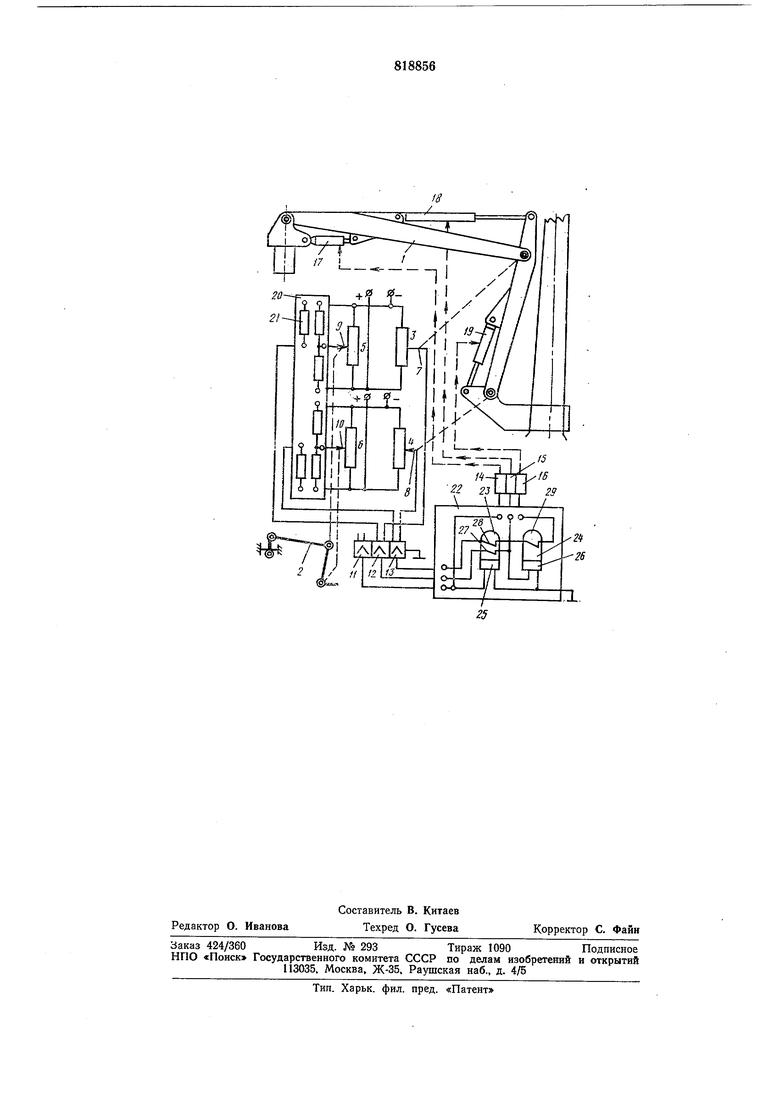
мостовая схема питается от источника постоявного тока, напряжение и полярность которого в диагонали каждого моста соответствует угловому расоогласойаяию между движками Я 7 и JO, 8 потенцИОметров -5,3 (И 6,4 моделирующего рычага 2 и рабочего органа /. Сигналы рассогласования посредством усилителей 11-13 включают соответствующие электрогидравлические распределители (14-16, управляющие гидроцилиндрами , которые, Б свою очередь, приводят в движение элементы рабочего органа / и одновременно .7 и 5 его потенциометров 3 и 4 в «аправлении уменьшения (рассогласования. Это движение .продолжается до полного устранения рассогласования между движками 7, 9 и 8, 10 соответствующих пар потенциометров 3, 5 } 4, €, что приводит к остановке звеньев рабочего органа /, при этом указанные звенья занимают положеяие, соответствующее положению звеньев моделирующего рычага 2. Для автоматизации повторяющихся операций, когда все или часть звеньев рабочеою органа переводится в строго фиксированное положение, лапрнмер при погрузке поваленного дерева на мащ-и-ну или при переводе рабочего органа ИЗ рабочего положения в транспортное и обратно, включается та ил,и иная программа с использованием программного блока 20. При этом, в зависимости от конкретной ситуации, в плечи мостовых схем вместо одного или нескольких потенциометров моделирующего рычага 2 (или совместно с ними) включается необходимый набор .резисторов 21, вызывающих рассогласование мостов и включение соответствующих гидроцил.индров 17- 19. При определенном положения звеньев рабочего органа напряжение рассогласования в мостовых схемах исчезает, что вызывает отключение гидроцилиндров и остановку рабочего органа. Программа при этом отключается, и рабочий орган готов к выполнению следующей пропраммы или команд оператора посредством моделирующего рычага. При выполнении рабочих операций возникает необходимость в поочередном срабатывании отдельных или iBcex гид/роцилиндров привода рабочего орга)на в заданной последовательности, что обеспечивается подключением приоритетного логического блока 22. В этом случае, если обмотки 25 и 26 реле 23 и 24 включены в цепи управления Соответственно распределителей 14 и 15, причем размыкающий контакт 27 реле 23 включен последовательно в цепь распределителя 15, а размыкающие контакты 2 реле 23 и 29 реле 24 последовательно в цепь распределителя 16, то при одновременном рассогласовании мостовых схем первоначально произойдет включение распределителя 14 и срабатывание соответствующего гидроцилиндра 1/7, при этом распределители 15 и 16 будут отключены размыкающими контактами 27 и 215 при включении реле 23. После устранения рассогласования в мостовой схеме и исчезновения тока в цепи усилителя Произойдет отключение распределителя 14 я прекращение действия гидроцилиндра 17. Одновременно с этим контакты 27 и 28 после отключения реле 23 возвратятся в исходное положение, что обеспечит включение распределителя 15 и срабатывание гидроциливдра 1в, причем распределитель / по-прежнему будет отключен, «но уже размыкающим коитаектом 29 под действием обмотки 26 реле Q4. Только .после исчезновения тока в цепи усилителя 12 произойдет отключение распределителя 15 и прекращение действия гидроцилиндра ,18, что, в свою очередь, вызовет отключение реле 24 и замыкание контакта 29 реле 24, включение распределителя 16 и срабатывание гидрОЦилиядра 19, действие которого прекратится после устранения раосогласования в мостовой схеме « исчезновения тока в цепи усилителя ,13.
Требуемая последовательность .срабатывания гидроцилиндров привода рабочего органа / обеспечивается переключением или отключением отдельных реле приоритетного логического блока 22, причем работа последнего может осуществляться совместно как с программным блоком 20, так и при управлении моделирующим рычагом 2.
i Благодаря введению приоритетного логического блока, .обеспечивающего поочередное срабатывание гидроцилиндров привода рабочего органа в заданной последовательности, снижается вероятность поломок технологического оборудования, повыщается безопасность эксплуатации лесозаготовительной мащи1ны, надежность ъ работе ее технологического оборудования. Кроме того, упрощается управление рабочим органом.
Формула изобретения
Устройство управления приводом рабочего органа лесозаготовительной мащины по авт. св. № 609507, отличающееся тем, что, с целью повыщения надежности работы, устройство снабжено приоритетным логическим блоком, который включен в цепи управления электрогидравлических распределителей и выполнен преимущественно в виде набора электромагнитных реле с размыкающими контактами.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 609507, кл. А 01 G 23/08, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом рабочего органа лесозаготовительной машины | 1991 |
|
SU1824100A1 |
| Устройство управления приводом рабочего органа лесозаготовительной машины | 1976 |
|
SU609507A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ФУНКЦИИ ПОТЕНЦИОМЕТРОВ | 1966 |
|
SU188575A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от аварийного режима | 1985 |
|
SU1377955A1 |
| Регулятор | 1987 |
|
SU1425599A1 |
| Устройство для защиты реверсивного тиристорного электропривода постоянного тока | 1983 |
|
SU1100683A1 |
| Устройство для защиты трехфазных электродвигателей от перегрузки и обрыва фазы | 1989 |
|
SU1670735A1 |
| Устройство управления весовым непрерывным дозированием | 1977 |
|
SU746199A1 |
| Рабочий орган для уплотнения балласта железнодорожного пути | 1983 |
|
SU1114716A1 |