Изобретение относится к лесной промышленности и может быть использовано в лесозаготовительных машинах.
Цель изобретения - повышение надежности привода рабочего органа лесозаготовительной машины.
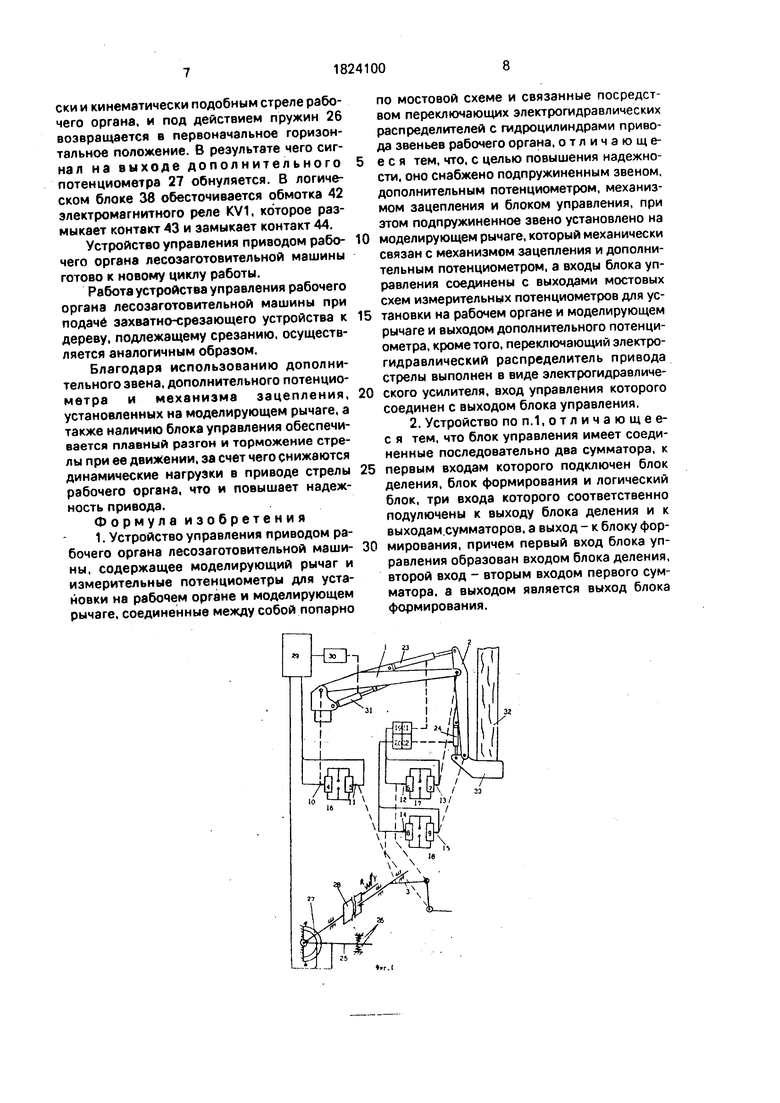
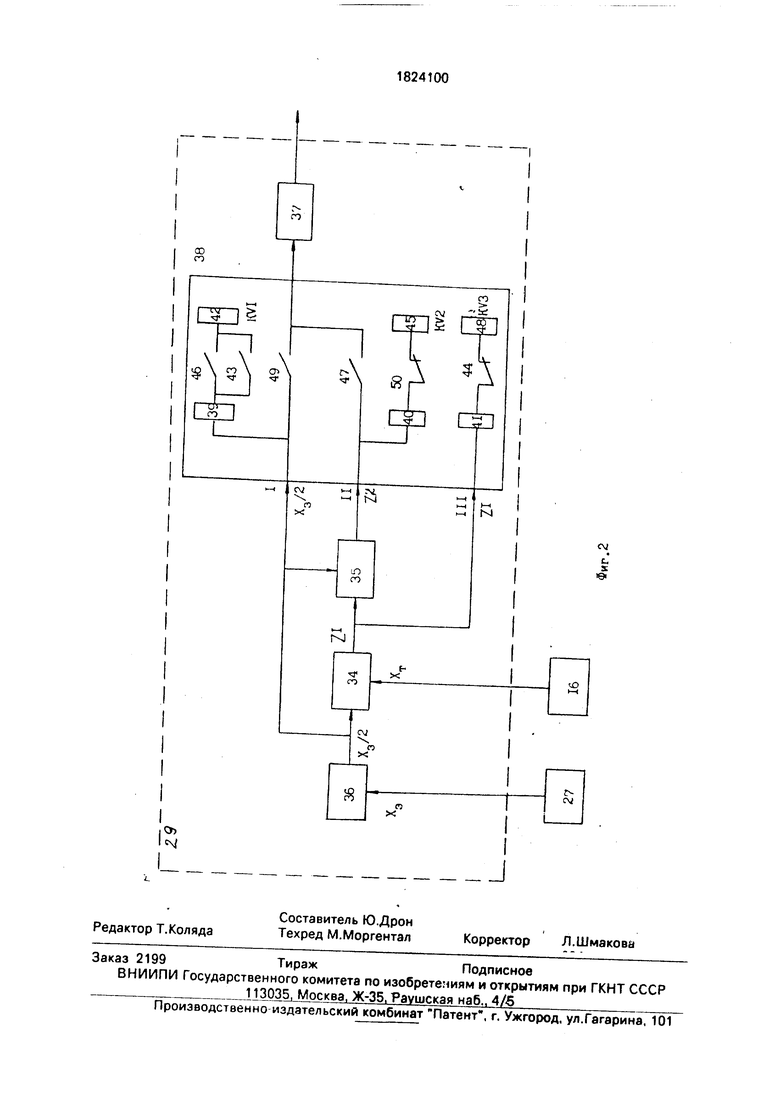
На фиг.1 представлено устройство управления приводом рабочего органа лесозаготовительной машины (общий вид). На фиг.2 приведена функциональная схема блока управления.
Устройство управления приводом рабочего органа лесозаготовительной машины (фиг.1) содержит рабочий орган, включающий шарнирно-сочленные стрелу 1 и рукоять 2 с захватно-срезающим устройством, и геометрически и кинематически подобный ему моделирующий рычаг 3, на шарнирах кинематических пар которых установлены потенциометры 4-9 с движками 10-15. Потенциометры 4и5, 6и7, 8и9 включены попарно в мостовые схемы 16 - 18. Мостовые схемы 17 и 18 через усилители 19 и 20 соединены с гидравлическими распределителями 21 и 22, связанными с соответствующими гидроцилиндрами 23 и 24 привода звеньев рабочего органа.
Устройство управления снабжено дополнительным звеном 25 с возвратными пружинами 26 и дополнительным потенциометром 27, механически связанными между собой и установленными на моделирующем рычаге 3, а также механизмом 28 зацепления, механически связанным с дополнительным звеном 25 и моделирующим рычагом 3, и содержит блок 29 управления, входы которого соединены соответственно с выходом мостовой схемы 16 и с выходом дополнительного потенциометра 27.
Устройство также содержит электрогидравлический распределитель 30, связанный посредством трубопроводов с гидроцилиндром 31 привода стрелы и выполненный в виде электрогидравлического усилителя, вход управления которого связан с выходом блока 29 управления. Позицией 32 обозначен обрабатываемый объект (дерево), а поЁ
00
то
Ј
о о
зицией 33 - эахвэтно-среэающее устройство рабочего органа..
Механизм 28 зацепления может быть выполнен в виде электромеханической фрикционной передачи с электромагнитом Y.
Блок 29 управления содержит соединенные между собой последовательно два сумматора 34 и 35, подключенный к их первым входам, блок 37 формирования и логический блок 38, три входа которого соответственно подключены к выходу блока
36деления и выходам сумматоров 34 и 35, а выход - к блоку 37 формирования, причем первый вход блока 29 управления образован входом блока 36 деления и связан с выходом дополнительного потенциометра 27, второй вход образован вторым входом сумматора 34 и связан с выходом мостовой схемы 10, а выход образован выходом блока
37формирования.
Блок 37 формирования представляет собой электронное устройство с заданным законом преобразования входного сигнала и может быть выполнен на операционных усилителях.
Логический блок 38 содержит усилители 39. 40, 41, электромагнитное реле KVi с обмоткой 42, замыкающим контактом 43 и размыкающим контактом 44, электромагнитное реле KV2 с обмоткой 45 и размыкающими контактами 46 и 47 и электромагнитное реле KVa с обмоткой 48, замыкающим контактом 49 и размыкающим контактом 50.
Устройство управления приводом рабочего органа лесозаготовительной машины работает следующим образом.
Рабочий орган с установленным на его конце захватно-срезающим устройством 33 наводится на дерево, подлежащее срезанию, после чего происходит захват и срезание дерева. При этом начальное положение звеньев рабочего органа лесозаготовительной машины соответствует положению звеньев моделирующего рычага 3 (фиг.1). Подвижный контакт дополнительного звена 25 моделирующего рычага занимает среднее положение на потенциометре 27. Перемещение звеньев моделирующего рычага 3 задает конечное положение захватно-сре- зающему устройству 33 с деревом 32 относительно лесозаготовительной машины, т.е. конечное положение звеньев рабочего органа. При этом поворачивается и дополнительное звено 25, которое перед началом перемещения моделирующего рычага механизмом зацепления 28 связывается со звеном, геометрически и кинематически подобным стреле 1 рабочего органа. Зацепление этих звеньев происходит в результате
подачи напряжения на электромагнит Y механизма зацепления.
Каждая мостовая схема 16, 17. 18 устройства управления, а также дополнительный потенциометр 27, установленный на моделирующем рычаге 3, имеются от источника постоянного тока. В результате перемещения звеньев моделирующего рычага изменяется положение движков 10, 12 и 14
потенциометров 4, 6 и 8, а также положение движка на дополнительном потенциометре 27 напряжение и полярность в диагонали каждого моста соответствует угловому рассогласованию между движками 10 и 11,12 и
5 13, 14 и 15 потенциометров 4 и 5, 6 и 7, 8 и 9 моделирующего рычага 3 и рабочего органа, а величина и полярность сигнала на выходе дополнительного потенциометра 27 соответствует угловому перемещению его
0 движка дополнительным звеном 25 относительно средней точки этого потенциометра. Сигналы рассогласования с мостовых схем 17 и 18 поступают на усилители 19 и 20, а сигналы с дополнительного потенциометра
5 27 и мостовой схемы 16 поступают соответственно на входы блока 29 управления. Последние пропорциональны заданному углу поворота стрелы относительно ее первоначального положения и равны между собой.
0БЛОК 29 управления работает следующим образом.
В блоке 36 деления сигнал Хз, поступающий с дополнительного потенциометра 27, делится пополам, т.е. на выходе блока
5 деления сигнал равен половине сигнала рассогласования мостовой схемы 16 перед началом движения стрелы. Этот сигнал передается на вход 1 логического блока 38 и в сумматоры 34 и 35 и остается неизменным
0 при перемещении звеньев рабочего органа. В сумматоре 34 и сигнала, поступающего с мостовой схемы 16 вычитается сигнал, поступающий с блока деления.
Таким образом, на выходе сумматора 34
5 сигнал Z1 равен Хт-Хз/2. Этот сигнал передается в сумматор 35 и на вход III логического блока. В сумматоре 35 их сигнала, поступающего с сумматора 34, вычитается сигнал, поступающий с блока деления, т.е.
0 сигнал равный Хт-Хз с выхода этого сумматора подается на вход 11 логического блока. Таким образом, перед началом движения стрелы на вход 1 логического блока подается сигнал Хз/2, на вход II - Z2 0, на вход III 5 Z1 Хз/2. Сигнал Z1 через усилитель 41 и размыкающий контакт 44 электромагнитного реле KV1 поступает на обмотку 48 электромагнитного реле KV3, что приводит к его включению, в результате чего размыкается контакт 50 и замыкается контакт 49,через
который сигнал с выхода блока 36 деления поступает в блок 37 формирования, где происходит его преобразование по заданному закону, т.е. формирование сигнала управления. Характеристика закона изменения сиг- нала управления представляет собой кривую с плавно нарастающей крутизной. В качестве заданного закона можно принять переходную характеристику, соответствующую интегрирующему звену с замедлени- ем, передаточная функция которого описывается выражением
W(p)K/(p(Tp+m где К - коэффициент усиления;
Т - постоянная времени;
р - оператор дифференцирования.
Сформированный сигнал управления с блока 29 поступает на вход управления электрогидравлического усилителя 30, который управляет гидроцилиндром 31. Одно- временно, посредством усилителей 19 и 20, сигналы рассогласования от мостовых схем 17 и 18 включают гидрораспределители 21 и 22, управляющие гидроцилиндрами 23 и 24. Гидроцилиндры 23, 24 и 31 приводят в движение звенья рабочего органа.
По мере передвижения звенья рабочего органа перемещают движки 11, 13 и 15 его потенциометров 5, 7 и 9 в направлении уменьшения сигналов рассогласования мо- стовых схем 16, 17 и 18.
Вследствие того, что характеристика сигнала управления на выходе блока 29 управления описывается кривой с плавно нарастающей крутизной, скорость штока гидроцилиндра 31 по мере его выдвижения возрастает, а стрела 1 разгоняется.
В результате перемещения (подъема) стрелы уменьшается сигнал Хт, поступающий с мостовой схемы 16 на сумматор 34, что приводит к пропорциональному уменьшению сигнала Z1 на его выходе и увеличению сигнала Z2 на выходе сумматора 35. В момент достижения стрелы половины за- данцрго моделирующим рычагом 3 переме- щения сигнал Хт рассогласования, поступающий с мостовой схемы 16, становится равным сигналу Хз/2 на выходе блока 36 деления, в результате чего сигнал Z1 на выходе сумматора 34 становится равным улю, а сигнал Z2 на выходе сумматора 35 становится равным Хз/2. В логическом блоке 38 обесточивается обмотка 48 электромагнитного реле KV3, которое размыкает контакт49 и замыкает контакт 50. Сигнал Z2 через усилитель 40 и контакт 50 поступает на обмотку 45 электромагнитного реле KV2, что приводит к его включению. В результате замыкаются контакты 46 и 47. При этом сигнал Хз/2 через усилитель 39 и контакт 46 подается на обмотку 42 электромагнитного реле KV1. что приводит к его включению, а сигнал Z2 через контакт 47 подается на вход блока 37 формирования. Электромагнитное реле KV1 при включении замыкает контакт 43, блокирующий контакт 46 и размыкает,контакт 44. Таким образом. в момент переключения стрелы 1 рабочего органа на торможение сигнал на входе блока 37 формирования не изменяется.
При дальнейшем перемещении стрелы сигнал Хт, поступающий с мостовой схемы 16 на сумматор 34, продолжает уменьшаться, что приводит к пропорциональному увеличению сигнала Z1 на выходе сумматора 34 и уменьшению сигнала Z2 на выходе сумматора 35, а следовательно, и к уменьшению сигнала управления на выходе блока 37 формирования, т.е. цепочка передачи сигнала от мостовой схемы 16 через умматор 34 к сумматору 35 представляет соой отрицательную обратную связь по перемещению стрелы. В результате этого характеристика сигнала управления на выходе блока 29 управления представляет собой кривую с плавно убывающей крутизной, а скорость штока гидроцилиндра 31 по мере его дальнейшего выдвижения убывает, что приводит к торможению стрелы.
В момент достижения стрелой конечного положения, заданного моделирующим рычагом 3, сигнал Хт рассогласования, поступающий с мостовой схемы 16, становит- ся равным нулю, в результате чего сигнал Z1 на выходе сумматора 34 становится равным сигналу Хз/2, а сигнал Z2 на выходе сумматора 35 становится равным нулю. В логическом блоке 38 обесточивается обмотка 45 электромагнитного реле KV2, которая размыкает контакты 46 и 47, отключая тем самым вход блока 3/ формирования, т.е. в этот момент происходит останов стрелы. Таким образом, по сигналам блока 29 управления осуществляется плавный разгон и торможение стрелы рабочего органа.
Останов остальных звеньев рабочего органа, приводимых в движение гидроцилиндрами 23 и 24, происходит при полном устранении рассогласования между движ- ками 12, 13 и 14, 15 соответствующих пар потенциометров 6,7 и 8,9 мостовых схем 17 и 18. При этом звенья рабочего органа занимают положения, соответствующие положению звеньев моделирующего рычага 3.
После останова рабочего органа посредством снятия напряжения с электромагнита Y отключается механизм зацепления 28. Дополнительное звено 25 моделирующего рычага 3 освобождается от механической связи с звеном, геометрически и кинематически подобным стреле рабочего органа, и под действием пружин 26 возвращается в первоначальное горизонтальное положение. В результате чего сиг- нал на выходе дополнительного потенциометра 27 обнуляется. В логическом блоке 38 обесточивается обмотка 42 электромагнитного реле KV1, которое размыкает контакт 43 и замыкает контакт 44.
Устройство управления приводом рабочего органа лесозаготовительной машины готово к новому циклу работы.
Работа устройства управления рабочего органа лесозаготовительной машины при подаче захватно-срезающего устройства к дереву, подлежащему срезанию, осуществляется аналогичным образом.
Благодаря использованию дополнительного звена, дополнительного потенциометра и механизма зацепления, установленных на моделирующем рычаге, а также наличию блока управления обеспечивается плавный разгон и торможение стрелы при ее движении, за счет чего снижаются динамические нагрузки в приводе стрелы рабочего органа, что и повышает надежность привода.
Формула изобретения
1. Устройство управления приводом рабочего органа лесозаготовительной машины, содержащее моделирующий рычаг и измерительные потенциометры для установки на рабочем органе и моделирующем рычаге, соединенные между собой попарно
по мостовой схеме и связанные посредством переключающих электрогидравлических распределителей с гидроцилиндрами привода звеньев рабочего органа, отличающее с я тем, что, с целью повышения надежности, оно снабжено подпружиненным звеном, дополнительным потенциометром, механизмом зацепления и блоком управления, при этом подпружиненное звено установлено на
моделирующем рычаге, который механически связан с механизмом зацепления и дополнительным потенциометром, а входы блока управления соединены с выходами мостовых схем измерительных потенциометров для установки на рабочем органе и моделирующем рычаге и выходом дополнительного потенциометра, кроме того, переключающий электрогидравлический распределитель привода стрелы выполнен в виде электрогидравлического усилителя, вход управления которого соединен с выходом блока управления.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок управления имеет соединенные последовательно два сумматора, к
первым входам которого подключен блок деления, блок формирования и логический блок, три входа которого соответственно подулючены к выходу блока деления и к выходам сумматоров, а выход - к блоку формирования, причем первый вход блока управления образован входом блока деления, второй вход - вторым входом первого сумматора, а выходом является выход блока формирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводомРАбОчЕгО ОРгАНА лЕСОзАгОТОВиТЕльНОйМАшиНы | 1979 |
|
SU818856A2 |
| Устройство управления приводом рабочего органа лесозаготовительной машины | 1976 |
|
SU609507A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для управления затворами гидросооружения | 1977 |
|
SU781771A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| ТОПЛИВОМЕР | 1991 |
|
RU2019794C1 |
Использование: изобретение относится к лесной промышленности, в частности к лесозаготовительным машинам. Сущность изобретения: устройство управления снабжено звеном 25 с возвратными пружинами 26 и потенциометром 27, механически связанными между собой и установленными на моделирующем рычаге 3, а также механизмом 28 зацепления, механически связанным с дополнитеяь- ным звеном 25 и моделирующим рычагом 3, и содержит блок управления 29, входы которого соединены с выходом мостовой схемы 16 и с выходом потенциометра 27. 1 з.п. ф-лы. 2 ил.
| Устройство управления приводомРАбОчЕгО ОРгАНА лЕСОзАгОТОВиТЕльНОйМАшиНы | 1979 |
|
SU818856A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
