Изобретение относится к сельскохозяйственному производству, в частности к устройствам управления транспортерами-загрузчиками картофеля.
Цель изобретения - снижение механических повреждений картофеля и улучшение условий труда оператора.
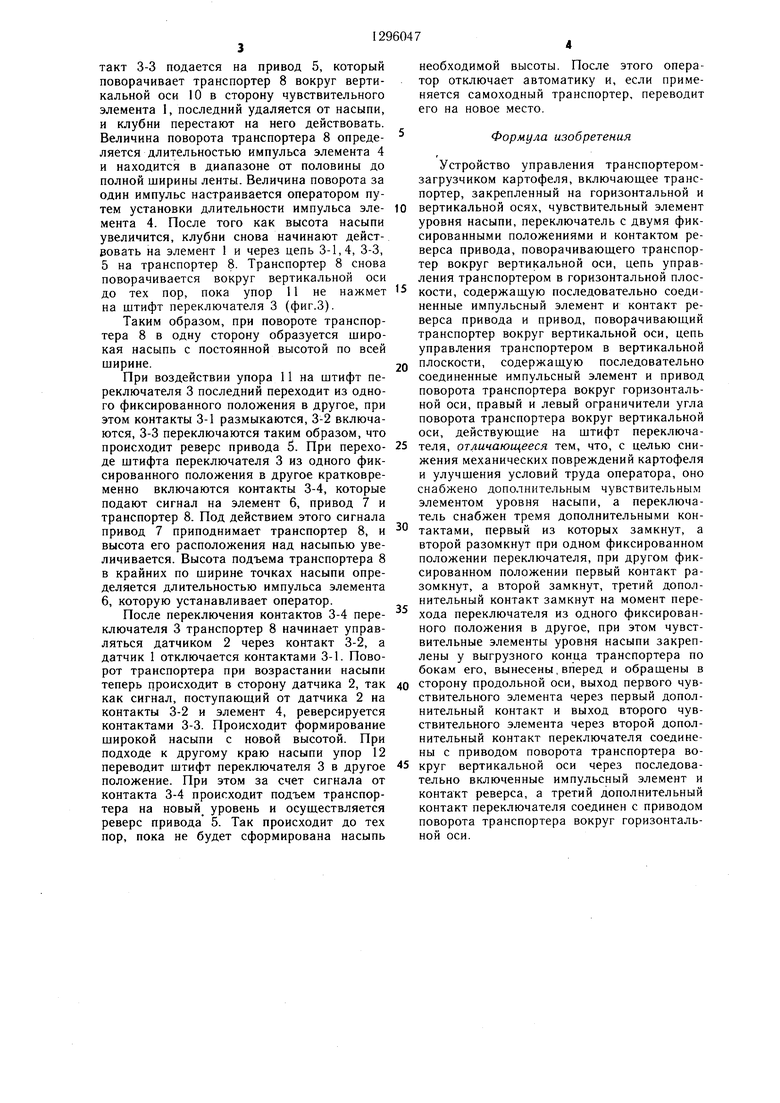
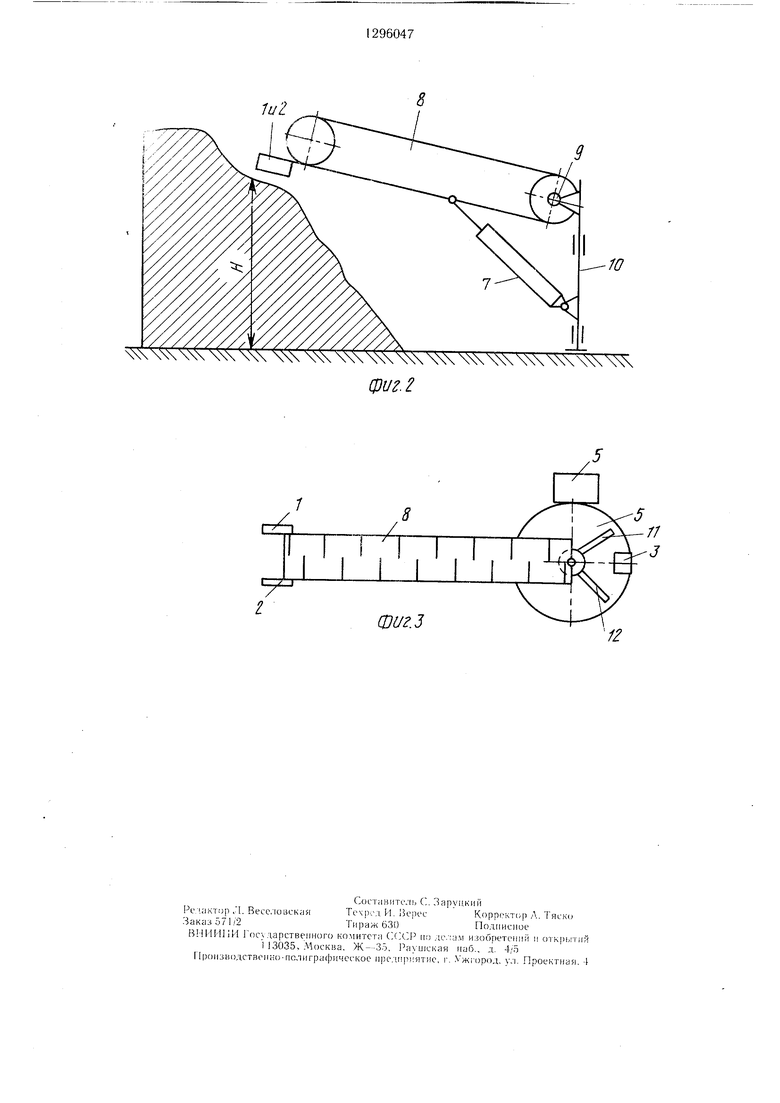
На фиг.1 представлена структурная схема устройства; на фиг.2 - устройство с приводом для перемещения транспортера в вертикальной плоскости, вид сбоку; на фиг.З - устройство с приводом для перемещения вокруг горизонтальной оси, вид сверху.
Устройство управления транспортером- загрузчиком картофеля состоит из чувствительных элементов 1 и 2 уровня насыпи картофеля, переключателя 3 с контактами 3-1 - 3-4, импульсного элемента 4, привода 5, импульсного элемента 6, привода 7, транспортера 8, закрепленного на горизон10
15
фиксированном положении, 3-1 разомкнут, а 3-2 замкнут. Контакт 3-3 выполнен в виде перекидного контакта и обеспечивает реверс привода 5. Контакт 3-4 выполнен в виде подвижного и неподвижного контактов, которые замыкаются в момент перехода штифта переключателя 3 из одного крайнего положения в другое. В крайних положениях штифта переключателя 3 контакты 3-4 разомкнуты.
Импульсный элемент 4 выполнен в виде мультивибратора или двух реле времени, могут быть использованы и другие импульсные элементы с постоянной длительностью импульса и паузы.
Привод 5 выполнен в виде электродвигателя с трансмиссией и поворотным устройством и обеспечивает поворот транспортера вокруг вертикальной оси. Привод 5 реверсивный, направление перемещения транспортера определяется положением щтифта
тальной 9 и вертикальной 10 осях, и конце- 20 переключателя 3. Привод 5 может быть гид- вых упоров 11 и 12.равлическим или другого типа.
Элементы 1,2,3-1, 3-2, 3-3, 4, 5 и 8 об-Импульсный элемент 6 выполнен так же.
разуют цепь управления транспортером о .в горизонтальной плоскости. Элементы 1 и 3-1 включены последовательно, и выход 3-1 подключен к входу 4. Элементы 2 и 3-2 вклю- 25 чены последовательно, и выход 3-2 подключен к входу 4. Элементы 4, 3-3, 5 и 8 включены последовательно. Перемещение транспортера по угловой координате а механически передается на вход переключателя 3.
как и импульсный элемент 4. Длительность импульсов и пауз элементов 4 и б настраивается оператором во время эксплуатации. Привод 7 выполнен в виде гидроцилиндра, управляемого гидроэлектрозолотником. В качестве привода 7 могут быть использованы и другие виды приводов, в том числе и электропривод с троссовой передачей. Транспортер 8 может поворачиваться
Элементы 3-4, 6, 7 и 8 образуют цепь вокруг вертикальной 10 и горизонтальной 9 упавления транспортером в вертикальной плоскости и соединены последовательно. Перемещение транспортера 8 по вертикальной координате Нт механически подается на вход элементов 1 и 2.
Чувствительные элементы 1 и 2 выполнены в виде шарнирно закрепленных подпружиненных пластин и микровыключателей и установлены таким образом, что при образовании конусообразной насыпи с вершиной, совпадающей с продольной осью 40 руемой насыпи.
транспортера 8, под действием клубней наУстройство работает следующим образом.
В начальный момент времени, когда высота насыпи Н равна нулю, оператор устанавливает транспортер на минимальной высоте над уровнем площадки, устанавливает
35
осей, в результате чего изменяются его горизонтальная координата - угол поворота а и вертикальная координата его выгрузного конца - высота Нт. С транспортером 8 связаны концевые упоры 11 и 12, которые при его повороте поворачиваются в горизонтальной плоскости и в крайних положениях воздействуют на штифт переключателя 3. Оператор переставляет концевые упоры, обеспечивая ширину формипластины элементов 1 и 2 они отклоняются в направлении от продольной оси транспортера 8, преодолевая усилие соответствующих пружин, и включают контакты 3-1 или 3-2.
Чувствительные элементы 1 и 2 могут быть 45 упоры 11 и 12 в соответствии с требуемой шириной насыпи и жестко фиксирует их. Штифт переключателя 3 находится при этом в одном из крайних фиксированных, положений (например контакт 3-1 замкнут, 3-2 разомкнут, 3-3 обеспечивает перемещение транспортера в сторону от чувствительного элемента 2, который отключен контактом 3-2). Контакт 3-4 разомкнут. После начала формирования насыпи высота ее Н увеличивается до тех пор, пока клубни не
изготовлены в виде, например, стержней, связанных с микровыключателями, или резиновых полых шариков, связанных с пневмо- реле, и т. д.
Переключатель 3 закреплен неподвижно на кронштейне и выполнен в виде многоконтактного переключателя с крайними фиксированными положениями и контактами 3-1-3-4. Контакты 3-1 и 3-2 выполнены в виде включающих контактов, при этом, когда
50
мой шириной насыпи и жестко фиксирует их. Штифт переключателя 3 находится при этом в одном из крайних фиксированных, положений (например контакт 3-1 замкнут, 3-2 разомкнут, 3-3 обеспечивает перемещение транспортера в сторону от чувствительного элемента 2, который отключен контактом 3-2). Контакт 3-4 разомкнут. После начала формирования насыпи высота ее Н увеличивается до тех пор, пока клубни не
щтифт переключателя 3 находится в одном начнут действовать на чувствительный элефиксированном положении, контакт3-1 замк-мент 1, сигнал от которого подается через
нут, а 3-2 разомкнут, и наоборот, когдаконтакт 3-1 на импульсный элемент 4. Имштифт переключателя 3 находится в другомпульсный сигнал от элемента 4 через кон
фиксированном положении, 3-1 разомкнут, а 3-2 замкнут. Контакт 3-3 выполнен в виде перекидного контакта и обеспечивает реверс привода 5. Контакт 3-4 выполнен в виде подвижного и неподвижного контактов, которые замыкаются в момент перехода штифта переключателя 3 из одного крайнего положения в другое. В крайних положениях штифта переключателя 3 контакты 3-4 разомкнуты.
Импульсный элемент 4 выполнен в виде мультивибратора или двух реле времени, могут быть использованы и другие импульсные элементы с постоянной длительностью импульса и паузы.
Привод 5 выполнен в виде электродвигателя с трансмиссией и поворотным устройством и обеспечивает поворот транспортера вокруг вертикальной оси. Привод 5 реверсивный, направление перемещения транспортера определяется положением щтифта
переключателя 3. Привод 5 может быть гид- равлическим или другого типа.
вокруг вертикальной 10 и горизонтальной 9
руемой насыпи.
осей, в результате чего изменяются его горизонтальная координата - угол поворота а и вертикальная координата его выгрузного конца - высота Нт. С транспортером 8 связаны концевые упоры 11 и 12, которые при его повороте поворачиваются в горизонтальной плоскости и в крайних положениях воздействуют на штифт переключателя 3. Оператор переставляет концевые упоры, обеспечивая ширину форми50
мой шириной насыпи и жестко фиксирует их. Штифт переключателя 3 находится при этом в одном из крайних фиксированных, положений (например контакт 3-1 замкнут, 3-2 разомкнут, 3-3 обеспечивает перемещение транспортера в сторону от чувствительного элемента 2, который отключен контактом 3-2). Контакт 3-4 разомкнут. После начала формирования насыпи высота ее Н увеличивается до тех пор, пока клубни не
начнут действовать на чувствительный элетакт 3-3 подается на привод 5, который поворачивает транспортер 8 вокруг вертикальной оси 10 в сторону чувствительного элемента 1, последний удаляется от насыпи, и клубни перестают на него действовать. Величина поворота транспортера 8 определяется длительностью импульса элемента 4 и находится в диапазоне от половины до полной ширины ленты. Величина поворота за один импульс настраивается оператором путем установки длительности импульса элемента 4. После того как высота насыпи увеличится, клубни снова начинают действовать на элемент 1 и через цепь 3-1,4, 3-3, 5 на транспортер 8. Транспортер 8 снова поворачивается вокруг вертикальной оси до тех пор, пока упор 11 не нажмет на штифт переключателя 3 (фиг.З).
Таким образом, при повороте транспортера 8 в одну сторону образуется широкая насыпь с постоянной высотой по всей ширине.
При воздействии упора 11 на штифт переключателя 3 последний переходит из одного фиксированного положения в другое, при этом контакты 3-1 размыкаются, 3-2 включаются, 3-3 переключаются таким образом, что
10
15
20
необходимой высоты. После этого оператор отключает автоматику и, если применяется самоходный транспортер, переводит его на новое место.
Формула изобретения
Устройство управления транспортером- загрузчиком картофеля, включаюш.ее транспортер, закрепленный на горизонтальной и вертикальной осях, чувствительный элемент уровня насыпи, переключатель с двумя фиксированными положениями и контактом реверса привода, поворачивающего транспортер вокруг вертикальной оси, цепь управления транспортером в горизонтальной плоскости, содержаш.ую последовательно соединенные импульсный элемент и контакт реверса привода и привод, поворачивающий транспортер вокруг вертикальной оси, цепь управления транспортером в вертикальной плоскости, содержащую последовательно соединенные импульсный элемент и привод поворота транспортера вокруг горизонтальной оси, правый и левый ограничители угла поворота транспортера вокруг вертикальной оси, действующие на щтифт переключапроисходит реверс привода 5. При перехо- 25 теля, отличающееся тем, что, с целью сни- де штифта переключателя 3 из одного фик- жения механических повреждений картофеля
сированного положения в другое кратковременно включаются контакты 3-4, которые подают сигнал на элемент 6, привод 7 и транспортер 8. Под действием этого сигнала привод 7 приподнимает транспортер 8, и высота его расположения над насыпью увеличивается. Высота подъема транспортера 8 в крайних по ширине точках насыпи определяется длительностью импульса элемента 6, которую устанавливает оператор.
После переключения контактов 3-4 пере- ключателя 3 транспортер 8 начинает управляться датчиком 2 через контакт 3-2, а датчик 1 отключается контактами 3-1. Поворот транспортера при возрастании насыпи теперь происходит в сторону датчика 2, так как сигнал, поступаюший от датчика 2 на контакты 3-2 и элемент 4, реверсируется контактами 3-3. Происходит формирование широкой насыпи с новой высотой. При подходе к другому краю насыпи упор 12 переводит штифт переключателя 3 в другое положение. При этом за счет сигнала от контакта 3-4 происходит подъем транспортера на новый уровень и осуществляется реверс привода 5. Так происходит до тех пор, пока не будет сформирована насыпь
0
5
0
необходимой высоты. После этого оператор отключает автоматику и, если применяется самоходный транспортер, переводит его на новое место.
Формула изобретения
Устройство управления транспортером- загрузчиком картофеля, включаюш.ее транспортер, закрепленный на горизонтальной и вертикальной осях, чувствительный элемент уровня насыпи, переключатель с двумя фиксированными положениями и контактом реверса привода, поворачивающего транспортер вокруг вертикальной оси, цепь управления транспортером в горизонтальной плоскости, содержаш.ую последовательно соединенные импульсный элемент и контакт реверса привода и привод, поворачивающий транспортер вокруг вертикальной оси, цепь управления транспортером в вертикальной плоскости, содержащую последовательно соединенные импульсный элемент и привод поворота транспортера вокруг горизонтальной оси, правый и левый ограничители угла поворота транспортера вокруг вертикальной оси, действующие на щтифт переключа5 теля, отличающееся тем, что, с целью сни- жения механических повреждений картофеля
и улучшения условии труда оператора, оно снабжено дoпOv нитeльным чувствительным элементом уровня насыпи, а переключатель снабжен тремя дополнительными контактами, первый из которых замкнут, а второй разомкнут при одном фиксированном положении переключателя, при другом фиксированном положении первый контакт разомкнут, а второй замкнут, третий дополнительный контакт замкнут на момент перехода переключателя из одного фиксированного положения в другое, при этом чувствительные элементы уровня насыпи закреплены у выгрузного конца транспортера по бокам его, вынесены, вперед и обращены в сторону продольной оси, выход первого чувствительного элемента через первый дополнительный контакт и выход второго чувствительного элемента через второй дополнительный контакт переключателя соединены с приводом поворота транспортера вокруг вертикальной оси через последовательно включенные импульсный элемент и контакт реверса, а третий дополнительный контакт переключателя соединен с приводом поворота транспортера вокруг горизонтальной оси.
w
Ч 4 V 4
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления транспортером-загрузчиком картофеля | 1989 |
|
SU1776367A1 |
| Система автоматического управления загрузкой картофеля из бункера в автотранспорт | 1990 |
|
SU1755782A1 |
| Устройство для регулирования положения транспортера-загрузчика | 1985 |
|
SU1327825A1 |
| Устройство для загрузки сыпучих грузов в емкости | 1989 |
|
SU1818290A1 |
| Передвижной ленточный конвейер | 1985 |
|
SU1326509A1 |
| Чувствительный элемент положения транспортера-загрузчика картофеля | 1989 |
|
SU1776365A2 |
| Датчик уровня | 1990 |
|
SU1797794A1 |
| Устройство для регулирования положения транспортера загрузчика картофеля | 1983 |
|
SU1155236A1 |
| Система управления электроприводами транспортеров для хранилищ и буртов | 1991 |
|
SU1757519A1 |
| Устройство автоматического направления движения транспортного средства с фильтром помех | 1984 |
|
SU1311640A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - снижение механических повреждений картофеля и улучшение условий труда оператора. Устройство содержит цепи управления транспортером в горизонтальной плоскости, включающие чувствительные элементы 1 и 2, переключатель 3, импульсный элемент 4, привод 5, цепь управления транспортером в вертикальной плоскости, включающую другие контакты переключателя 3. импульсный элемент 6, привод 7 и транспортер 8. Транспортер 8 при помощи чувствительных элементов 1 и 2 управляется в горизонтальной плоскости. При подходе к крайним горизонтальным положениям транспортер 8 приподнимается на постоянную высоту. При работе устройства управления транспортер 8 формирует насыпь картофеля с постоянной высотой по всей ширине насыпи. 3 ил. ьо со 05 О 
7
8
I . Т ТЛ
ф1/г.З
| Колчин Н | |||
| Н., Ариничев А | |||
| Н., Лукин В | |||
| Г | |||
| Перспективы автоматизации машин для загрузки картофелехранилищ.-Трактора и сельскохозяйственные машины | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
