Изобретение относится к устройствам для стабилизации движения летательных аппаратов (ЛА).
Цель изобретения улучшение динамических характеристик.
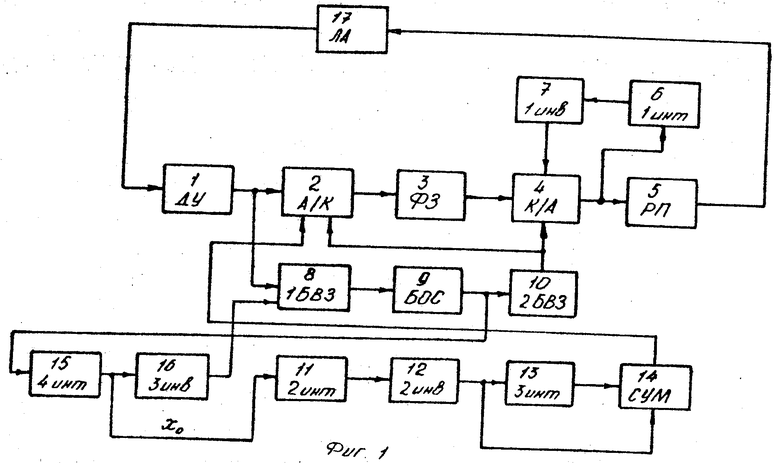
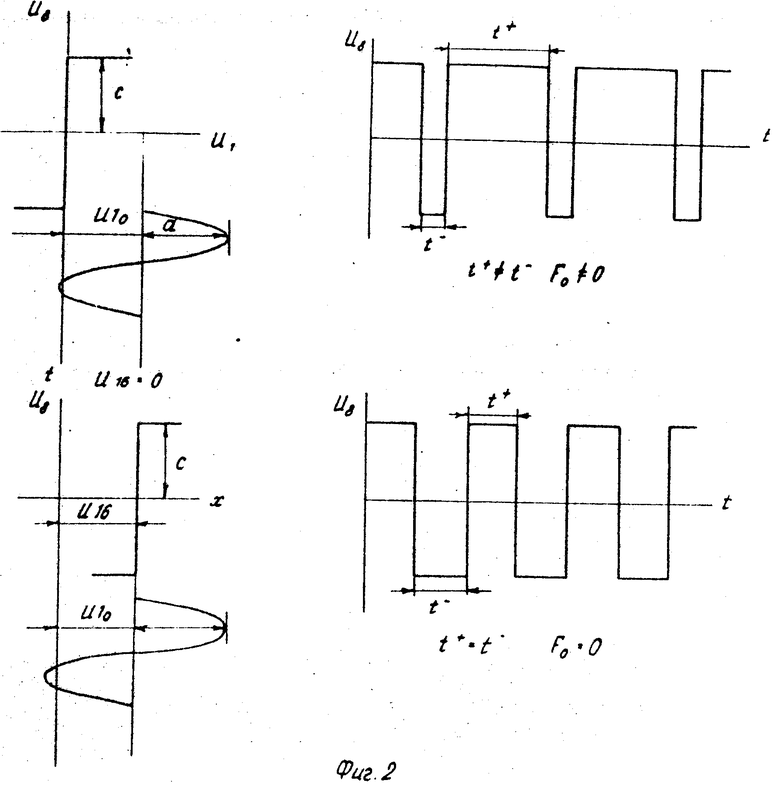
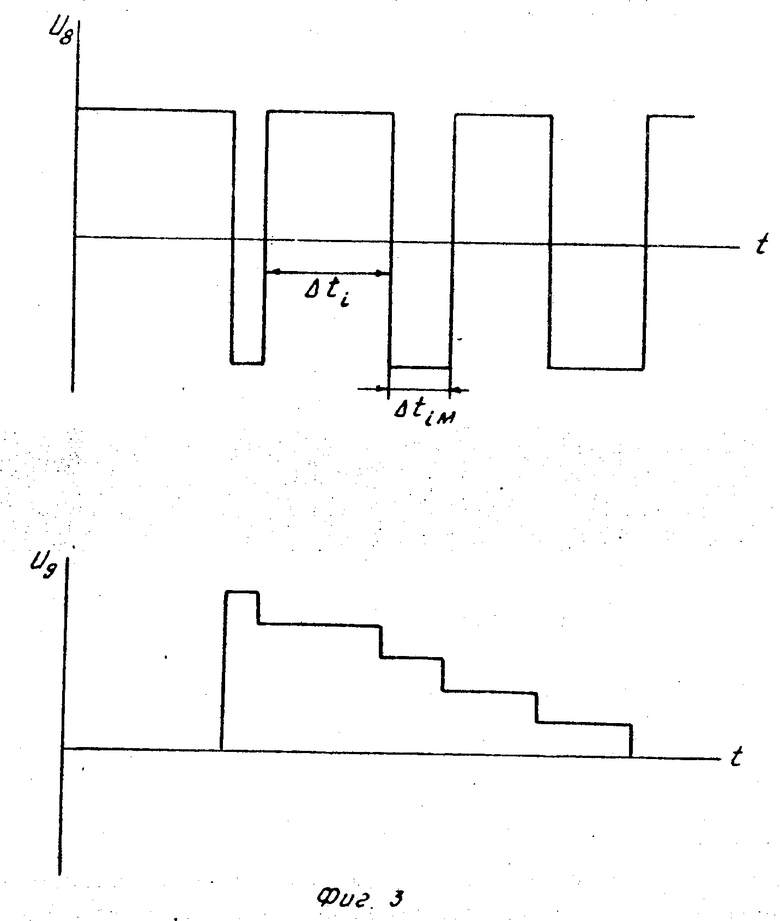
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг.2 статическая характеристика первого блока выделения знака и эпюры сигналов на его входе и выходе; на фиг.3 эпюры сигналов на входе и выходе блока.
На фиг.1 обозначены: 1 датчик отклонения углового положения летательного аппарата от программного значения; 2 преобразователь аналог-код; 3 форсирующее звено; 4 преобразователь код-аналог; 5 рулевой привод органов управления; 6 первый блок интегрирования; 7 первый инвертор; 8 первый блок выделения знака сигнала; 9 блок определения функции смещения; 10 второй блок выделения знака сигнала; 11 второй блок интегрирования; 12 второй инвертор; 13 третий блок интегрирования; 14 сумматор; 15 четвертый блок интегрирования; 16 третий инвертор.
Устройство содержит последовательно соединенные датчик отклонения углового положения летательного аппарата от программного значения 1, преобразователь аналог-код 2, форсирующее звено 3, преобразователь код-аналог 4, рулевой привод органов управления 5, последовательно соединенные первый блок интегрирования 6, вход которого подключен к входу рулевого привода органов управления 5, и первый инвертор 7, выход которого соединен с вторым входом преобразователя код-аналог 4, последовательно соединенные первый блок выделения знака 8, первый вход которого подключен к первому входу преобразователя аналог-код 2, блок определения функции смещения 9 и второй блок выделения знака 10, выход которого соединен с вторым входом преобразователя аналог-код 2 и с третьим входом преобразователя код-аналог 4, последовательно соединенные четвертый блок интегрирования 15, вход которого соединен с входом второго блока выделения знака 10, второй блок интегрирования 11, второй инвертор 12, третий инвертор 13 и сумматор 14, выход которого подключен к третьему входу преобразователя аналог-код 2, вход третьего блока интегрирования 13 соединен с вторым входом сумматора 14, третий инвертор 16, вход которого подключен к выходу четвертого блока интегрирования 15, а выход к второму входу первого блока выделения знака 8.
Устройство работает следующим образом.
Датчик отклонения углового положения летательного аппарата от программного значения 1 измеряет угловое положение аппарата, возникшее вследствие воздействия на него комплекса возмущений. На выходе его образуется сумма полезного сигнала, пропорционального отклонению стабилизируемого аппарата, и сигналов помех, поступающих на первый вход преобразователя аналог-код 2. Преобразователь аналог-код 2 имеет статическую характеристику реле с зоной нечувствительности и является фильтром высокочастотных по сравнению с полезным сигналом помех, амплитуда которых значительно меньше амплитуды полезного сигнала, и пропускает эти помехи только вблизи моментов переключения реле из одного положения в другое. С выхода преобразователя аналог-код 2 сигнал поступает на форсирующее звено 3.
Алгоритм работы форсирующего звена имеет вид
Uзп К1U2n K2U2n-1
n 1, 2, 3, где U2n, U2n-1 сигналы на выходе преобразователя аналог-код 2 в настоящий и предыдущий моменты времени;
Uзn сигнал на выходе форсирующего звена 3.
С выхода форсирующего звена 3 сигнал поступает на вход преобразователя код-аналог 4, имеющего двухступенчатую релейную характеристику. Выход преобразователя код-аналог 4 соединен с входами рулевого привода органов управления 5 и первого блока интегрирования 6. Рулевые органы создают управляющий момент и воздействуют на стабилизируемый аппарат, компенсируя тем самым воздействие возмущений, приложенных к нему. Выход блока интегрирования 6 соединен через первый инвертор 7 с вторым входом преобразователя код-аналог 4. Охват преобразователя код-аналог 4 интегрирующей отрицательной обратной связью обеспечивает преобразование релейного сигнала на выходе преобразователя 4 в высокочастотную последовательность импульсов. Частота следования импульсов определяется постоянной времени блока интегрирования 6. Для уменьшения инерционности обратной связи необходимо обнулять блок интегрирования после каждого переключения реле
U8n 0, при U4n и U4n-1 ≅ 0
n 1, 2, 3, где U8n сигнал на выходе первого блока интегрирования 6;
U4n, U4n-1 настоящее и предыдущее значение сигнала на выходе преобразователя код-аналог 4.
Данное преобразование релейного сигнала на выходе преобразователя 4 в высокочастотную последовательность импульсов позволяет исключить резкие перемещения выходного вала рулевого привода органов управления 5 и тем самым дает возможность предотвратить возбуждения упругих колебаний корпуса летательного аппарата. При этом необходимо обеспечить, чтобы период следования импульсов был бы значительно меньше, чем постоянная времени рулевого привода органов управления 5.
Первый блок выделения знака 8 представляет собой релейный элемент с регулируемым смещением статической характеристики. Сигнал с его выхода поступает на вход блока определения функции смещения 9, который определяет среднее за период изменения значение сигнала.
Алгоритм работы блока определения функции смещения 9 имеет вид При
U9n U9n-1 ≅ 0
U10n C (Δti+1 Δ ti) При
U9n U9n-1 > 0
U10n 1010n-1
n 1, 2, 3, i 1, 2, 3,
Δti+1, Δti длительность импульсов на входе блока 9 (фиг.3).
Сигнал с блока определения функции смещения 0 подается на второй блок выделения знака 10, имеющий одноступенчатую релейную характеристику без зоны нечувствительности, который в зависимости от знака функции смещения, а этот знак соответствует знаку медленно меняющейся составляющей периодического процесса на выходе устройства (датчика отклонения углового положения ЛА от программного значения 1), а значит и знаку внешнего возмущения, приложенного к ЛА, изменяет вид статических характеристик преобразователей 2, 4 с положительного на отрицательный и наоборот. Такое изменение вида статических характеристик преобразователей 2, 4 обеспечивает однополярный сигнал на их выходе, что уменьшает амплитуду быстроменяющейся составляющей периодического процесса в системе стабилизации.
Сигнал с выхода четвертого блока интегрирования 15, на вход которого поступает сигнал с выхода блока выделения функции смещения 9, подается через инвертор 16 на второй вход первого блока выделения знака 8. В результате этого осуществляется регулирование смещения статической характеристики первого блока выделения знака 8 в соответствии с алгоритмом
U16= U
U16, U*16 соответственно текущее и начальное значение смещения статической характеристики первого блока выделения знака 8.
Как видно из фиг.2, при увеличении смещения статической характеристики блока 8 изменяются длительность положительных и отрицательных импульсов на его выходе, при этом уменьшается величина функции смещения U9 (фиг.3). При U16 U10t+= t- и функция смещения становится равной нулю. U10 медленно меняющаяся составляющая сигнала на выходе датчика угла 1.
Если в зависимости положить U *16 0, то можно считать, что при U90 F 0 U16 -U16 U10, то есть сигнал на выходе первого блока интегрирования 15 представляет собой медленно меняющуюся составляющую сигнала на выходе датчика отклонение углового положения ЛА от программного значения 1, которая пропорционально медленно меняющейся составляющей угла разворота ЛА.
Сигнал с выхода четвертого блока интегрирования 15 подается на вход второго блока интегрирования 11 и далее через второй инвертор 12, третий блок интегpирования 13 и сумматор 14 на третий вход преобразователя аналог-код 2. В результате этого происходит регулирование его зоны нечувствительности по закону
b bo-Kn1U10dt-Km ∫∫ U10dt2 где b1 bo текущее и начальное значения зоны нечувствительности преобразователя 2. Изменение зоны нечувствительности будет происходить до тех пор, пока не станет равной нулю медленно меняющаяся составляющая Хо, то есть пока не станет равной нулю медленно меняющаяся составляющая угла разворота ЛА при действии как постоянного, так и линейно изменяющегося внешних возмущений.
Итак, использование непосредственно медленно меняющейся составляющей Хо, а не функции смещения, позволит осуществить плавное перерегулирование уменьшения Хо, что даст возможность улучшить существенно динамические характеристики устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
Изобретение относится к устройствам для стабилизации движения летательных аппаратов. Целью является улучшение динамических характеристик устройства для угловой стабилизации летательного аппарата, содержащее датчик отклонения углового положения летательного аппарата от программного значения, преобразователь аналог-код, форсирующие звено, преобразователь код-аналог, рулевой привод органов управления, первый и второй и третий блоки интегрирования, первый и второй инверторы, первый и второй блоки выделения знака сигнала, блок определения функции смещения и сумматор, за счет введения в него последовательно соединенных четвертого блока интегрирования и третьего инвертора, вход которого связан с вторым входом первого блока выделения знака сигнала, причем вход четвертого блока интегрирования связан с выходом блока определения функции смещения, а его выход-с вторым входом второго блока интегрирования. 3 ил.
УСТРОЙСТВО ДЛЯ УГЛОВОЙ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее последовательно соединенные датчик отклонения углового положения летательного аппарата от программного значения, преобразователь аналог код, форсирующее звено, преобразователь код аналог, и рулевой привод органов управления, последовательно соединенные первый блок интегрирования, вход которого связан с выходом преобразователя код аналог, и первый инвертор, выход которого связан с вторым входом преобразователя код аналог, последовательно соединенные первый блок выделения знака сигнала, блок определения функции смещения и второй блок выделения знака сигнала, выход которого соединен с третьим входом преобразователя код аналог, а также с вторым входом преобразователя аналог - код, последовательно соединенные второй блок интегрирования, второй инвертор, третий блок интегрирования и сумматор, выход которого связан с третьим входом преобразователя аналог код, а второй вход с выходом второго инвертора, причем первый вход первого блока выделения знака сигнала связан с выходом датчика отклонения углового положения летательного аппарата от программного, отличающееся тем, что, с целью улучшения динамических характеристик, в него введены последовательно соединенные четвертый блок интегрирования и третий инвертор, выход которого соединен с вторым входом первого блока выделения знака сигнала, причем вход четвертого блока интегрирования связан с выходом блока определения функции смещения, а его выход с входом второго блока интегрирования.
| Авторское свидетельство СССР N 1259629, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
