Изобретение относится к авиационной технике, а именно к измерению воздушной скорости летательного аппарата.
Целью изобретения является повышение точности измерения воздушной скорости на больших аэродинамических углах.
На чертеже приведена схема для реализации предлагаемого способа, в состав которой вводят: приемник воздушных давлений 1 с отверстием 2 и трубопроводом 3 полного давления Рп и полостью полного давления 4, с приемными отверстиями 5 и трубопроводом 6 статического давления Рст и полостью статического давления 7, приемник температуры заторможенного потока 8 с датчиком температуры 9, датчик 10 температуры воздуха в полости полного давления 4, канал 11, соединяющий полости полного 4 и статического 7 давлений, датчик 12 скорости перетекания воздуха в канале 11, вычислитель 13, первый вычитатель 14, инерциальная навигационная система 15, второй вычитатель 16, управляемый по величине аэродинамического угла контакт 17, датчик аэродинамических углов 18, усилитель 19, интегратор 20 и трений вычитатель 21.
Приемник воздушных давлений 1 своим приемным отверстием 2 через трубопровод 3 подключен к полости полного давления 4, а приемными отверстиями 5 через трубопровод 6 к своей полости статического давления 7. Полости 4 и 7 соединительным каналом 11 подключены к датчику 12 скорости перетекания воздуха, а выход датчика 12 соединен с первым входом вычислителя 13, второй вход которого соединен с датчиком 10 температуры Тп воздуха в полости полного давления 4, а третий вход с выходом датчика 9 температуры Тт заторможенного потока воздуха, помещенного в приемник температуры 8.
Выход вычислителя 13 соединен с вторым входом первого вычитателя 14, первый вход которого подключен к инерциальной навигационной системе 15, а выход к первому входу второго вычитателя 16, соединенного через первый вход управляемого контакта 17, второй вход которого соединен с датчиком аэродинамических углов 18, с усилителем 19. Выход усилителя 19 через интегратор 20 подключен к второму входу третьего вычитателя 21, первый вход которого соединен с выходом инерциальной навигационной системы 14. Выход интегратора 20 подключен также к второму входу вычитателя 16.
Принцип предлагаемого способа основан на использовании известного соотношения "треугольника скоростей", заключающегося в том, что алгебраическая сумма путевой W, воздушной V скоростей и скорости ветра U, равную нулю (1).
V + U V 0. (2)
Так как режимы полета летательного аппарата на больших аэродинамических углах скоротечны и не превышают по длительности 5-10 с, а постоянная составляющая скорости ветра на высоте изменяется медленнее на один-два порядка, то, запоминая на время маневра ее среднее значение
U  (3) и алгебраически суммируя его с измеренным значением путевой скорости W, получаем оценку воздушной скорости летательного аппарата
(3) и алгебраически суммируя его с измеренным значением путевой скорости W, получаем оценку воздушной скорости летательного аппарата (t)=W(t)-(
(t)=W(t)-( ) (4)
) (4)
Преимущество предлагаемого способа состоит в том, что наличие конечных погрешностей ΔW и Δ(W-V) измерения путевой скорости W, разности W-V, необходимых для определения воздушной скорости по предложенному способу, при любых значениях аэродинамических углов приводит к конечной погрешности ее определения и не зависит от величины углов.
Предлагаемый способ, в соответствии со схемой, представленной на чертеже, осуществляется следующим образом.
Из воздушного потока, движущегося со скоростью V, с помощью отверстий 5 приемника воздушных давлений 1 отбирают часть воздуха со статическим давлением Рст и по трубопроводу 6 подают в полость статического давления 7. Часть воздушного потока тормозят в приемном отверстии 2 приемника 1 до нулевой скорости и заторможенный воздух с давлением Рп подают по трубопроводу 3 в полость полного давления 4, часть воздушного потока тормозят в приемнике температуры 8 до нулевой скорости, соединяют полость 4 полного давления с полостью 7 статического давления каналом 11. С помощью датчиков температуры 9 и 10 измеряют соответственно температуру заторможенного потока Тт в приемнике температуры 8 и температуру воздуха Тп в полости полного давления 4. С помощью датчика 12 измеряют скорость Vп движения воздуха в соединительном канале 11, измеренные величины передают в вычислитель 13, где по формуле
V= Vп•  (5) определяют воздушную скорость летательного аппарата в диапазоне малых значений аэродинамических углов.
(5) определяют воздушную скорость летательного аппарата в диапазоне малых значений аэродинамических углов.
С выхода вычислителя 13 сигнал скорости V подается на второй вход вычислителя 14, на первый вход которого с выхода инерциальной системы 15 подается сигнал путевой скорости W. На выходе вычитателя 14 формируется разность W-V между путевой и воздушной скоростями, поступающая далее на первый вход вычитателя 16 и с его выхода на первый вход управляемого контакта 17, на второй вход которого подается сигнал датчика аэродинамических углов 18, с выхода которого через усилитель 19 сигнал подается на интегратор 20, соединенный выходом с вторыми входами вычитателей 16 и 21.
Последовательно соединенные вычитатель 16, контакт 17, усилитель 19 и интегратор 20, замкнутые обратной связью через выход интегратора 20 и второй вход вычитателя 16, образуют фильтр, динамические свойства которого описываются апериодическим звеном с постоянным времени τ= 1/K, где К коэффициент усиления усилителя 19, выбираемый из условия обеспечения необходимой длительности переходного процесса и фильтрации флюктуационных составляющих разности скоростей. На выходе интегратора 20 формируется среднее значение разности (( )). При достижении заданного значения аэродинамического угла (значения, при котором приемник воздушных давлений начинает воспринимать полное давление Рп с погрешностями выше допустимых значений) контакт 17 размыкается, сигнал на входе интегратора 20 становится равным нулю, а на его выходе запоминается (сохраняется среднее на момент отключения значение скорости ветра
)). При достижении заданного значения аэродинамического угла (значения, при котором приемник воздушных давлений начинает воспринимать полное давление Рп с погрешностями выше допустимых значений) контакт 17 размыкается, сигнал на входе интегратора 20 становится равным нулю, а на его выходе запоминается (сохраняется среднее на момент отключения значение скорости ветра  (
( ), поступающее на второй вход вычитателя 21, на первый вход которого с выхода инерциальной навигационной системы 15 подается текущее значение путевой скорости W(t), а на его выходе формируется сигнал текущего значения воздушной скорости
), поступающее на второй вход вычитателя 21, на первый вход которого с выхода инерциальной навигационной системы 15 подается текущее значение путевой скорости W(t), а на его выходе формируется сигнал текущего значения воздушной скорости (t)=W(t)-(
(t)=W(t)-( )
)
Как показано моделирование полета самолета на различных траекториях полета по сравнению с результатами моделирования известного способа заявленный способ позволяет расширить диапазон углов атаки, в котором воздушная скорость самолета измеряется с регламентируемой погрешностью до величины ±90о и повысить точность ее измерения в 1,2 раза в диапазоне углов атаки ±15- ±45о.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ В ПОЛЕТЕ ПРИЕМНИКОВ ВОЗДУШНЫХ ДАВЛЕНИЙ | 2024 |
|
RU2834981C1 |
| Измеритель воздушной скорости летательного аппарата | 1988 |
|
SU1638628A1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
Изобретение относится к авиационной технике, а именно к способам измерения скорости. Целью изобретения является повышение точности на больших аэродинамических углах атаки. Измеряют параметры потока воздуха с помощью приемника воздушного давления 1, датчиком 12 измеряют скорость движения воздуха в соединительном канале 11, измеряют температуру воздуха в канале 11 и температуру торможения, вычисляют воздушную скорость на малых углах атаки. Замеряется инерциальной системой 15 путевая скорость, а затем с помощью вычислителя 14 и вычитателей 16 и 21 определяется текущая воздушная скорости на больших углах атаки. 1 ил. 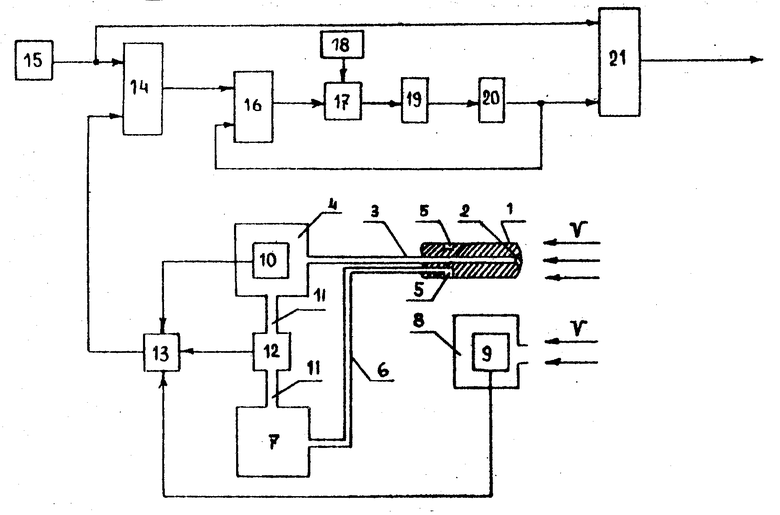
СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА, заключающийся в том, что измеряют полное давление, статическое давление, температуру торможения потока и функционально вычисляют воздушную скорость, отличающийся тем, что, с целью повышения точности на больших аэродинамических углах, дополнительно измеряют путевую скорость, вычисляют разность между воздушной и путевой скоростями, и при выходе летательного аппарата на большие аэродинамические углы определяют воздушную скорость как алгебраическую сумму текущего значения путевой скорости и вычисленной разницы между воздушной и путевой скоростями.
| Бабич О.А | |||
| Авиационные приборы и навигационные системы | |||
| М.: ВВИА им.проф.Н.Е.Жуковского, 1981, с.126-131, с.144-175, рис.1.1. |
