Изобретение относится к технике магнитной записи, а именно к автоматическим механизмам подачи головок по заданным адресам.
Целью изобретения является повышение надежности устройства за счет исключения возможности возникновения удара при аварийных ситуациях вблизи ограничителей рабочего хода.
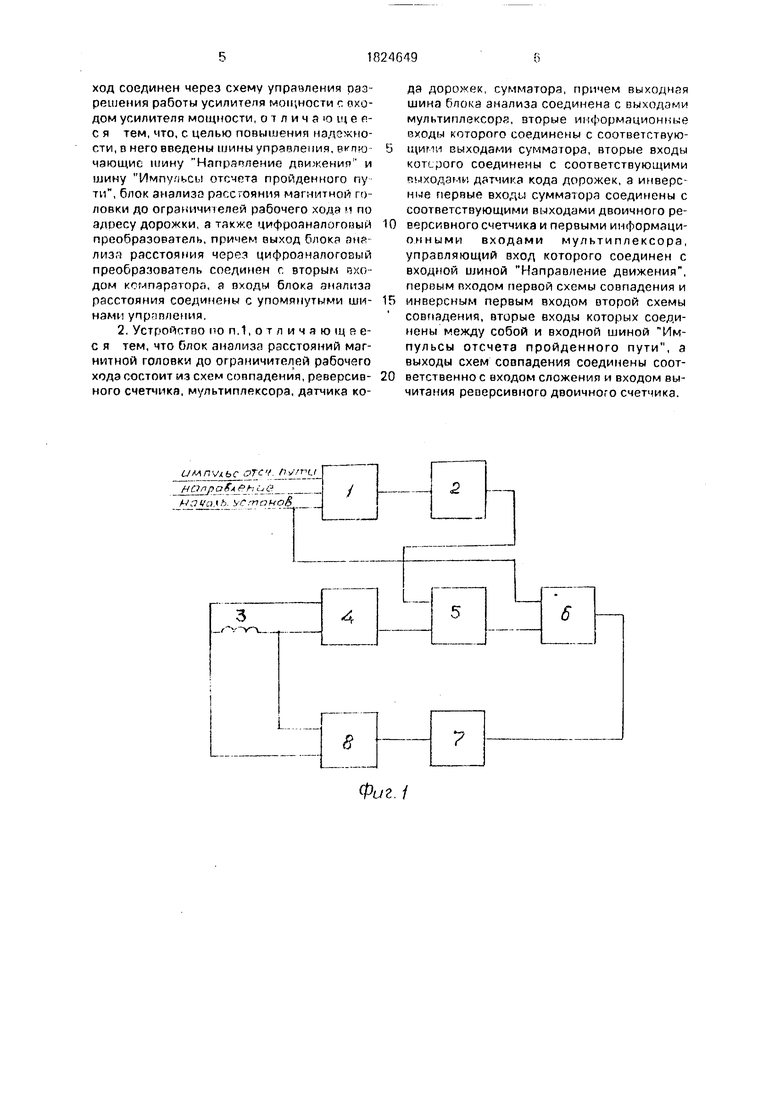
На фиг. 1 представлена функциональная схема устройства.
Устройство, изображенное на фиг.1, содержит входные шины управления, включающие шину Начальная установка, шину Направление движения и шину Импульсы отсчета пройденного пути, блока анализа расстояния до ограничителей рабочего
хода 1, цифроаналоговый преобразователь 2. исполнительный двигатель звуковой катушки 3, детектор скорости 4, компаратор напряжения 5. триггер опасной скорости 6, схему управления разрешением работы усилителя мощности 7 и собственно усилитель мощности 8. Все входы устройства соединены с блоком анализа расстояния 1, а вход начальной установки еще и с входом сброса триггера опасной скорости 6. Выход блока анализа расстояния 1 через цифроаналоговый преобразователь 2 соединен с вторым входом компаратора 5, первый вход которого через детектор скорости 4 соединен с катушкой исполнительного двигателя 3, Выход компаратора 5 подключен к уста новки триггера 6, выход которого через
00
Ю Јь О
Јь
Ю
схему управления разрешением работы усилителя мощности 7 и собственно усилитель мощности 8 подключен к обмотке исполнительного двигателя 3.
Устройство работает следующим образом. Сигнал начальной установки (в НМД являющийся сигналом установки на нулевой цилиндр) приводит в нулевое состояние триггер опасной скорости 6 и блок анализа расстояния до ограничителей рабочего хода 1. С приходом команды на начало движения устанавливается соответствующий уровень сигнала Направление, например Вперед. В этом случае блок анализа расстояния 1 формирует на своем выходе мак- симальний цифровой код, т.к. до переднего упора максимальное расстояние. В процессе перемещения поступающие на вход блока анализа расстояния 1 импульсы отсчета пройденного пути уменьшают значение выходного кода с выхода блока анализа расстояния1,Цифроаналоговый преобразователь 2 преобразует код с выхода блока анализа расстояния до ограничителя рабочего хода в уровень напряжения, который поступает на компаратор 5, в виде опорного напряжения. Таким образом, порог формирования сигнала опасной скорости по мере приближения к ограничителю рабочего хода снижается и тем самым уменьшается величина допустимой скорости движения. Детектор скорости 4 формирует сигнал действительной скорости перемещения, которая сравнивается с допустимой скоростью движения на компараторе 5. При превышении допустимой скорости движения компаратор б формирует сигнал опасной скорости. Сформированный сигнал опасной скорости устанавливает триггер 6 опасной скорости в состояние аварии, который в свою очередь через схему управления разрешением работы усилителя мощности 7 выключает усилитель мощности 8. При этом сигнал опасной скорости может формироваться как при наибольшем расстоянии до ограничителей рабочего хода (максимальное значение допустимой скорости), так и при наименьшем расстоянии (минимальное значение допустимой скорости).
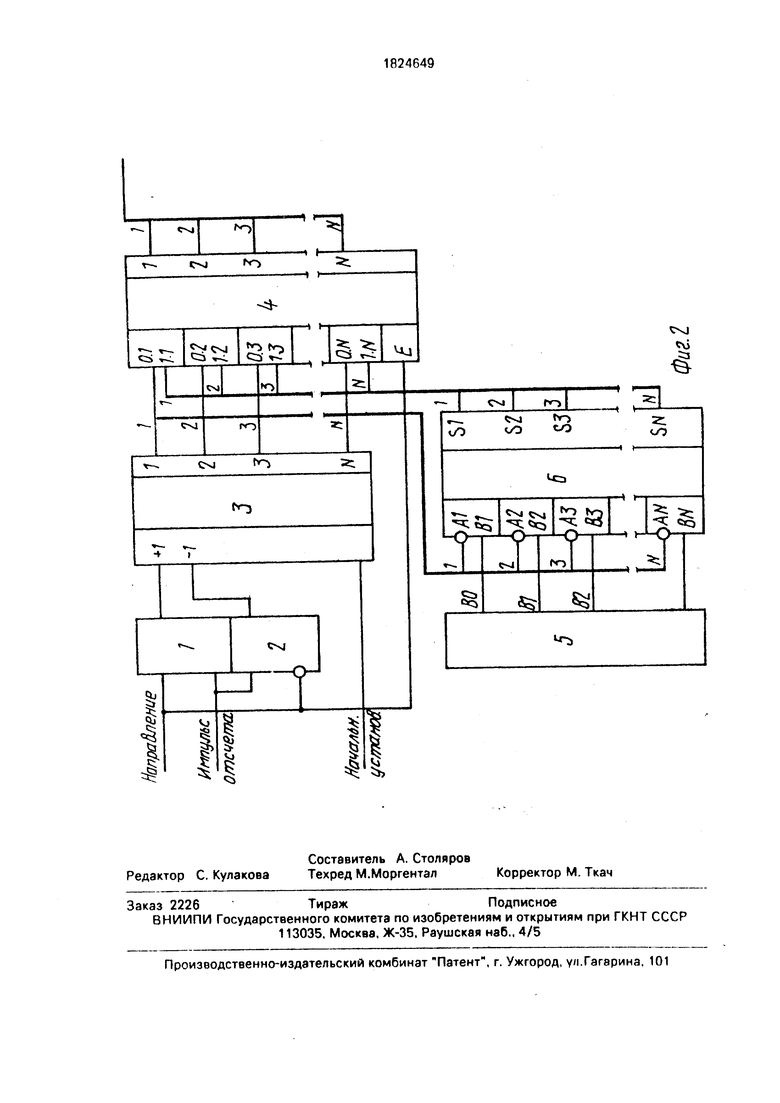
На фиг.2 изображена электрическая схема одного из вариантов блока анализа расстояния 1 до ограничителей рабочего хода.
Схема блока состоит из схемы совпадения 1, схемы совпадения 2, реверсивного счетчика 3, мультиплексора 4, датчика кода дорожек 5 и сумматора 6. Схема работает следующим образом. Импульсы отсчета, соответствующие сигналу пересечения дорожки магнитной головкой, поступают на
суммирующий вход счетчика 3 при движении магнитных голосок вперед (т.е. при наличии сигнала на шине Направление) или на вход вычитания при движении магнитных
головок назад (т.е. при отсутствии сигнала на шине Направление). Таким образом, на счетчике 3 фиксируется текущий адрес дорожки, над которой находится магнитная головка. Так как расстояние между магнит0 ной головкой и задним упором примерно соответствует расстоянию между нулевой дорожкой и фактическим адресам дорожки, над которой в настоящий момен г находится магнитная головка, то код на прямых выхо5 дах счетчика при движении назад соответствует расстоянию между магнитной гологжой и задним упором. Данный код с прямых выходов счетчика 3 передается при движении назад через мультиплексор 4 на выходную
0 шину блока. Код, соответствующий расстоянию между магнитной головкой и передним ограничителем хода, формируется с помощью сумматора 6 по информации, поступающей с выходов счетчика 3 и датчика кода
5 дорожек 5 Датчик кода дорожек обеспечивает передачу на вход сумматора 6 двоичного кода числа дорожек на поверхности магнитного диска. Число дорожек определяется типом конкретною нлкопптеля. Дяг0 чик кода может быть реализован с помощью стандартного коммутационного оборудопа- ния, набора перемычек и т.д., обеспечивающих подачу на вход сумматора G уровней логических 1 и О в соответствии с задан5 ным кодом, При движении вперед код, соответствующий расстоянию между магнитной голоокой и передним упором, передается через мультиплексор 4 но выходную шину блока. Описанный выше алгоритм работы
0 блока анализа расстояния до ограничителен рабочего хода легко реализуется как аппаратным, так и программным методами.
Выполненное в соответствии с настоящим изобретением устройство реализует
5 следующие преимущества: исключается движение подвижных частей позиционирующего механизма «близи ограничителей рабочего хода с опасными скоростями, приводящими к аварийным ситуациям,
0 Формула изобретения
1. Устройство блокировки опасной скорости движения позиционирующего механизма, содержащее исполнительный двигатель, обмотка которого соединена с
5 выходом усилителя мощности и через детектор скорости с первым входом компаратора опасной скорости, выход которого соединен с установочным входом триггера опасной скорости, вход сброса которого соедмнен с входной шиной начальной установки, я выход соединен через схему управления оэз- решения работы усилителя мо цности с охо- дом усилителя мощности, отличающее- с я тем, что, с целью повышения надежности, в него введены шины управления, вкпю- чающие шину Направление движении и шину Импу.чьсы отсчета пройденного пу ти, блок анализа расстояния магнитной головки до ограничителей рабочего хода и по адресу дорожки, а также цифроаналоговый преобразователь, причем выход блока лиза расстояния через цифроаналоговый преобразователь соединен г. вторым входом компаратора, а входы блока анализа расстояния соединены с упомянутыми шинами управления.
2. Устройство по п.1, о т л и ч а ю щ R е- с я тем, что блок анализа расстояний магнитной головки до ограничителей рабочего хода состоит из схем совпадения, реверсивного счетчика, мультиплексора, датчика кода дорожек, сумматора, причем выходная шина блока анализа соединена с выходами мультиплексора, вторые информационные входы которого соединены с соответствующи пи выходами сумматора, вторые входы котсрого соединены с соответствующими исходами датчика кода дорожек, а инверсные первые входи сумматора соединены с соответствующими выходами двоичного ре0 версивного счетчика и первыми информационными входами мультиплексора, управляющий вход которого соединен с входной шиной Направление движения, первым входом первой схемы совпадения и
5 инверсным первым входом второй схемы совпадения, вторые входы которых соединены между собой и входной шиной Импульсы отсчета пройденного пути, а выходы схем совпадения соединены соот0 ветственнос входом сложения и входом вычитания реверсивного двоичного счетчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления позиционирующим механизмом накопителя на магнитных дисках | 1990 |
|
SU1707621A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Устройство для поиска зон информации на магнитном носителе | 1990 |
|
SU1780107A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Устройство для поиска зон информации на магнитном носителе | 1989 |
|
SU1712961A1 |
| Адаптивный аналого-цифровой преобразователь | 1985 |
|
SU1288910A1 |
Использование: изобретение относится к технике магнитной записи, а именно к автоматическим механизмам установки магнитных головок на заданный адрес. Сущность изобретения: в устройство, содержащее исполнительный двигатель, обмотка которого соединена с выходом усилителя мощности и через детектор скорости с первым входом ксмпаратора, оыход которого соединен с установочным входом триггера опасной скорости, вход сброса которого является входной шиной начальной установки, а выход соединен через схему управления разрешения работы усилителя мощности с входом усилителя мощности, введены шины управления Направление. Импульсы отсчета пройденного пути, блок анализа расстояния до ограничителей рабочего хода и цифроаналоговый преобразова- тель, причем выход блока анализа расстояния через цифроаналоговый преобразователь соединен с вторым входом компаратора, а входы блока анализа являются входными шинами устройства. 1 з.п. ф-лы. 2 ил. ел С
jy м ПУНЬ с ore ч jn yw-i
OfipofAfh ij Pj
HSVcub уСтаиаВ
4
./ v-V-Y.
L.
a
6
Фиг. 1
| Патент США № 4553181, кл.С 11 В 21/02, 1985 | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
