Изобретение относится к технике магнитной записи, а именно к устройствам управления приводом магнитных головок.
Цель изобретения - повышение надежности работы устройства за счет оптимизации распределения мощности управляющего сигнала в режиме торможения.
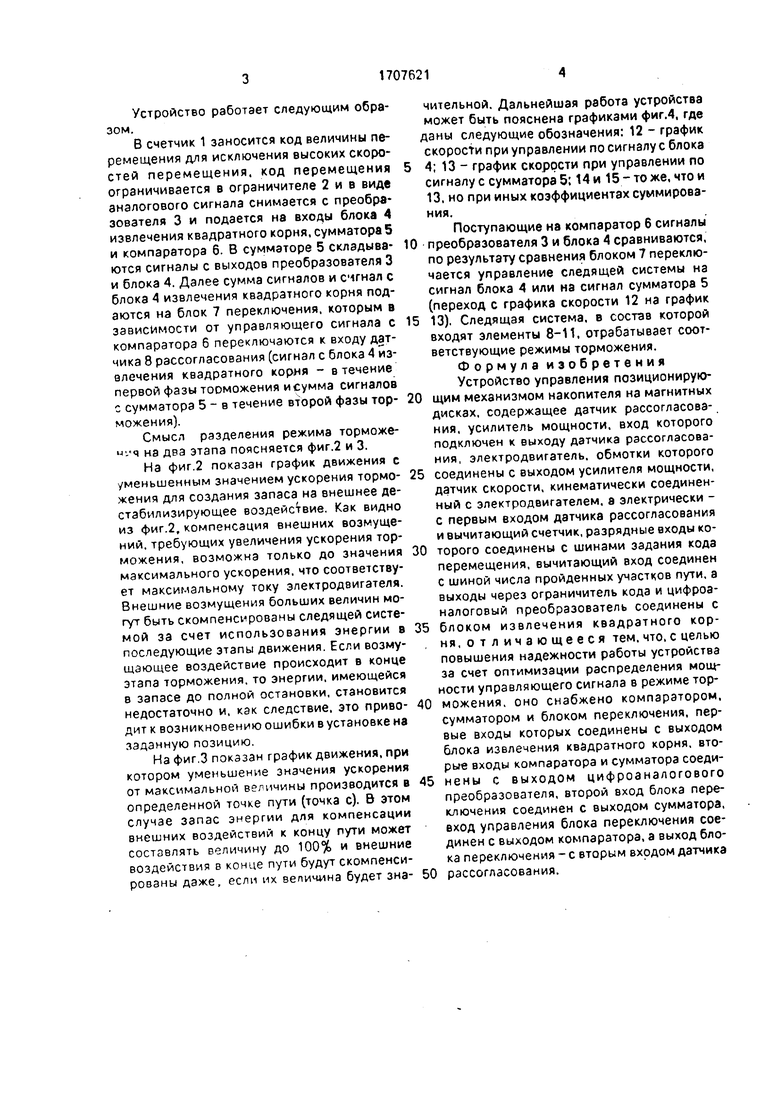
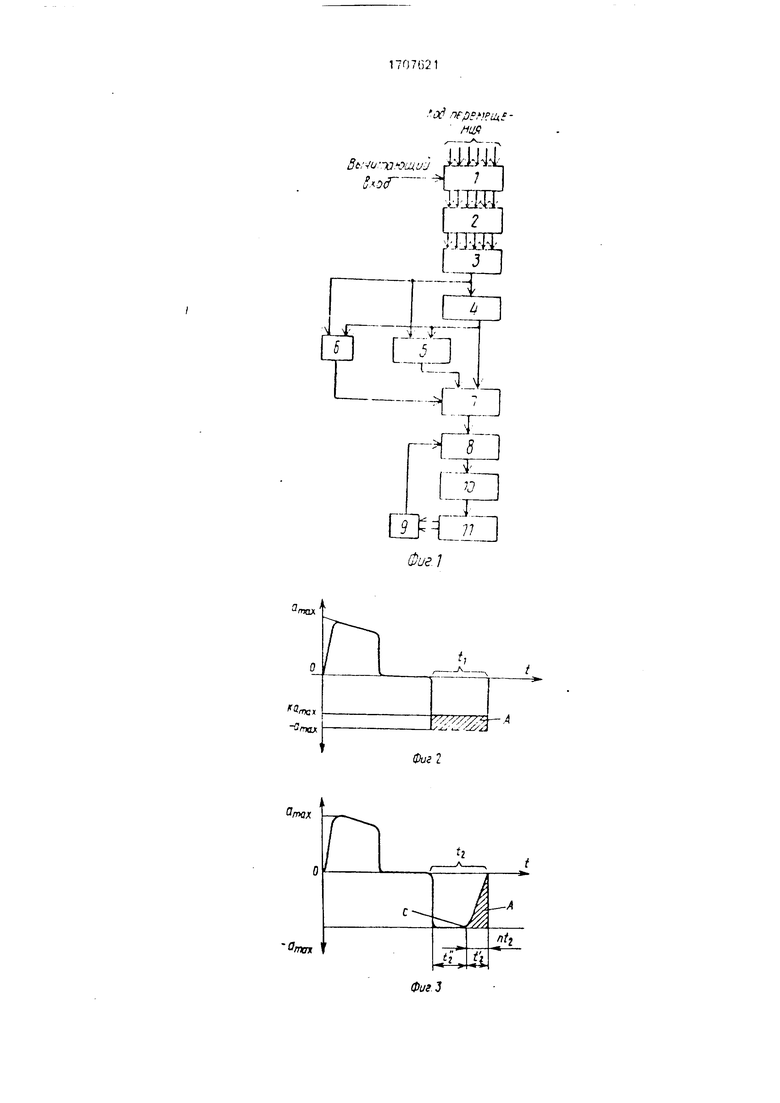
На фиг. 1 приведена блок-схема устройства; на фиг.2 и 3 - сигналограммы тока
управления; на фиг.4 - графики скорости привода.
Устройство содержит вычитающий счетчик 1, ограничитель 2 кода, цифроаналого- вый преобразователь 3, блок 4 извлечения квадратного корня, сумматор 5, компаратор 6, бг.ок 7 переключения, датчик 8 рассогласования, датчик 9 скорости, усилитель 10 мощности и электродвигатель 11.
Устройство работает следующим образом.
В счетчик 1 заносится код величины перемещения для исключения высоких скоростей перемещения, код перемещения ограничивается в ограничителе 2 и в виде аналогового сигнала снимается с преобразователя 3 и подается на входы блока 4 извлечения квадратного корня, сумматора 5 и компаратора 6. В сумматоре 5 складываются сигналы с выходов преобразователя 3 и блока 4. Далее сумма сигналов и сигнал с блока 4 извлечения квадратного корня подаются на блок 7 переключения, которым в зависимости от управляющего сигнала с компаратора 6 переключаются к входу датчика 8 рассогласования (сигнал с блока 4 из- алечения квадратного корня - в течение первой фазы тооможения и сумма сигналов с сумматора 5 - в течение второй фазы торможения).
Смысл разделения режима торможе- « -ч на два этапа поясняется фиг.2 и 3.
На фиг.2 показан график движения с уменьшенным значением ускорения торможения для создания запаса на внешнее дестабилизирующее воздействие. Как видно из фиг.2, компенсация внешних возмущений, требующих увеличения ускорения торможения, возможна только до значения максимального ускорения, что соответствует максимальному току электродвигателя. Внешние возмущения больших величин могут быть скомпенсированы следящей системой за счет использования энергии в последующие этапы движения. Если возмущающее воздействие происходит в конце этапа торможения, то энергии, имеющейся в запасе до полной остановки, становится недостаточно и, как следствие, это приводит к возникновению ошибки вустановке на заданную позицию.
На фиг.З показан график движения, при котором уменьшение значения ускорения от максимальной величины производится в определенной точке пути (точка с). В этом случае запас энергии для компенсации внешних воздействий к концу пути может составлять величину до 100% и внешние воздействия в конце пути будут скомпенсированы даже, если их величина будет значительной. Дальнейшая работа устройства
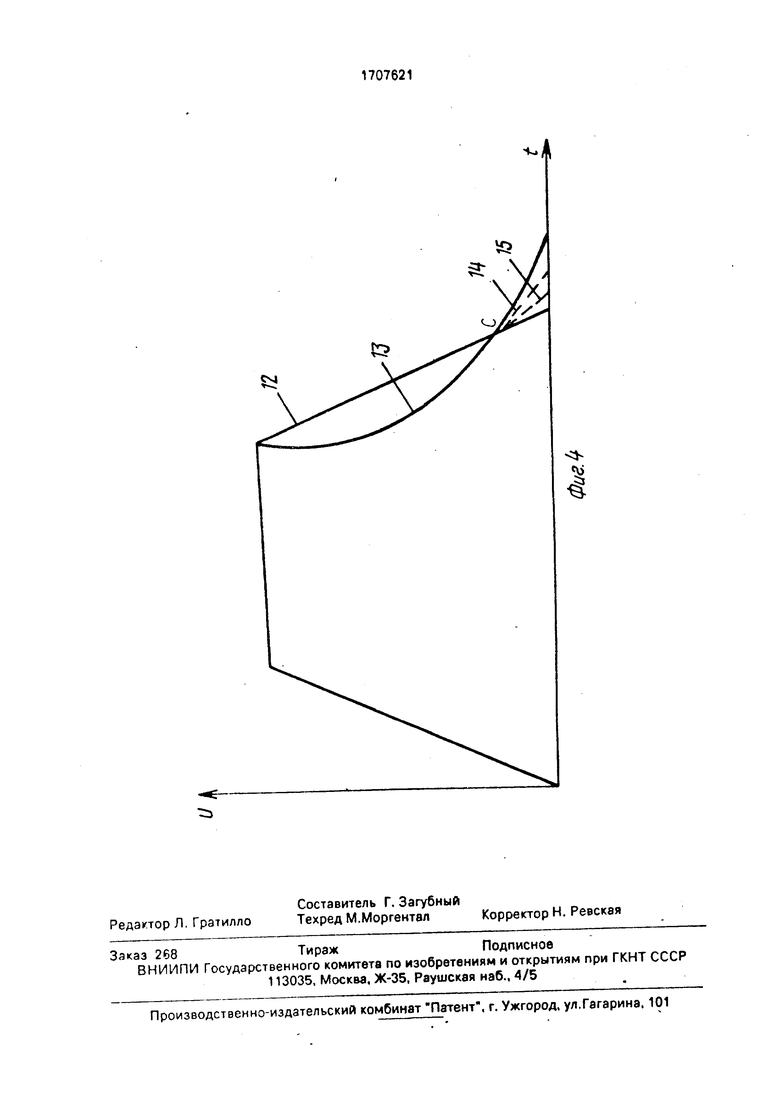
может быть пояснена графиками фиг.4, где
даны следующие обозначения: 12 - график
скорости при управлении по сигналу с блока
4; 13 - график скорости при управлении по сигналу с сумматора 5; 14 и 15 - то же, что и 13, но при иных коэффициентах суммирования.
Поступающие на компаратор 6 сигналы
преобразователя 3 и блока 4 сравниваются, по результату сравнения блоком 7 переключается управление следящей системы на сигнал блока 4 или на сигнал сумматора 5 (переход с графика скорости 12 на график
13). Следящая система, в состав которой входят элементы 8-11, отрабатывает соответствующие режимы торможения. Формула изобретения Устройство управления позиционирующим механизмом накопителя на магнитных дисках, содержащее датчик рассогласования, усилитель мощности, вход которого подключен к выходу датчика рассогласования, электродвигатель, обмотки которого
соединены с выходом усилителя мощности, датчик скорости, кинематически соединенный с электродвигателем, а электрически - с первым входом датчика рассогласования и вычитающий счетчик, разрядные входы которого соединены с шинами задания кода перемещения, вычитающий вход соединен с шиной числа пройденных участков пути, а выходы через ограничитель кода и цифроа- налоговый преобразователь соединены с
блоком извлечения квадратного кор- ня, отличающееся тем, что, с целью повышения надежности работы устройства за счет оптимизации распределения мощности управляющего сигнала в режиме торможения. оно снабжено компаратором, сумматором и блоком переключения, первые входы которых соединены с выходом блока извлечения квадратного корня, вторые входы компаратора и сумматора соединены с выходом цифроаналогового преобразователя, второй вход блока переключения соединен с выходом сумматора, вход управления блока переключения соединен с выходом компаратора, а выход блока переключения - с вторым входом датчика
рассогласования.
I
t Oi
o
ЛГГ
Нел
-.1
.-
--j
Ю
b.-
SN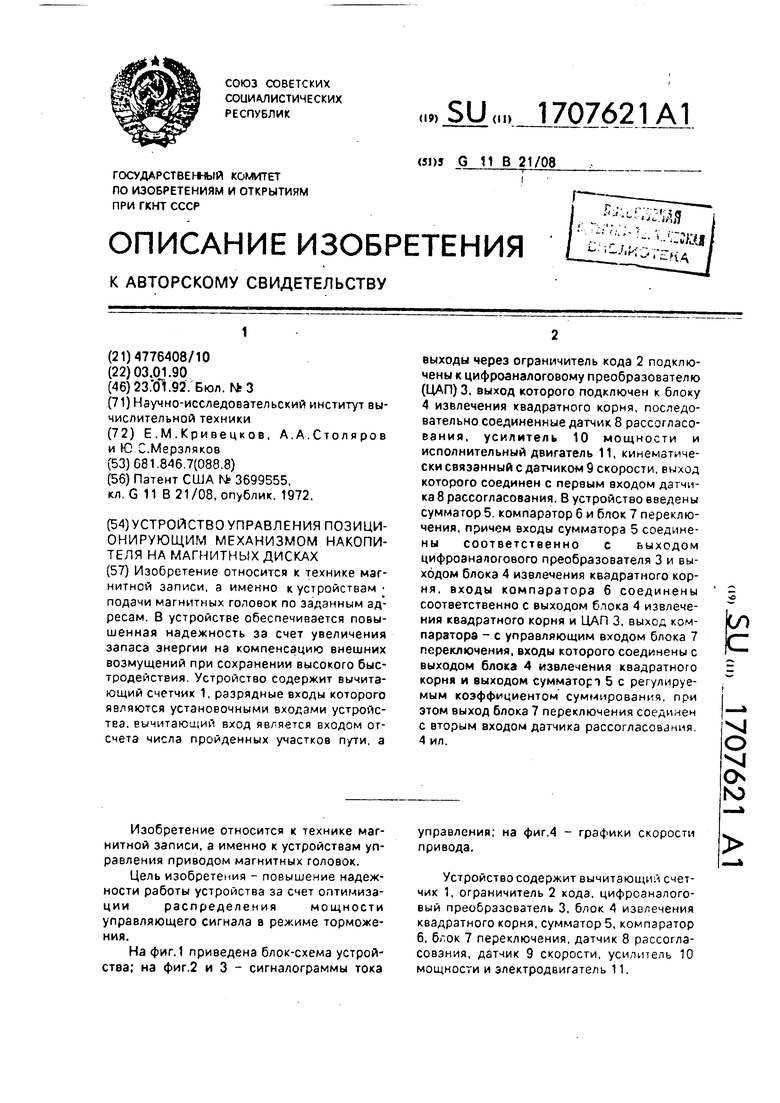
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| РЕЛЕ РАЗНОСТИ ЧАСТОТ ПОДКЛЮЧАЕМЫХ НА ПАРАЛЛЕЛЬНУЮ РАБОТУ ГЕНЕРАТОРОВ | 2011 |
|
RU2460193C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Двухканальная следящая система | 1983 |
|
SU1200236A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Бесконтактное переключающее устройство каналов для двухканальной системы | 1981 |
|
SU1019394A1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2269805C2 |
Изобретение относится к технике магнитной записи, а именно к устройствам подачи магнитных головок по заданным адресам. В устройстве обеспечивается повышенная надежность за счет увеличения запаса энергии на компенсацию внешних возмущений при сохранении высокого быстродействия. Устройство содержит вычитающий счетчик 1, разрядные входы которого являются установочными входами устройства, вычитающий вход является входом отсчета числа пройденных участков пути, а выходы через ограничитель кода 2 подключены к цифроаналоговому преобразователю (ЦАП) 3, выход которого подключен к блоку 4 извлечения квадратного корня, последовательно соединенные датчик 8 рассогласо- вания. усилитель 10 мощности и исполнительный двигатель 11, кинематически связанный с датчиком 9 скорости, выход которого соединен с первым входом датчика 8 рассогласования. В устройство введены сумматор 5, компаратор 6 и блок 7 переключения, причем входы сумматора 5 соединены соответственно с выходом цифрозналогового преобразователя 3 и выходом блока 4 извлечения квадратного корня, входы компаратора б соединены соответственно с выходом блока 4 извлечения квадратного корня и ЦАП 3, выход компаратора - с управляющим входом блока 7 переключения, входы которого соединены с выходом блока 4 извлечения квадратного корня и выходом сумматор т 5 с регулируемым коэффициентом суммирования, при этом выход блока 7 переключения соединен с вторым входом датчика рассогласования. 4 ил. (Л С VI О XI О ю
| Патент США № 3699555 | |||
| кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
