2. Устройство поп. l.oTnHqafo ш в е с я тем, что оно снабжено фиксаторами кареток, вьтопненными в виде установленных с зазором с двух сторон допопнитепьных направляющих пьезокерамрческих стержйей, каждый из которых жестко закреплен между двумя упругими мембранами.
3. Устройство по п. 1, о т п и ч а ю щ е е с я тем, что поворотный стоп снабжен предметной ппитой, закреппенной на нем посредством упругих эпементов, пьезокерамическими виброопорами, закрепленными на предметной ппите, и регулируемыми опорами, расположенными на поворотном стопе напротив пьезокерамических виброопор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| Устройство к прессу для подачи кареток с резаками в рабочую зону пресса и выталкивания из них изделий и отходов | 1978 |
|
SU856835A1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
| Комплекс для экспедирования газет | 1986 |
|
SU1359233A1 |
| Устройство для подачи брусков под пакет листов | 1990 |
|
SU1819714A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU929284A1 |
| Устройство для ориентации подложек | 1980 |
|
SU917365A1 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОЛУСУХИХ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2005 |
|
RU2279974C1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU729085A1 |

1. УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАННОГО ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ, преимущественно установок цпя контроля фотошабпо1 в, содержащее две каретки, установпенные одна над другой в направляющих, поворотный стоп, устаиовпенвый на одной иэ кареток, и приводные метаниамы для перемещения )/ кареток и стопа, о тпичающеес я тем, что, с цепью повышения точности ориентирования, оно снабжено допопнитепьными направляющими, закрепленными на каретках, приводные механиа.мы дпя перемещения кареток и стола выполнены в виде пьезодвигателей, а каждый из пьезодвигателей перемещения кареток выполнен в виде двух прямоугольных пьезокерамических пластин, расположенных с двух сторон дополнительной направляющей, причем каждая из пьезокерамическ1пс пластин выполнена из четырех секций, расположенных по ее углам, а секции, расположенные по диагоналям пьезокерамической пластины, элек- S . трически- попарно .соединены между соО) С бой и с аналогичными секциями другой пьезокерамической пластины пьезодвигателя.
Изобретение относится к точной механике, в частности к механизмам, обео печиваюшим прецизионные пинейные и угловые перемещения дпя обработки, контропя, измерения изцепий электронной техники. Изобретение наиболее эф гективно может быть использовано для контроля фотошабпонов„ в ультразвуковой сварке, в рентгенопитографии, в электроннолучевой литографии и т.д. Изэестно устройство дпя ориентации иэдедвйг содержащее платформу, координатный стоп и механизм перемещения стопа. Координатный стол установлен на платформе посредством упругих пластин, один конец Koroffcix жестко закреплен на ппатформе, а другой - на столе; механиз перемещений выполнен, в виде пьезокерамической ппастиньг, в центре которой, перпендикулярно к ее плоскости, установлен упор, взатлоцействующий со столом l 1 Недостатке этого устройства явпяютсянеаначитепьные величины линейных Перемещений, незначительные развиваемые усилия и, кроме этого, при перемещении происходит изменение фокусного расстояния (измерение расстояния по вертикальной координате). Наиболее близким техническим решейием к взобретенйю является устройство для ориентированного перемещения издеnHfij содержащее две каретки, установпеяные одна над другой в направляюш сх поэоротный стол, установленный на одной иэ кареток, и приводные механизмы дпя перемещения кареток и стода 2. Недостатком известного устройства является низкая точность ориентированиЯу обусловленная конструкцией приводных механизмов стола и кареток. Цепь изобретения - повышение точности ориентирования. Цель достигается тем, что устройство дпя ориентированного перемещения взде г-ий, содержащее две каретки, установленные одна над другой в направляющих, поворотный стол, установленный на одной аз кареток, и приводные механизмы для перемещения кареток и стола, снабжено дополнительными направляющими, закрепленными на каретках, приводные механизмы для перемещения кареток и стола выпоп1эны в виде пьезодвигателей,а каждый из пьезодвигатедей перемещения кареток выполнен в виде двух прямоугольных пьезокерамических ппастин, расположенных с двух сторон дополнительной направляющей, причем каждая из пьезокерамических пластин выполнена из четырех секций, расположенных по ее углам, а секции, расположенные по диагоналям пьезокерамической пластины электрически попарно соединены между собой и с аналогичными секциями другой йьезокеремической пластины пьезодвигателя. Устройство тйкже снабжено фиксаторами кареток, выполненными в виде установленных с зазором с двух сторон дополнительных направляющих пьезок&рамических стержней, каждый из которых жестко закреплен между двумя упругими Мембранами. Поворотный стол устройства снабжен предметной плитой, закрепленной на нем посредством упругих элементов, пьезокерамическими виброопорами, закрепленными на 1федметной ппите, и регулируемыми опорами, расположенными на гповоротном столе нащютив пЬезокерам ческих виброопор. На ФЕО. изображено устройство, общий вид в разрезе; на фесг. 2 - то же.
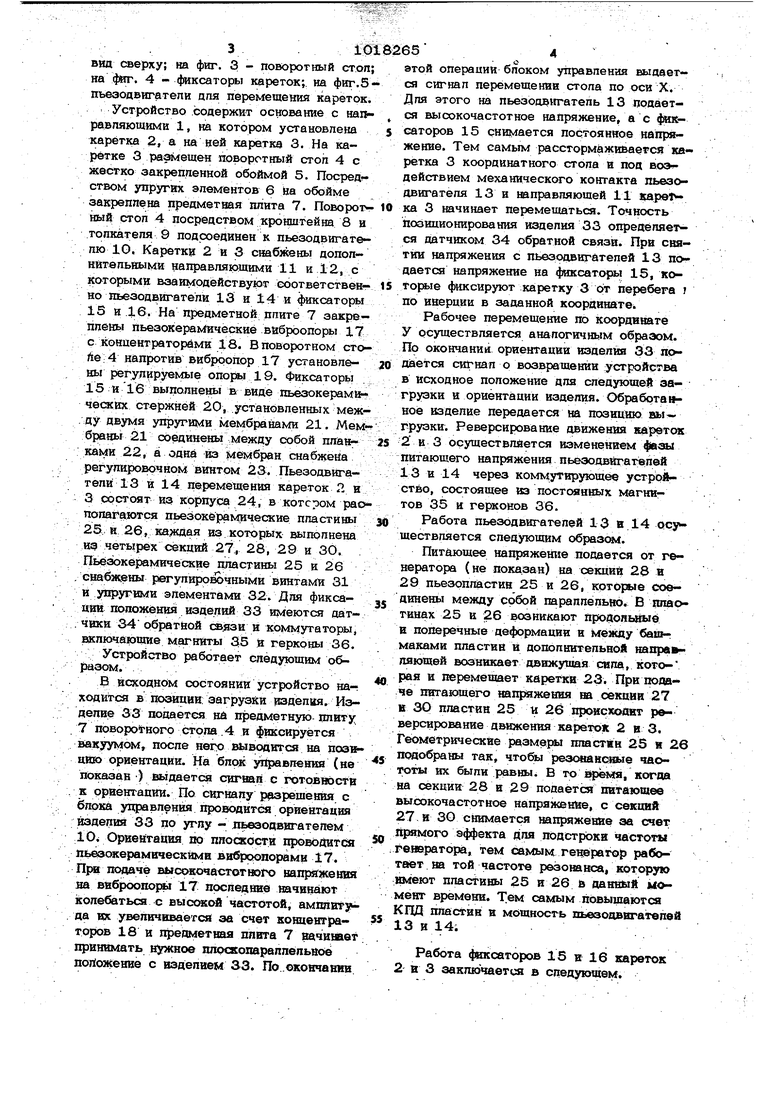
вид сверху; на фиг. 3 - поворотный стоп; ва фиг. 4 - фиксаторы кареток; на фиг.5Пьеаодвнгатепи цпя перемещения кареток.
Устройство содержит основание с направпяюшими 1, на котором установлена каретка 2, & на ней каретка 3. На каретке 3 ра0лешен поворотный стоп 4с жестко закрепленной обоймой 5. Посред ством упругих элементов 6 на обойме закреплена предметная плита 7. Поворот ный стоп 4 посредством кроиштейна 8 и толкателя 9 подсоединен к пьезодвигатепю 10. Каретки 2 и 3 с шбжены дополните льйыми направляющими 11 и 12, с которыми взаимодействуют соответствен- но пьезодБИгатепи 13 и 14 и фиксаторы 15 и 16. На предметной ппите 7 закреплены пьезокерамическиё виброопоры 17 с концентраторами 18. В поворотном стойе; 4 напротив вибрропор 17 установлены perynijipyeMbie 19. Фиксаторы 15 и 16 выполнены в виде пьезокерам ческих стержней 20, установленных меж. ду двумя упругими мембранами 21. Мемб1 ны 21 соединены между собой планками 22, а одна из мембран снабжена регулировочном винтом 23. Пьезодвйгатели 13 и 14 перемещения кареток Л и 3 состоят из корпуса 24, в котором расхпопа1гаются пьезокерамическиё: пластины 25. и 26, каждая из которых выполнена иэ четырех секций 27:, 28, 29 и 30. Пьёэокерамические пластины 25 и 26 снабжены регулировочными винтами 31 И ущругими элементами 32. Для фиксацшпопожёния изделий 33 имеются дат. чвки 34 обратной связи и коммутаторы, включающие магниты 3t5 и геркойы 36.
Устройство работает следующим о&разом. ..:
В исходном состоянии устройство на- ходится в позиции: загруз&и изделия. Изделие 33 подается на предметную тшЕту; 7 поворотного стопа .4 и фиксируется вакуумом, после него выводится на позицию ориентации. На блок уйравления (не показан ) вь1дается сцгшп с готовности Е ориентации. По сигналу р решенйя с блока управления проводится ориентация 11здел{1я 33 по угпу - льезоцвнгатепем lOv Ориентация по плоскости проводится :пьезокерамическима виброопорами 17. Прв подаче высокочастотного saivfxsjfosws аа виброопо ш 17 прспедняе начинают колебаться с вы с(Ж(Л частотой, амЕЕлвт; да их увепичвваетоя за счет концеитраторов 18 и предметная плита 7 вачи(вет принимать нужное ппрскопараплёпьвое положение с изделием 33. По окоичавии
этой операции блоком управления выдается сигнал перемещении стола по оси X. Для этого на пьезодвнгатель 13 подается высокочастотное напряжение, а с фиксаторов 15 снимается постоянное напряжение. Тем самым расстормаживается каретка 3 координатного стола И под воздействием механическсиго контакта пьезодвигателя 13 и направняющей 11 карв ка 3 начинает перемещаться. Точность позиционирования изделия 33 определяется датчиком 34 обратной связи. При снятии напряжения с пьезодвигателей 13 подается напряжение на фиксаторь 15, коTopfcie фиксируют каретку 3 от перебега J по инерции в заданной координате.
Рабочее перемещение по координате У осуществляется аналогичным образом. По окончаний ориентации изделия 33 подается сигнал о возвращении устройства в Исходное положение для следующей загрузки и ориентации изделия. Обработанное изделие передается на позицию вы грузки. Реверсирование движения кареток 2 и 3 осуществляется изменением фазы питающего напряжения пьеэодвИгатвпей 13 и 14 через коммутирующее устройство, состоящее вз постоянных магнитов 35 и геркойов 36.
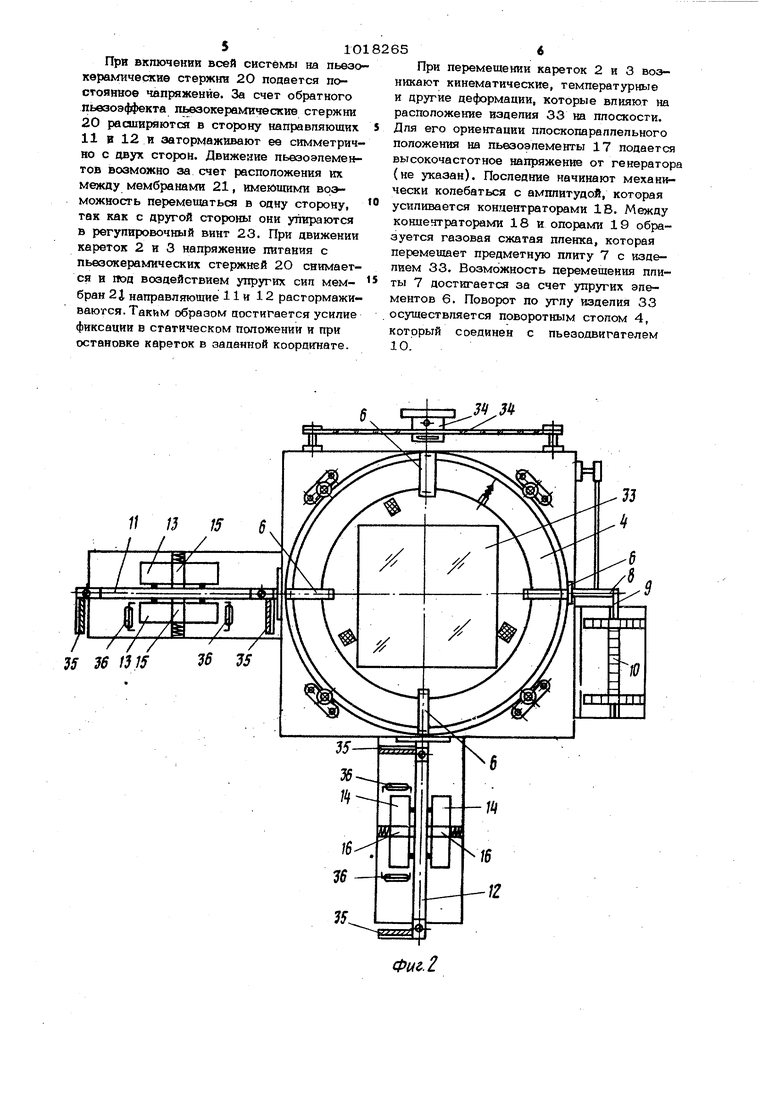
Работа пьезодвигателей 13 в 14 осу ществляется следующим образом.
Питающее напряжеш1е подается от генератора (не показан) на секции 28 и 29 пьеарпластин 25 и 26, которые соединень между собой параллельно. В ппаотинах 25 и 26 возникают проаопьйыё и поперечные деформации и МёхсДу башмаками пластии И дополнительной направляющей возникает движущая сигш, которая и перемещает каретки 23- При подаче питающего напряжения ва секции 27 в 30 пластин 25 и 26 происходит реверсирование движения кареток 2 и 3. Геометрические {жзмеры пластин 25 и 2 подобраны так, чтобы резовансгаые чаоготы их были равны. В то время, когда ва секции 28 и 29 подаётся питающее высокочастотное напряжение, с секций 27 и 30 снимается напртжение за счет првгмогчз эффекта для подстрока частоты : генератора,, тем самым rei parol} работает ва той частоте резонанса, которую Шмсеют плаогины 25 и 26 в данный йомект времени. Тем самым повышаются КГШ пласгив и мощность оьезодввгатепв 13 и 14;
Работа фиксаторов 15 и 16 кареток 2 и 3 закшочается в следующем. При включении всей сисгемы на пьезоквракгачесжие стержни 20 поцается постоянное напряжение. За счет обратного пьвзоэффекта пьезокерамические стержни 20 расширяются в сторону направляющих 11 в 12 и затормаживают ее симметрично с двух сторон. Движение пьеэоэпементов возможно за счет расположения юс между мембранами 21, имеющими возможность перемещаться в одну сторону, так как с другой стороны они упираются в регупировочный винт 23. При движении кареток 2 и 3 напряжение питания с пьезокерамических стержней 2О снимается и иод воздействием упругих сип мембран 2i направляющие 11 и 12 растормаживаются. Такйм образом цостигается усилие фиксации в статическом положении и при остановке кареток в запаиной координате. // 0 15 6, I / / / / / 5 75 5 /f/
Фиг. 2 При перемещении кареток 2 и 3 возникают кинематические, температурные и другие деформации, которые влияют на расположение изделия 33 на плоскости. Для его ориентации ппоскопараллепьного положения на пьезоэлементы 17 подается высокочастотное напряжение от генератора (не указан). Последние начинают механически колебаться с амплитудой, которая усиливается концентраторами 1В. Между концентраторами 18 и опорами 19 образуется газовая сжатая пленка, которая перемещает предметную ппиту 7 с изделием 33. Возможность перемещения плиты 7 достигается за счет упругих элементов 6. Поворот по углу изделия 33 осуществляется поворотным столом 4, который соединен с пьезодвигателем 10. Л 5«
33 I
г t
Фиг.
24
gf 0 Выкод
+ +
Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОРИЕНТАЦИИ "ПОДЛОЖЕК | 0 |
|
SU379065A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
