17 размыкает элемент 25. Блок 32 отключается и подача картофеля в контейнер прекращается.
Одновременно элемент 17 включает блок 28 задержки. Он обеспечивает задержку поступления сигнала от элемента 17 на блок 35 на время 1...3 с, Это необходимо для того, чтобы последние клубни, поступившие на спуск-гаситель 6, успели бы скатиться по нему в контейнер.
Через время задержки блока 28, он подает сигнал на поворот конвейера блоком 35 против часовой стрелки в сторону другого контейнера. Конвейер поворачивается до тех пор, пока спуск-гаситель не пройдет над правой боковой стенкой второго контейнера. В этот момент концевой выключатель 30 отключается и одновременно включается концевой выключатель 29.
Сигнал отключения концевого выключателя 30 подается через замкнутый элемент 23, на элемент 17 и элемент 17 отключается. Его отключение приводит к замыканию элемента 20, включению элемента 25 и отключению сигнала блока 28 задержки на блок 35. Поворот конвейера прекращается.
Сигнал включения концевого выключателя 29 через замкнутый элемент 22 и через замкнутый элемент 26 подается на блок 31. Под воздействием этого сигнала блок 31
опускает конвейер 1. Опускание конвейера 1 происходит до тех пор, пока не сработает датчик 14 под воздействием верхнего упора, установленного на тяге 1.3 (фиг. 2). В момент срабатывания датчика 14 подается сигнал на элементов, который отключаясь, замыкает цепь между блоками 16 и 31, переключая элемент 27. Одновременно, элементом 27 цепь от .блока 16 на элемент 20 размыкается. Размыкается и элемент 26, что обеспечивает остановку опускания конвейера вниз. Кроме того, элемент 18 производит включение элемента 21. Происходит включение блока 32, а следовательно, начинается подача картофеля во второй контей-
нер. : : ./: . ; :;.;V;:i ::,. . : г
Загрузка второго и последующих контейнеров и переход конвейера к следующему контейнеру происходит так же как и загрузка первого контейнера.
После загрузки первого и последующих контейнеров погрузчики убирают их с эстакады и на их место устанавливают пустые контейнеры,-:;;-,:V ; ... -.:
После догрузки последнего контейнера, установленного на эстакаде, по окончаний времени задержки блока 28, конвейер начинает поворачиваться против часовой стрелки, так же; как это было после загрузки предыдущих контейнеров. При повороте конвейера на незначительный угол происходит срабатывание концевого датчика 36 максимального угла поворота конвейера в горизонтальной плоскости. Сигнал от датчика 36 подается на элемент 19. Срабатывая, элемент 19 размыкает элементы 22 и 23, чем предотвращается ложное срабатывание .элементов, обеспечивающих опускание и остановку конвейера. Размыкание элемен- та 23 обеспечивает отключение элемента 17. Управляющий сигнал блока 28 на блок 35 прекращается. Прекращается поворот конвейера, элементы 20 и 25, замыкаются. Размыкание; элемента 22 предотвращает ложную подачу управляющего. сигнала на опускание конвейера. Одновременно сигнал элемента t9 через замкнутый элемент 24 подается на блок 35, .который начинает поворачивать конвейер по часовой стрелке, возвращая его к первому контейнеру.
При подходе правой стенки спуска-гасителя 6 к правой стенке первого контейнера срабатывает датчик 36. Происходит отключение элемента 19. Элементы 22 и 23 замыкаются, а элемент 24 размыкается, По- ворот конвейера по часовой стрелке прекращается. Одновременно срабатывает концевой выключатель 29. Обеспечивается команда на опускание конвейера, так как сигнал от выключателя. 29 через элемент 22
и элемент 26 поступает на блок 31, который опускает конвейер вниз, до срабатывания датчика 14 под воздействием верхнего упора тяги 13.
Таким образом производится загрузка контейнеров по циклической программе.
Наличие фартука 8 на спуске-гасителе 6 предотвращает скатывание клубней через правую стенку контейнера в момент максимального подъема конвейера и способствует наиболее полному заполнению контейнера.
Использование спуска-гасителя 6 для загрузки контейнеров, кроме снижения повреждений, позволяет наиболее полно загружать контейнеры. Это обеспечивается за счет того, что спуск-гаситель 6 позволяет снизить начальную скорость движения клубней, приданную им конвейером. Поэтому клубни начинают скатываться за края контейнера при более высокой степени заполнения контейнера, что и позволяет повысить степень загрузки контейнеров.
Установка нескольких контейнеров на эстакаде, с последовательной их загрузкой, позволяет исключить простои конвейера, подающего картофель в контейнеры. Кроме того установка контейнеров на эстакаде позволяет исключить простои автопогрузчиков. Это приводит, в сочетании с системой автоматики, к значительному повышению производительности.
Система автоматического управления, использующая дугообразную форму эстакады для фиксированной установки контейнеров, спуск-гаситель, установку конвейера на вертикальной и горизонтальной осях и приводов для перемещения конвейера, обеспечивает качественную загрузку контейнеров. При этом система автоматики обеспечивает -минимально возможную высоту падения клубней, за счет этого снижаются повреждения картофеля. Одновременно система автоматики обеспечивает циклическую загрузку контейнеров с минимальными остановками подачи картофеля в контейнеры на время перехода конвейера из одного контейнера в другой,
Ф о р мула изобретения
Устройство для загрузки сыпучих грузов в емкости, содержащее установленный кон- сольно на основании с возможностью поворота соответствующим приводом, имеющим блок управления, в горизонтальной и вертикальной плоскостях конвейер, на котором установлен с возможностью поворота в вертикальной плоскости спуск-гаситель для направления груза в емкости, о т л и- ч а ю щ е е с я тем, что, с целью повышения производительности, степени, загрузки и
снижения механических повреждений груза при загрузке в последовательно установленные емкости, оно снабжено концевыми выключателями начального и конечного положения конвейера при повороте в горизонтальной плоскости, установленным в спуске-гасителе датчиком уровня груза в емкости, датчиком максимального угла поворота конеейера в горизонтальной плоскости, датчиком макеймальибгЬ йовр- рота конвейера в вертикальной плоскости, управляемыми переключателями, каждый из которых еетэлементуправления иС8Я- 6анйыесйШз амыкаюфё Шмыка щиеи переключающие элементыистоками задер- жки; ъход одного из который сабли ней с , выходов элемента управления первого: yji-V равняемого переключателя, а выход под- ключей к одному из входов $лока; : управления приводЪм поворота конвейера в горйзсэитальйой Лйрешсш другой вход чсоторо ерёз размыкающий элемент пер вого уяравляемогб гйрекя оча елй и:;зам. кэ«ощйй тгерё лйча1ощйй второго управляешь пё;ре1ШчатёЛя ледкл(оч6н к выходу Шдеуго Щокй заяержш, едторыи; через: размывающий тЩкяючеюИи элемен дрогб рашйемог nej3eKrtK) поД1Ш 6Шйч «ХОДУ- ЬЙй А.Фип угтравле- ниё прив бдбм г1оео о а1К1НвёЙё0а в верти-
o
... 15 -... ;.- 2Ц - . 25 ;: ;; . «iu
кальной плоскости, к входу Опускание которого через замыкающий элемент второго и один из размыкающих элементов третьего управляемых переключателей подключен концевой выключатель начального положения конвейера при повороте в горизонтальной плоскости, и концевой выключатель конечного положения конвейера при повороте в горизонтальной плоскости через другой размыкающий элемент третьего управляемого переключателя подключен к элементу упраал ния первогр управляемого переключателя, замыкающий элемент кртр- рдго исоединённыйic№п последовательно размыкающий элемент еторого управляемого переключателя вклЮче«ь в 14впь управле- ни приаодом ленты конвейера, прГи.этом э е е«т раёле«ия третьего управляемого переключателя соединён с датчиком ак- с 1мального угла поборота: конвейера в го- ри онтальной плоский; ЬЛ5|шй через замыкающий элет йоследиш ftepe- Ыючателя соединен с входом Возврат блока уг1равлейи 11 58дрртом конвейера в горйзонт&л-ьмбй TWidfeKOigTJ. . элемент уп равленмя & огоугфШя $г4пе кп&- 4&теля ёхтеддайён ;с ;: дзтчигкЬм максим лького угла поШрота конвейера в вертикальной тл;о6кости. ;
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления загрузкой картофеля из бункера в автотранспорт | 1990 |
|
SU1755782A1 |
| Устройство управления транспортером-загрузчиком картофеля | 1985 |
|
SU1296047A1 |
| Устройство автоматического управления транспортером-загрузчиком картофеля | 1989 |
|
SU1776367A1 |
| Картофелесортировальный пункт | 1988 |
|
SU1646535A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
| УСТРОЙСТВО ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2448029C1 |
| Корнеклубнехранилище М.Д.Завиленчика | 1986 |
|
SU1430316A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОДЕРЖИМОГО КОНТЕЙНЕРОВ | 2005 |
|
RU2297623C1 |
| СПОСОБ ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2441830C1 |
| Линия фасовки картофеля | 1985 |
|
SU1314991A1 |

Использование: в области сельскохозяйственного машиностроения. Сущность изобретения: устройство содержит конвейер, на выгрузной части которого установлен с возможностью поворота в вертикальной плоскости спуск-гаситель. Устройство содержит систему автоматического управления поворотом конвейера, включающее датчики уровня груза в контейнере и максимального угла поворота конвейера в вертикальной и горизонтальной плоскостях, которыми управляются блоки поворота конвейера и блок управления приводом ленты конвейера.3 ил.
6
12
11
фиг.З
| Устройство для транспортирования сыпучих материалов | 1986 |
|
SU1569306A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
